2
2010
... 对于目标意图的识别,《孙子兵法》中提到“知己知彼,百战不殆”,其中的“知彼”就包含掌握敌方情况并识别其意图之意.随着制空权在现代战争中的地位越来越高,空中战场成为各国军事博弈的关键领域.为了全面感知空中战场态势,包含雷达、预警机、卫星在内的各类传感器不断涌现,对空中目标形成了全方位、多维度的预警探测能力.面对复杂多变的空中战场态势,指挥员想要掌握战争主动权,制胜沙场,识别空中目标的意图是态势评估的关键一步.为此,1985年美国实验室理事联合会(the joint directors of laboratories, JDL)在JDL信息融合模型中提及影响评估(impact assessment)的任务之一是要对敌方的作战企图给出指示和告警[1]. ...
... JDL模型是美国三军组织——实验室理事联合会提出的信息融合经典模型,如图2所示.JDL一共分为4级处理过程:第1级是目标评估,主要是进行数据配准、数据关联,以及目标位置、运动学参数、属性参数和身份的估计;第2级是态势评估,主要是分析兵力分布情况,并识别敌方的意图和行动计划;第3级是影响评估,即威胁估计,主要是对敌方行为可能对己方产生的威胁发出预警;第4级是过程评估,主要是对整个信息融合过程进行监测和评价,以此实现信息自动获取和处理,最优化分配资源,提升信息融合的效率[1]. ...
2
2010
... 对于目标意图的识别,《孙子兵法》中提到“知己知彼,百战不殆”,其中的“知彼”就包含掌握敌方情况并识别其意图之意.随着制空权在现代战争中的地位越来越高,空中战场成为各国军事博弈的关键领域.为了全面感知空中战场态势,包含雷达、预警机、卫星在内的各类传感器不断涌现,对空中目标形成了全方位、多维度的预警探测能力.面对复杂多变的空中战场态势,指挥员想要掌握战争主动权,制胜沙场,识别空中目标的意图是态势评估的关键一步.为此,1985年美国实验室理事联合会(the joint directors of laboratories, JDL)在JDL信息融合模型中提及影响评估(impact assessment)的任务之一是要对敌方的作战企图给出指示和告警[1]. ...
... JDL模型是美国三军组织——实验室理事联合会提出的信息融合经典模型,如图2所示.JDL一共分为4级处理过程:第1级是目标评估,主要是进行数据配准、数据关联,以及目标位置、运动学参数、属性参数和身份的估计;第2级是态势评估,主要是分析兵力分布情况,并识别敌方的意图和行动计划;第3级是影响评估,即威胁估计,主要是对敌方行为可能对己方产生的威胁发出预警;第4级是过程评估,主要是对整个信息融合过程进行监测和评价,以此实现信息自动获取和处理,最优化分配资源,提升信息融合的效率[1]. ...
目标意图识别方法综述
1
2020
... 目前为止,目标意图识别的综述文献较少.文献[2-3]简单概括介绍了目标意图的基本定义和类型,以及常见的方法,未能对当前的研究进行较为系统的阐述和评价.文献[4]从对手建模的角度对目标意图识别的过程、类型和方法进行综述,视角具备一定的局限性.为了更加系统地研究目标意图识别,本文界定了目标意图和意图识别的概念定义,概述了从传统技术到人工智能时代意图识别技术的发展与运用,对比分析了当前目标意图识别方法的性能,并对未来研究方向进行了展望. ...
A Summary of Target Intention Identification Methods
1
2020
... 目前为止,目标意图识别的综述文献较少.文献[2-3]简单概括介绍了目标意图的基本定义和类型,以及常见的方法,未能对当前的研究进行较为系统的阐述和评价.文献[4]从对手建模的角度对目标意图识别的过程、类型和方法进行综述,视角具备一定的局限性.为了更加系统地研究目标意图识别,本文界定了目标意图和意图识别的概念定义,概述了从传统技术到人工智能时代意图识别技术的发展与运用,对比分析了当前目标意图识别方法的性能,并对未来研究方向进行了展望. ...
未来空战中的意图理解技术综述
1
2022
... 目前为止,目标意图识别的综述文献较少.文献[2-3]简单概括介绍了目标意图的基本定义和类型,以及常见的方法,未能对当前的研究进行较为系统的阐述和评价.文献[4]从对手建模的角度对目标意图识别的过程、类型和方法进行综述,视角具备一定的局限性.为了更加系统地研究目标意图识别,本文界定了目标意图和意图识别的概念定义,概述了从传统技术到人工智能时代意图识别技术的发展与运用,对比分析了当前目标意图识别方法的性能,并对未来研究方向进行了展望. ...
Summary of Intention Comprehension Technology in Future Air Combat
1
2022
... 目前为止,目标意图识别的综述文献较少.文献[2-3]简单概括介绍了目标意图的基本定义和类型,以及常见的方法,未能对当前的研究进行较为系统的阐述和评价.文献[4]从对手建模的角度对目标意图识别的过程、类型和方法进行综述,视角具备一定的局限性.为了更加系统地研究目标意图识别,本文界定了目标意图和意图识别的概念定义,概述了从传统技术到人工智能时代意图识别技术的发展与运用,对比分析了当前目标意图识别方法的性能,并对未来研究方向进行了展望. ...
面向对手建模的意图识别方法综述
1
2021
... 目前为止,目标意图识别的综述文献较少.文献[2-3]简单概括介绍了目标意图的基本定义和类型,以及常见的方法,未能对当前的研究进行较为系统的阐述和评价.文献[4]从对手建模的角度对目标意图识别的过程、类型和方法进行综述,视角具备一定的局限性.为了更加系统地研究目标意图识别,本文界定了目标意图和意图识别的概念定义,概述了从传统技术到人工智能时代意图识别技术的发展与运用,对比分析了当前目标意图识别方法的性能,并对未来研究方向进行了展望. ...
Survey of Intention Recognition for Opponent Modeling
1
2021
... 目前为止,目标意图识别的综述文献较少.文献[2-3]简单概括介绍了目标意图的基本定义和类型,以及常见的方法,未能对当前的研究进行较为系统的阐述和评价.文献[4]从对手建模的角度对目标意图识别的过程、类型和方法进行综述,视角具备一定的局限性.为了更加系统地研究目标意图识别,本文界定了目标意图和意图识别的概念定义,概述了从传统技术到人工智能时代意图识别技术的发展与运用,对比分析了当前目标意图识别方法的性能,并对未来研究方向进行了展望. ...
基于知识图谱的目标战术意图识别仿真
1
2019
... 从意图的基本内涵出发,文献[5-7]对目标意图定义为目标希望完成目的的基本打算和基本设想,其中基本打算指的是目标预定或计划想要完成的目标.结合军事背景,文献[8]定义目标意图是指敌方目标比较清楚地意识到要争取实现的目的和方法的需要,它通常以仅仅是设想而未付诸行动的企图和计划.限定战场空间,文献[9]定义空中目标的作战意图为空中目标欲达到某种作战目的而采取的行动计划.本文在此定义目标意图是目标为了完成某一任务或者达到某一目的而采取的行动和计划. ...
Simulation of Target Tactical Intention Recognition Based on Knowledge Map
1
2019
... 从意图的基本内涵出发,文献[5-7]对目标意图定义为目标希望完成目的的基本打算和基本设想,其中基本打算指的是目标预定或计划想要完成的目标.结合军事背景,文献[8]定义目标意图是指敌方目标比较清楚地意识到要争取实现的目的和方法的需要,它通常以仅仅是设想而未付诸行动的企图和计划.限定战场空间,文献[9]定义空中目标的作战意图为空中目标欲达到某种作战目的而采取的行动计划.本文在此定义目标意图是目标为了完成某一任务或者达到某一目的而采取的行动和计划. ...
Research on Recognition Technique of Vessel Tactical Intentions
0
2007
基于D-S证据理论的海战场目标战术意图识别技术研究
2
2012
... 从意图的基本内涵出发,文献[5-7]对目标意图定义为目标希望完成目的的基本打算和基本设想,其中基本打算指的是目标预定或计划想要完成的目标.结合军事背景,文献[8]定义目标意图是指敌方目标比较清楚地意识到要争取实现的目的和方法的需要,它通常以仅仅是设想而未付诸行动的企图和计划.限定战场空间,文献[9]定义空中目标的作战意图为空中目标欲达到某种作战目的而采取的行动计划.本文在此定义目标意图是目标为了完成某一任务或者达到某一目的而采取的行动和计划. ...
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
Study on Recognition Technique of Targets' Tactical Intentions in Sea Battlefield Based on D-S Evidence Theory
2
2012
... 从意图的基本内涵出发,文献[5-7]对目标意图定义为目标希望完成目的的基本打算和基本设想,其中基本打算指的是目标预定或计划想要完成的目标.结合军事背景,文献[8]定义目标意图是指敌方目标比较清楚地意识到要争取实现的目的和方法的需要,它通常以仅仅是设想而未付诸行动的企图和计划.限定战场空间,文献[9]定义空中目标的作战意图为空中目标欲达到某种作战目的而采取的行动计划.本文在此定义目标意图是目标为了完成某一任务或者达到某一目的而采取的行动和计划. ...
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
态势估计中目标意图识别的研究与实现
1
2012
... 从意图的基本内涵出发,文献[5-7]对目标意图定义为目标希望完成目的的基本打算和基本设想,其中基本打算指的是目标预定或计划想要完成的目标.结合军事背景,文献[8]定义目标意图是指敌方目标比较清楚地意识到要争取实现的目的和方法的需要,它通常以仅仅是设想而未付诸行动的企图和计划.限定战场空间,文献[9]定义空中目标的作战意图为空中目标欲达到某种作战目的而采取的行动计划.本文在此定义目标意图是目标为了完成某一任务或者达到某一目的而采取的行动和计划. ...
The Research and Implementation of Situation Assessment in the Target Intention Recognition
1
2012
... 从意图的基本内涵出发,文献[5-7]对目标意图定义为目标希望完成目的的基本打算和基本设想,其中基本打算指的是目标预定或计划想要完成的目标.结合军事背景,文献[8]定义目标意图是指敌方目标比较清楚地意识到要争取实现的目的和方法的需要,它通常以仅仅是设想而未付诸行动的企图和计划.限定战场空间,文献[9]定义空中目标的作战意图为空中目标欲达到某种作战目的而采取的行动计划.本文在此定义目标意图是目标为了完成某一任务或者达到某一目的而采取的行动和计划. ...
基于贝叶斯网络的空中目标作战企图识别研究
5
2008
... 从意图的基本内涵出发,文献[5-7]对目标意图定义为目标希望完成目的的基本打算和基本设想,其中基本打算指的是目标预定或计划想要完成的目标.结合军事背景,文献[8]定义目标意图是指敌方目标比较清楚地意识到要争取实现的目的和方法的需要,它通常以仅仅是设想而未付诸行动的企图和计划.限定战场空间,文献[9]定义空中目标的作战意图为空中目标欲达到某种作战目的而采取的行动计划.本文在此定义目标意图是目标为了完成某一任务或者达到某一目的而采取的行动和计划. ...
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... 表2是相关文献确定的意图空间情况.从表中可以看出,当前研究主要从敌机可能执行的作战任务考虑确定了意图空间.此外,文献[9,18,23,31]在构建意图空间时还将我机、民航、无威胁和其他意图等因素纳入考虑范围.当前相关文献确定的意图空间已经基本涵盖了空中目标可能执行的任务.但是随着战术战法的不断优化升级,可能出现新的目标任务.因此,研究者需要时刻掌握敌方最新战术战法动态,同时结合战场背景,不断动态调整空中目标的意图空间. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
Research on Air Target Combat Intention Inference Based on Bayesian Network
5
2008
... 从意图的基本内涵出发,文献[5-7]对目标意图定义为目标希望完成目的的基本打算和基本设想,其中基本打算指的是目标预定或计划想要完成的目标.结合军事背景,文献[8]定义目标意图是指敌方目标比较清楚地意识到要争取实现的目的和方法的需要,它通常以仅仅是设想而未付诸行动的企图和计划.限定战场空间,文献[9]定义空中目标的作战意图为空中目标欲达到某种作战目的而采取的行动计划.本文在此定义目标意图是目标为了完成某一任务或者达到某一目的而采取的行动和计划. ...
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... 表2是相关文献确定的意图空间情况.从表中可以看出,当前研究主要从敌机可能执行的作战任务考虑确定了意图空间.此外,文献[9,18,23,31]在构建意图空间时还将我机、民航、无威胁和其他意图等因素纳入考虑范围.当前相关文献确定的意图空间已经基本涵盖了空中目标可能执行的任务.但是随着战术战法的不断优化升级,可能出现新的目标任务.因此,研究者需要时刻掌握敌方最新战术战法动态,同时结合战场背景,不断动态调整空中目标的意图空间. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
对敌战场意图识别的若干问题
1
2004
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
Some Problems for Intention Assessment to Foe in Battle-Field
1
2004
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
面向计算机生成兵力的意图识别建模与推理方法研究
1
2016
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
Research on Modeling and Inference of CGF-Oriented Intention Recognition
1
2016
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
基于贝叶斯网络的空中目标意图识别方法
2
2012
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
Intention Assessment to Aerial Target Based on Bayesian Network
2
2012
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
基于模糊动态贝叶斯网空战敌方作战企图识别
2
2013
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
Foe Intention Inference in Air Combat Based on Fuzzy Dynamic Bayesian Network
2
2013
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
海上目标战术意图序贯识别技术研究
2
2008
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
Study on Sequential Recognition Technique of Marine Targets' Tactical Intentions
2
2008
... 从广义上讲,文献[10]定义意图识别是指对各种信息源得到的信息进行分析,来解释和判断对方所要达到的目的、设想和打算;文献[11]进一步明确了信息来源,定义意图识别是指依据对客观世界和识别对象的已有认识,通过观察智能体的动作序列及动作对自身和环境状态的影响,判断智能体的行为及目的.从作战的角度出发,文献[12-13]定义对敌作战意图识别是指在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释.从战争层次的角度出发,文献[14]定义目标战术意图识别是根据目标实时数据与有关情况通报,以及作战双方作战规律与原则、兵力兵器特点、环境要素逐步推断目标作战企图的过程.从作战空间的角度出发,文献[9]定义空中目标的作战企图识别是结合空中态势、作战环境以及各种飞行器的战术使用特点,通过对空中目标所表现出的各种状态属性进行分析并判断其作战企图. ...
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
1
2007
... 目标意图识别是作战流程和战场态势评估中的重要一环.从作战流程的角度来看,判断并识别目标意图可以帮助指挥员制定应对敌方行为的策略与措施,为其决策提供辅助作用.从信息融合的角度来看,从各类传感器搜集多源数据到完成目标评估,已完成对目标位置、运动学参数、属性参数和身份的估计,至此需要基于上述工作对战场态势进行评估,主要通过分析战场环境,推断敌我双方兵力分布,并以此识别敌方的意图和行动计划[15]. ...
1
2007
... 目标意图识别是作战流程和战场态势评估中的重要一环.从作战流程的角度来看,判断并识别目标意图可以帮助指挥员制定应对敌方行为的策略与措施,为其决策提供辅助作用.从信息融合的角度来看,从各类传感器搜集多源数据到完成目标评估,已完成对目标位置、运动学参数、属性参数和身份的估计,至此需要基于上述工作对战场态势进行评估,主要通过分析战场环境,推断敌我双方兵力分布,并以此识别敌方的意图和行动计划[15]. ...
Introducing Intents to the OODA-Loop
1
2019
... OODA(observation, orientation, decision, action)环最初用于空战中,飞行员通过观察目标的状态,对敌机的行为作出判断,然后根据判断结果做决策并明确行动方案,最后执行行动[16],如图1所示.由于OODA环对于作战流程的准确描述,已被推广至全域作战中. ...
A GRU-Based Method for Predicting Intention of Aerial Targets
4
2021
... 目标在执行不同的作战任务时其不同的特征会存在一定的差异.例如,目标在执行进攻、预警、加油等任务时其飞行高度、飞行速度、航线形状会有所不同,在执行侦察、突防等任务时目标的传感器状态也各有差异[17].表1是相关文献选取的目标特征情况. ...
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... LSTM网络中包含输入门、遗忘门和输出门3种门结构,为了进一步降低其运算成本,众多学者采用仅包含更新门和输出门2种门结构的GRU(gated recurrent unit)网络识别目标意图.TENG等[17,24]提出一种基于GRU网络的目标意图识别,并引入双向控制和注意力机制提升识别的准确率.在此基础上,为了进一步挖掘目标深层特征,文献[26]又引入了时间卷积网络提取目标数据的特征.针对目标样本分布不平衡的问题,马钰棠等[22]提出了一种自适应边界合成少数过采样技术,在此基础上引入注意力机制并将其与BiGRU(bidirectional gated recurrent unit)网络相结合.相较于传统的RNN和LSTM网络,GRU作为一类结构简单、参数较少的网络,在处理目标时序数据方面更具优势.文献[73]实验对比了RNN,LSTM和GRU识别目标意图的性能,3种方法在测试集上的平均准确率分别为65.44%,86.94%和87.82%,平均运行时间分别为26.4,78.4和78.2 s,结果表明LSTM和GRU的意图识别性能显著高于RNN,而GRU能用几乎相同的时间成本获取高于LSTM的识别效果,但是从结果来看GRU的准确率仍有一定的提升空间,需要研究者根据目标意图识别的实际需求进一步改进算法模型. ...
基于深度神经网络的空中目标作战意图识别
4
2018
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... 表2是相关文献确定的意图空间情况.从表中可以看出,当前研究主要从敌机可能执行的作战任务考虑确定了意图空间.此外,文献[9,18,23,31]在构建意图空间时还将我机、民航、无威胁和其他意图等因素纳入考虑范围.当前相关文献确定的意图空间已经基本涵盖了空中目标可能执行的任务.但是随着战术战法的不断优化升级,可能出现新的目标任务.因此,研究者需要时刻掌握敌方最新战术战法动态,同时结合战场背景,不断动态调整空中目标的意图空间. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Combat Intention Recognition for Aerial Targets Based on Deep Neural Network
4
2018
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... 表2是相关文献确定的意图空间情况.从表中可以看出,当前研究主要从敌机可能执行的作战任务考虑确定了意图空间.此外,文献[9,18,23,31]在构建意图空间时还将我机、民航、无威胁和其他意图等因素纳入考虑范围.当前相关文献确定的意图空间已经基本涵盖了空中目标可能执行的任务.但是随着战术战法的不断优化升级,可能出现新的目标任务.因此,研究者需要时刻掌握敌方最新战术战法动态,同时结合战场背景,不断动态调整空中目标的意图空间. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
基于时序特征编码的目标战术意图识别算法
3
2016
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Tactical Intention Recognition Algorithm Based on Encoded Temporal Features
3
2016
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
非完备信息下无人机空战目标意图预测
3
2020
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
Prediction of Unmanned Aerial Vehicle Target Intention Under Incomplete Information
3
2020
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
基于模糊推理的空中目标意图识别
2
2020
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
Air Target Intention Recognition Based on Fuzzy Inference
2
2020
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
样本不平衡下的空中群组意图识别方法
3
2022
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... LSTM网络中包含输入门、遗忘门和输出门3种门结构,为了进一步降低其运算成本,众多学者采用仅包含更新门和输出门2种门结构的GRU(gated recurrent unit)网络识别目标意图.TENG等[17,24]提出一种基于GRU网络的目标意图识别,并引入双向控制和注意力机制提升识别的准确率.在此基础上,为了进一步挖掘目标深层特征,文献[26]又引入了时间卷积网络提取目标数据的特征.针对目标样本分布不平衡的问题,马钰棠等[22]提出了一种自适应边界合成少数过采样技术,在此基础上引入注意力机制并将其与BiGRU(bidirectional gated recurrent unit)网络相结合.相较于传统的RNN和LSTM网络,GRU作为一类结构简单、参数较少的网络,在处理目标时序数据方面更具优势.文献[73]实验对比了RNN,LSTM和GRU识别目标意图的性能,3种方法在测试集上的平均准确率分别为65.44%,86.94%和87.82%,平均运行时间分别为26.4,78.4和78.2 s,结果表明LSTM和GRU的意图识别性能显著高于RNN,而GRU能用几乎相同的时间成本获取高于LSTM的识别效果,但是从结果来看GRU的准确率仍有一定的提升空间,需要研究者根据目标意图识别的实际需求进一步改进算法模型. ...
Air Group Intention Recognition Method Under Imbalance Samples
3
2022
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... LSTM网络中包含输入门、遗忘门和输出门3种门结构,为了进一步降低其运算成本,众多学者采用仅包含更新门和输出门2种门结构的GRU(gated recurrent unit)网络识别目标意图.TENG等[17,24]提出一种基于GRU网络的目标意图识别,并引入双向控制和注意力机制提升识别的准确率.在此基础上,为了进一步挖掘目标深层特征,文献[26]又引入了时间卷积网络提取目标数据的特征.针对目标样本分布不平衡的问题,马钰棠等[22]提出了一种自适应边界合成少数过采样技术,在此基础上引入注意力机制并将其与BiGRU(bidirectional gated recurrent unit)网络相结合.相较于传统的RNN和LSTM网络,GRU作为一类结构简单、参数较少的网络,在处理目标时序数据方面更具优势.文献[73]实验对比了RNN,LSTM和GRU识别目标意图的性能,3种方法在测试集上的平均准确率分别为65.44%,86.94%和87.82%,平均运行时间分别为26.4,78.4和78.2 s,结果表明LSTM和GRU的意图识别性能显著高于RNN,而GRU能用几乎相同的时间成本获取高于LSTM的识别效果,但是从结果来看GRU的准确率仍有一定的提升空间,需要研究者根据目标意图识别的实际需求进一步改进算法模型. ...
Air Target Intention Recognition Based on Further Clustering and Sample Expansion
3
2018
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... 表2是相关文献确定的意图空间情况.从表中可以看出,当前研究主要从敌机可能执行的作战任务考虑确定了意图空间.此外,文献[9,18,23,31]在构建意图空间时还将我机、民航、无威胁和其他意图等因素纳入考虑范围.当前相关文献确定的意图空间已经基本涵盖了空中目标可能执行的任务.但是随着战术战法的不断优化升级,可能出现新的目标任务.因此,研究者需要时刻掌握敌方最新战术战法动态,同时结合战场背景,不断动态调整空中目标的意图空间. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
An Air Target Tactical Intention Recognition Model Based on Bidirectional GRU with Attention Mechanism
3
2021
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... LSTM网络中包含输入门、遗忘门和输出门3种门结构,为了进一步降低其运算成本,众多学者采用仅包含更新门和输出门2种门结构的GRU(gated recurrent unit)网络识别目标意图.TENG等[17,24]提出一种基于GRU网络的目标意图识别,并引入双向控制和注意力机制提升识别的准确率.在此基础上,为了进一步挖掘目标深层特征,文献[26]又引入了时间卷积网络提取目标数据的特征.针对目标样本分布不平衡的问题,马钰棠等[22]提出了一种自适应边界合成少数过采样技术,在此基础上引入注意力机制并将其与BiGRU(bidirectional gated recurrent unit)网络相结合.相较于传统的RNN和LSTM网络,GRU作为一类结构简单、参数较少的网络,在处理目标时序数据方面更具优势.文献[73]实验对比了RNN,LSTM和GRU识别目标意图的性能,3种方法在测试集上的平均准确率分别为65.44%,86.94%和87.82%,平均运行时间分别为26.4,78.4和78.2 s,结果表明LSTM和GRU的意图识别性能显著高于RNN,而GRU能用几乎相同的时间成本获取高于LSTM的识别效果,但是从结果来看GRU的准确率仍有一定的提升空间,需要研究者根据目标意图识别的实际需求进一步改进算法模型. ...
BiLSTM-Attention: 一种空中目标战术意图识别模型
2
2021
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
BiLSTM-Attention: An Air Target Tactical Intention Recognition Model
2
2021
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
Attention-TCN-BiGRU: An Air Target Combat Intention Recognition Model
3
2021
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
... LSTM网络中包含输入门、遗忘门和输出门3种门结构,为了进一步降低其运算成本,众多学者采用仅包含更新门和输出门2种门结构的GRU(gated recurrent unit)网络识别目标意图.TENG等[17,24]提出一种基于GRU网络的目标意图识别,并引入双向控制和注意力机制提升识别的准确率.在此基础上,为了进一步挖掘目标深层特征,文献[26]又引入了时间卷积网络提取目标数据的特征.针对目标样本分布不平衡的问题,马钰棠等[22]提出了一种自适应边界合成少数过采样技术,在此基础上引入注意力机制并将其与BiGRU(bidirectional gated recurrent unit)网络相结合.相较于传统的RNN和LSTM网络,GRU作为一类结构简单、参数较少的网络,在处理目标时序数据方面更具优势.文献[73]实验对比了RNN,LSTM和GRU识别目标意图的性能,3种方法在测试集上的平均准确率分别为65.44%,86.94%和87.82%,平均运行时间分别为26.4,78.4和78.2 s,结果表明LSTM和GRU的意图识别性能显著高于RNN,而GRU能用几乎相同的时间成本获取高于LSTM的识别效果,但是从结果来看GRU的准确率仍有一定的提升空间,需要研究者根据目标意图识别的实际需求进一步改进算法模型. ...
Dempster-Shafer证据理论在目标意图预测中的应用
1
2008
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
Application of Dempster-Shafer Evidence Theory in Target Intention Prediction
1
2008
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
改进加权D-S证据理论在目标意图预测中的应用
1
2009
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
Application of Dempster-Shafer Evidence Theory to Target Intention Prediction
1
2009
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
Information Entropy-Based Intention Prediction of Aerial Targets Under Uncertain and Incomplete Information
1
2020
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
Target Intention Inference Model Based on Variable Structure Bayesian Network
2
2009
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
Panoramic Convolutional Long Short-Term Memory Networks for Combat Intension Recognition of Aerial Targets
3
2020
... Target features selection
Table 1| 文献 | 特征数量 | 目标特征 |
|---|
| 文献[9] | 6 | 航向、距离、身份、机型、速度、高度 |
| 文献[17] | 16 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型 |
| 文献[18] | 11 | 飞行速度、高度、航向角、方位角、飞行加速度、雷达散射截面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答、机动类型 |
| 文献[19] | 7 | 飞行高度、速度、航向、重频、脉宽、载频、雷达散射截面积 |
| 文献[20] | 13 | 敌机速度、敌机高度、敌机加速度、航向角、方位角、我机速度、我机加速度、双方距离、对空雷达状态、对海雷达状态、干扰 、受干扰状态、机动类型 |
| 文献[21] | 5 | 速度、高度、距离、相对航向角、转向趋势 |
| 文献[22] | 11 | 速度、加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态 |
| 文献[23] | 5 | 方位角、距离、水平速度、航向角、高度 |
| 文献[24-25] | 17 | 敌机加速度、敌机高度、敌机速度、敌机空战能力因子、我机加速度、我机高度、我机速度、我机空战能力因子、航向角、方位角、距离、对空雷达状态、对海雷达状态、干扰状态、受干扰状态、机动类型、敌机类型 |
| 文献[26] | 12 | 距离、速度、雷达散射截面积、高度、方位角、航向角、加速度、作战效能因子、电子干扰状态、对空雷达状态、对地雷达状态、舆论分析 |
| 文献[27-28] | 3 | 速度、距离、方位角 |
| 文献[29] | 10 | 速度、高度、距离、航向角、方位角、机动类型、干扰状态、受干扰状态、对空雷达状态、对海雷达状态 |
| 文献[30] | 11 | 高度、敌我识别应答、目标类型、航向角、位置、加速度、对海雷达状态、对空雷达状态、速度、雷达散射截面积、目标战术类型 |
| 文献[31] | 9 | 方位角、距离、航向角、速度、高度、对空雷达状态、对地雷达状态、电子干扰状态、雷达散射截面积 |
从表1中可以看出,当前研究主要选取目标运动状态和传感器状态两大类特征作为意图识别的输入属性.从数据来源的角度区分,目标特征可以分为直接特征和间接特征.其中直接特征是各类信息源直接获取的目标属性,例如目标的速度、高度和位置等特征可以直接从传感器探测信息中获取;间接特征是将若干直接特征或目标自身属性经过映射得到的能够反映目标状态或能力的一类属性,例如目标的空战能力因子、加速度等.此外,从特征值类型的角度来看,可以将目标特征分为数值型特征和非数值型特征.例如,速度、高度、距离等可以用连续数值表示的特征即为数值型特征,对空雷达状态、对海雷达状态、机动类型等用状态空间表示的特征即为非数值型特征.但是,为了便于算法处理,一般需要将非数值型特征转换为指定数值表示.随着信息源的不断完善,研究者可以获取各类多源异构的空中目标数据.但是当前的研究仅限于处理结构化数据,具有一定的局限性. ...
... 表2是相关文献确定的意图空间情况.从表中可以看出,当前研究主要从敌机可能执行的作战任务考虑确定了意图空间.此外,文献[9,18,23,31]在构建意图空间时还将我机、民航、无威胁和其他意图等因素纳入考虑范围.当前相关文献确定的意图空间已经基本涵盖了空中目标可能执行的任务.但是随着战术战法的不断优化升级,可能出现新的目标任务.因此,研究者需要时刻掌握敌方最新战术战法动态,同时结合战场背景,不断动态调整空中目标的意图空间. ...
... Common intention space
Table 2| 文献 | 数量 | 意图空间 |
|---|
| 文献[9] | 6 | 侦察、攻击、支援、返航、我机、其他无威胁意图 |
| 文献[17,24-26] | 7 | 监视、侦察、佯攻、攻击、突防、撤退、电子干扰 |
| 文献[18,31] | 8 | 突防、攻击、电子干扰、运输、加油、民航飞行、预警探测、侦察 |
| 文献[19] | 7 | 侦察、监视、佯攻、攻击、突防、诱敌、撤退 |
| 文献[20] | 7 | 攻击、侦察、监视、佯攻、突防、防守、电子干扰 |
| 文献[21] | 4 | 攻击、突防、撤离、搜索 |
| 文献[22] | 6 | 攻击、佯攻、撤退、侦察、监视、电子干扰 |
| 文献[23] | 5 | 攻击、监视、侦察、搜索、其他 |
| 文献[30] | 5 | 攻击、侦察、护卫、运输、汇合 |
3 空中目标意图识别方法3.1 基于规则和模板匹配的意图识别方法规则和模板匹配的方法基于意图识别经验知识,将其转换为意图识别规则并构建识别模型.在识别意图时,将待测的目标模型与已构建的识别模型相匹配,最终识别得到该目标的意图. ...
直觉云推理及其在空中目标意图分析中的应用
1
2014
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
Intuitionistic Cloud Reasoning and Its Application in Aerial Target Intention Analysis
1
2014
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
基于置信规则库的防空目标意图识别方法
1
2017
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
Intension Identification in Air Defense Based on Belief Rule Base Expert System Under Expert Guidance
1
2017
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
基于置信规则库和证据推理的空中目标意图识别方法
1
2017
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
Aerial Target Intention Recognition Approach Based on Belief-Rule-Base and Evidential Reasoning
1
2017
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
空天态势推演与预测分析方法
1
2018
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
Aerospace Situation Evolving and Predicting Methods
1
2018
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
无人作战飞机自主空战战术动作的分层识别方法
1
2019
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
The Hierarchical Recognition Method of Autonomous Air Combat Tactical Action of Unmanned Combat Aircraft
1
2019
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
基于改进模糊置信规则的意图识别方法
1
2023
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
An Intention Recognition Method Based on Fuzzy Belief-Rule-Base
1
2023
... 规则和模板匹配是最早应用于目标意图识别的方法之一.此类方法使得目标意图识别从完全依靠人工向自动化迈进,并且将历史积累的意图识别经验、知识和逻辑进行归纳总结,对于推动目标意图识别的发展具有重要意义.黄洁等[32]为了解决目标意图识别中存在的不确定性问题,结合直觉模糊集合论和云模型提出了一种直觉云模型,保证推理模型能够准确描述确定、否定和犹豫等3种状态,最后根据专家知识构建规则库,实现对目标意图的直觉云推理,以此实现意图识别.但是仅根据专家知识构建规则库可能会造成主观偏差.此外,规则库的体量和意图识别的准确性一般呈正相关性,构建的规则越多越全面,可以提升识别的准确性,但同时也会加大工作量.和钰[33]和赵福均等[34]通过将专家知识和相关信息转换为规则,构建了一种置信规则库(belief rule base, BRB),并结合差分进化算法对BRB中的参数进行优化,最后将将数据输入BRB模型中推理识别目标意图.尹江丽等[35]通过分析态势评估的要素组成和意图识别逻辑流程,构建了意图识别模板,通过模板匹配的方法实现对敌方空天目标的意图识别.史浩宇等[36]针对无人机战术动作识别问题,建立分层识别模型,将无人机的战术动作拆分为基本动作和组合动作,其中组合动作是由若干个基本动作构成,通过模糊逻辑推理识别基本动作,然后通过模板匹配识别组合动作,这是一种将目标战术动作分解进而识别其作战意图的方法.王海滨等[37]针对意图识别中的不确定性问题,采用一种模糊置信规则的方法识别意图,该方法在小样本时具备一定优势. ...
1
1976
... D-S(Dempster-Shafer)证据理论是一种基于概率表示“不确定”和“不知道”的方法,通对所有意图识别证据赋予基本概率分配,得到意图空间中每个元素的信任区间,其中信任区间的下限是信任度,上限是似然度[38].D-S证据理论还对所有意图识别证据通过合成规则得到每种意图的可能概率. ...
基于贝叶斯网络和D-S证据理论的态势估计方法
1
2013
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
A Method of Situation Assessment Based on Bayesian Network and D-S Evidence Theory
1
2013
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
一种基于D-S证据理论的目标意图预测方法
1
2014
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
Method of Target Intention Prediction Based on D-S Evidence Theory
1
2014
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
接敌前基于D-S理论的空战意图预测
1
2016
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
Combat Intent Forecast Based on D-S Evidence Theory Before Contecting the Enermy
1
2016
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
改进高维数据相似度的目标意图识别方法
1
2017
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
Target Tactical Intention Recognition Method of Improved High-Dimensional Data Similarity
1
2017
... D-S证据理论针对模糊性的处理,以及多证据融合研判的优势,使其在目标意图识别方法中占有一席之地.吴海秀[39]利用D-S证据理论将多个传感器探测到的数据信息转换为证据,然后进行信息融合得到目标的意图,但是这种方法容易出现证据冲突的情况,为解决该问题又利用Dezert和Smarandache提出的HDSmP(Hierarchical DSm probability)转换方法降低证据的不确定性.该研究给出了目标意图识别时证据冲突的一种解决方法,但是比率分配因子的选取产生影响.周志强等[40]针对传统D-S证据理论中未考虑各证据权重的问题,提出了一种改进的D-S证据理论,在考虑各证据权重的基础上计算基本概率,然后融合证据,实现对弹道导弹的意图识别.上述基于D-S证据理论的目标意图识别均为单次识别,在时间上具有一定的滞后性.王小平等[41]针对接敌前目标意图识别问题,通过选取态势元素并分析对目标意图的影响,利用D-S证据理论实现对敌机意图的实时识别.此种方法需要针对每个采样点利用D-S证据理论识别当前时刻的目标意图,虽然在一定程度上实现了对目标意图的实时识别,但是不仅增大了运算量,也无法较好地关联前后时刻的目标信息.此外,文献[7,14,42]将相似度的概念与D-S证据理论相结合,通过从战场态势数据中提取目标特征并结合目标意图标准值计算相似度,然后利用D-S证据理论实现对目标意图的序贯识别. ...
贝叶斯网络的战场作战意图评估方法
1
2010
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
Assessment of Operational Intention in Battlefield Based on Bayesian Network
1
2010
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
基于贝叶斯推理的海战场空中目标意图分层识别方法
1
2018
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
Hierarchical Recognition Method of Hostile Air-Targets in Sea Battlefields Based on Bayesian Deduction
1
2018
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
State-of-the-Art of Intention Recognition and Its Use in Decision Making
1
2013
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
A Novel DBN-Based Intention Inference Algorithm for Warship Air Combat
1
2020
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
基于CIDBN的战术活动识别模型及在线精确推理
1
2020
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
Tactical Activity Recognition Model and Online Accurate Inference Based on CIDBN
1
2020
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
Air Target Combat Intention Identification Based on IE-DSBN
1
2020
... D-S证据理论虽然具备一定的不确定性推理和处理多源信息的能力,但是在意图识别中证据冲突的情况时有发生.针对此问题,贝叶斯网络作为一种具有因果逻辑推理,并且也能够处理多源信息的方法开始受到众多研究者的青睐.文献[12,43]通过构建贝叶斯网络识别目标意图,首先确定贝叶斯网络中的节点及其状态,其次根据作战知识和经验确定网络中各节点之间的关系,然后进行节点概率分配,最后推理得到目标的意图.上述文献采用传统的贝叶斯网络识别目标意图存在推理时间较长、效率低下的问题.杨璐等[44]针对此问题,根据指挥员识别意图的逻辑和各种意图的特点,提出了一种基于贝叶斯的意图分层识别方法,将攻击、掩护、侦察、监视和其他等5种意图分为两大类,分别是能够对己方产生战损的意图和几乎不会对己方产生战损的意图,将贝叶斯推理分为2层,第1层以两大类意图作为识别框架,第2层在此基础上识别目标的具体意图.但是,传统的贝叶斯网络未考虑网络中参数会随着时间的推移而变化[45],这会降低意图识别的准确性.因此,一些学者引入动态贝叶斯网络(dynamic Bayesian network, DBN)以弥补时间因素对推理网络的影响.XU等[46]构建了舰艇防空作战环境下的意图识别DBN模型,通过最大后验估计计算相邻时间片上的节点统计量得到DBN的转移概率,以此实现了贝叶斯网络动态识别目标意图.为了提升贝叶斯网络的模糊处理能力,余振翔等[13]提出了一种模糊动态贝叶斯网络,首选对目标属性构造不同的隶属函数,其次对观测值进行模糊分类,然后构建动态贝叶斯网络,并确定状态转移概率矩阵和条件概率矩阵,最后通过推理识别出目标的意图.贝叶斯网络通过构建信念网络实现逻辑推理,但是当网络中的元素或者层级过多时其推理效果就会大打折扣.国海峰等[47]在DBN的基础上,根据网络中各节点之间的上下文独立关系,构建了上下文独立动态贝叶斯网络,提升了目标战术活动识别的精度.此外,XU等[48]通过引入信息熵的概念,通过分析不同目标属性提供的有用信息量客观分配属性权重,再通过构建动态序列贝叶斯网络识别空中目标意图.这2种贝叶斯网络分别从信念网络的改进和属性权重的分配2个角度进行改进,提升了贝叶斯网络识别目标意图的效率. ...
UAV Behavior-Intention Estimation Method Based on 4-D Flight-Trajectory Prediction
1
2021
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
基于GASVM-HMM算法的飞行员操控意图识别
1
2023
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
Pilot Manipulation Intention Recognition Based on GASVM-HMM Algorithms
1
2023
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
Tactical Intention Recognition of Aerial Target Based on XGBoost Decision Tree
1
2018
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
基于决策树的海战场舰艇意图识别
1
2010
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
Naval Vessel Intention Recognition Based on Decision Tree
1
2010
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
Target Tactical Intention Recognition in Multiaircraft Cooperative Air Combat
1
2021
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
基于随机森林的目标意图识别
1
2022
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
Target Intention Recognition Based on Random Forest
1
2022
... 随着机器学习的不断发展,其展现了强大的数据学习和适应能力,对于处理目标数据具有较大优势.ZHANG等[49]首先采用遗传算法优化的支持向量回归(support vector egression, SVR)预测无人机的活动轨迹,然后识别无人机的活动意图并发出预警.目标的活动轨迹在一定程度上可以反映出其作战意图,上述方法以目标运动轨迹为意图识别的主要依据,为意图识别提供了一个新思路,但是若仅通过目标运动轨迹识别其意图,在复杂的作战背景下模型和结果的鲁棒性和可靠性较低.江佳运等[50]同样利用支持向量机(support vector machine, SVM)并与遗传算法(genetic algorithm, GA)进行结合改进,首先初步识别目标意图,然后再通过隐马尔可夫模型(hidden Markov model, HMM)最终识别其意图.这种双层识别模型虽然识别结果更加精准,但是由于整体模型层级较多,特别是遗传算法的引入,增大了模型的运算量.目标意图识别作为一种典型的决策问题,部分学者尝试利用决策树的方法解决问题.WANG等[51]提出了一种基于XGBoost决策树的目标意图识别方法,通过将目标的飞行高度、飞行速度等特征值输入到决策树模型中识别目标的作战意图.牛晓博等[52]通过对以往目标意图识别经验的学习,采用信息熵理论建立意图识别决策树,并且通过对舰艇意图识别历史数据的分析,将识别错误的元组更正后加入历史信息库,重新建立决策树,使该方法具有一定的自学能力.决策树具有较强的逻辑性,基于此类方法识别目标意图具有一定的可解释性.但是,由于决策树自身结构的限制,面对较为复杂的目标数据,该方法就容易出现过拟合的现象.为了解决决策树在目标意图识别领域遇到的难题,MENG等[53]从输入的目标数据入手,先通过SVM等方法对目标数据进行降维,以此选取出更高层次的特征,减少输入进决策树的数据量.胡智勇等[54]通过构建由多个决策树组成的随机森林识别目标意图,以此增强决策树处理目标数据的能力.当面对大量目标数据时上述2种方法依然存在性能短板. ...
Recognition of Combat Intention with Insufficient Expert Knowledge
1
2018
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
基于自适应神经模糊推理系统的空中目标意图预测
1
2014
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Aerial Target Intention Prediction Based on Adaptive Neuro-fuzzy Inference System
1
2014
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
基于目标意图的空空导弹智能制导与控制技术研究
0
2015
Air-to-Air Missile Intelligent Guiding And Control Based on Target Intention
0
2015
基于自适应神经网络模糊系统(ANFIS)的空中目标意图分类
0
2016
Classification of Air Target Intention Based on Adaptive Neural Network Fuzzy System (ANFIS)
0
2016
SAIRF: A Similarity Approach for Attack Intention Recognition Using Fuzzy Min-Max Neural Network
1
2018
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
基于径向基神经网络的侦察目标意图识别研究
1
2018
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Detection and Recognition of Air Targets by Unmanned Aerial Vehicle Based on RBF Neural Network
1
2018
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
面向空中目标作战意图分析的标准化全连接残差网络模型
1
2019
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Standardized Fully Connected Network and Residual Network Model for Combat Intention Analysis of Air Targets
1
2019
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
基于深度学习的战场态势高级理解模拟方法
1
2018
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Simulation Method of Battlefields Situation Senior Comprehension Based on Deep Learning
1
2018
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Intelligent Interaction Model for Battleship Control Based on the Fusion of Target Intention and Operator Emotion
1
2021
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
基于大数据处理的态势评估与威胁估计算法研究
1
2019
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Research of Situation Assessment and Threat Assessment Algorithms Based on Big Data Processing Technology
1
2019
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
融合注意力机制的战术意图智能识别模型研究
1
2021
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Research on Intelligent Recognition Model of Tactical Intent Combined with Attention Mechanism
1
2021
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
Intention Recognition of Aerial Target Based on Deep Learning
1
2024
... 当前,神经网络是意图识别领域中的研究热点,众多学者通过构建不同的网络模型实现对目标意图的识别.神经网络作为人工智能领域中使用范围最广泛的一类算法,可以通过学习战场态势数据中的映射关系得到最优网络,实现端对端的意图识别.文献[18,55]构建了一种深度神经网络识别空中目标作战意图,通过引入ReLU(rectified linear unit)激活函数和Adam优化算法加快网络模型的收敛速度并增强寻优能力,通过构建神经网络自动提取目标数据中的深层特征,以此识别其意图,避免了传统意图识别方法中依赖专家经验知识等问题.但这仅是神经网络在目标意图识别中的尝试性研究,验证了其可行性,并未针对目标意图识别中常见的一些实际问题进行探讨与研究.目标意图识别是根据已有信息推测判定其执行任务及其企图的过程,在推理过程中难免存在不确定性,文献[56-59]针对该问题结合模糊推理和神经网络,提出了一种自适应神经模糊推理网络,将输入神经网络的数据进行模糊化处理,以此训练网络,并通过误差反向传播的方法优化网络,最终识别目标意图.相较于D-S证据理论的方法,自适应神经模糊推理网络不仅能够自动学习提取目标数据中的深层特征,也具备一定的模糊推理能力.战场态势瞬息万变,针对目标数据动态变化的特点,欧薇等[19]提出了一种时序特征编码的方法,将战场态势数据按照时间序列形成时序数据集,并输入到构建的栈式自编码器中,通过学习训练识别目标意图.此种基于自编码神经网络识别目标意图的方法虽然是一种无监督学习,但是由于缺少数据驱动,其效果仍有提升空间.魏蔚等[60]针对无人机意图识别问题,引入了径向基神经网络,将输入的目标特征向量与中心向量之间的欧氏距离作为函数自变量,以径向基函数作为激活函数,迭代循环训练神经网络,最终识别空中目标意图.上述这些方法在战场态势数据量较大、网络模型隐藏层过多时容易发生梯度爆炸,为解决该问题,翟翔宇等[61]提出了一种标准化全连接残差网络识别目标意图,在多层全连接神经网络的基础上对输入每个隐藏层的数据进行标准化处理,并且对各层的残差块采用跳跃连接.不同于上述方法,朱丰等[62]将战场态势元素及其状态转换为图像矩阵,引入了卷积神经网络实现对目标的意图识别.WANG等[63]从目标信息中提取目标特征,并将其输入到深度神经网络模型中,以此获得目标的重要特征并识别目标的意图.上述各类神经网络处理目标时序数据能力较低.从长序列的目标数据中提取特征信息,从而实现其意图的识别是近来研究热点之一.不同于BP(back propagation)神经网络和卷积神经网络等,循环神经网络(recurrent neural network, RNN)及其变体可以学习长序列数据中的非线性.针对目标数据具有时序性的特点,一些学者利用循环神经网络及其变体识别目标意图.王晟[64]为了能够处理目标连续属性数据,搭建了RNN模型.该研究验证了循环神经网络在目标意图识别领域的可行性和有限性.为了更进一步提升循环神经网络的识别效果,赵佳欢等[65]在此基础上,考虑到数据量过多容易造成信息过载,结合注意力机制提升了意图识别的准确性.QU等[66]分别搭建了全连接神经网络、卷积神经网络和循环神经网络,结果证明在典型的2v2战斗场景中,3种网络模型的意图识别准确率分别达到60%,65%和80%,由此可见RNN在处理目标长序列时的表现仍有提升空间. ...
战场对敌目标战术意图智能识别模型研究
1
2017
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
Study on the Intelligent Recognition Model of Enemy Target's Tactical Intention on Battlefield
1
2017
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
一种TensorFlow平台上目标意图识别模型设计与实现
0
2019
A Target Intent Recognition Model Designed and Implemented on TensorFlow Platform
0
2019
基于长短时神经网络的目标意图识别
1
2022
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
Identification of Target's Combat Intention Based on Long Short Term Memory Network
1
2022
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
基于机器学习的多源数据态势评估技术研究
1
2020
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
Research on Situation Assessment Technology of Multi-Source Data Based on Machine Learning
1
2020
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
基于注意力机制改进的LSTM空战目标意图识别方法
1
2023
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
An Air Combat Target Intention Recognition Method Based on LSTM Improved by Attention Mechanism
1
2023
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
An Information Fusion Method Based on Deep Learning and Fuzzy Discount-Weighting for Target Intention Recognition
1
2022
... 为了解决RNN只能处理目标时序数据中的短期依赖问题,文献[67-69]搭建既能处理短期依赖问题又能处理长期依赖问题的长短期记忆(long short-term memory, LSTM)网络识别目标意图.文献[70-71]在LSTM网络的基础上引入了注意力机制可以获取带权重的目标特征向量,从而提高目标特征学习的能力.仿真结果显示引入该机制后不仅提升了模型的收敛速度,而且目标意图识别的准确率也有所上升.但是单向的循环神经网络仅能利用之前时刻的目标数据,无法提取之后时刻目标数据的特征信息.在此基础上,滕飞等[25]用BiLSTM网络模型替换LSTM可以利用当前时刻前后的目标信息识别其意图.此外,针对目标数据不完备的情况,刘钻东等[20]先通过三次样条插值函数拟合和平均值填充目标数据,然后通过LSTM模型训练,识别目标意图,为目标数据缺失值的预处理提供了一种方法.上述研究均未考虑目标意图识别中的不确定性问题,ZHANG等[72]将神经网络与D-S证据理论相结合,首先通过LSTM网络获取目标意图识别的不确定信息,然后提出了一种模糊规则,以增强证据的可靠性,最后通过D-S证据理论得到了更合理的融合结果. ...
基于循环神经网络的集群意图识别方法研究
1
2019
... LSTM网络中包含输入门、遗忘门和输出门3种门结构,为了进一步降低其运算成本,众多学者采用仅包含更新门和输出门2种门结构的GRU(gated recurrent unit)网络识别目标意图.TENG等[17,24]提出一种基于GRU网络的目标意图识别,并引入双向控制和注意力机制提升识别的准确率.在此基础上,为了进一步挖掘目标深层特征,文献[26]又引入了时间卷积网络提取目标数据的特征.针对目标样本分布不平衡的问题,马钰棠等[22]提出了一种自适应边界合成少数过采样技术,在此基础上引入注意力机制并将其与BiGRU(bidirectional gated recurrent unit)网络相结合.相较于传统的RNN和LSTM网络,GRU作为一类结构简单、参数较少的网络,在处理目标时序数据方面更具优势.文献[73]实验对比了RNN,LSTM和GRU识别目标意图的性能,3种方法在测试集上的平均准确率分别为65.44%,86.94%和87.82%,平均运行时间分别为26.4,78.4和78.2 s,结果表明LSTM和GRU的意图识别性能显著高于RNN,而GRU能用几乎相同的时间成本获取高于LSTM的识别效果,但是从结果来看GRU的准确率仍有一定的提升空间,需要研究者根据目标意图识别的实际需求进一步改进算法模型. ...
Research on Cluster Intention Recognition Method Based on Recurrent Neural Network
1
2019
... LSTM网络中包含输入门、遗忘门和输出门3种门结构,为了进一步降低其运算成本,众多学者采用仅包含更新门和输出门2种门结构的GRU(gated recurrent unit)网络识别目标意图.TENG等[17,24]提出一种基于GRU网络的目标意图识别,并引入双向控制和注意力机制提升识别的准确率.在此基础上,为了进一步挖掘目标深层特征,文献[26]又引入了时间卷积网络提取目标数据的特征.针对目标样本分布不平衡的问题,马钰棠等[22]提出了一种自适应边界合成少数过采样技术,在此基础上引入注意力机制并将其与BiGRU(bidirectional gated recurrent unit)网络相结合.相较于传统的RNN和LSTM网络,GRU作为一类结构简单、参数较少的网络,在处理目标时序数据方面更具优势.文献[73]实验对比了RNN,LSTM和GRU识别目标意图的性能,3种方法在测试集上的平均准确率分别为65.44%,86.94%和87.82%,平均运行时间分别为26.4,78.4和78.2 s,结果表明LSTM和GRU的意图识别性能显著高于RNN,而GRU能用几乎相同的时间成本获取高于LSTM的识别效果,但是从结果来看GRU的准确率仍有一定的提升空间,需要研究者根据目标意图识别的实际需求进一步改进算法模型. ...



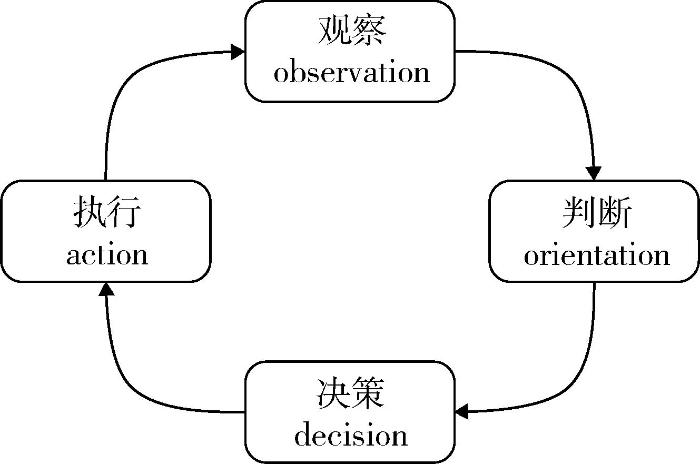
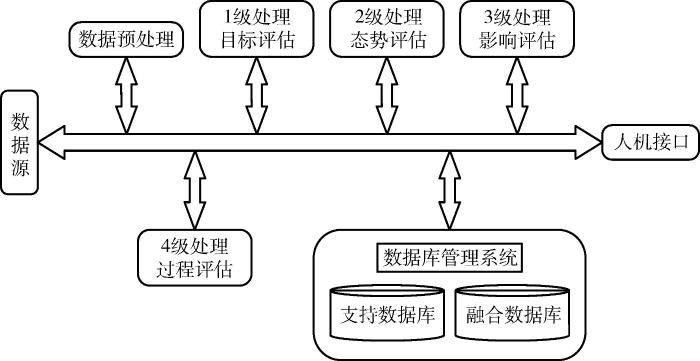


{kind=link}
{kind=link}
{kind=link}
{kind=link}