空天目标雷达智能识别仿真系统设计与实现
艾小锋 , 1 , 吴静 , 1 , 张静克 2 , 朱义奇 1 , 徐志明 1 , 吴其华 1
1.国防科技大学 电子科学学院,湖南 长沙 410073
2.电子信息系统复杂电磁环境效应国家重点实验室,河南 洛阳 471003
Design and Implementation of Radar Intelligent Recognition Simulation System for Aerospace Targets
AI Xiaofeng , 1 , WU Jing , 1 , ZHANG Jingke 2 , ZHU Yiqi 1 , XU Zhiming 1 , WU Qihua 1
1.College of Electronic Science and Technology, National University of Defense Technology, Changsha 410073, China
2.State Key Laboratory of Complex Electromagnetic Environment Effects on Electronics and Information System, Luoyang 471003, China
通讯作者: 吴静(1998-),女,江西鄱阳人。博士生,研究方向为组网雷达数据融合、特征提取。 E-mail:763999965@qq.com
收稿日期: 2024-01-17
修回日期: 2024-04-08
基金资助:
国家自然科学基金 . 62071475 . 61890542
Received: 2024-01-17
Revised: 2024-04-08
作者简介 About authors
艾小锋(1983-),男,四川安岳人。副研究员,博士,研究方向为双基地雷达成像、特征提取。E-mail:anxifu2001@163.com
E-mail:anxifu2001@163.com 。
摘要
雷达智能识别方法训练、测试与评估通常需要构建大样本的数据集,如何快速获得有效的数据集是亟待解决的问题。分析了空天目标雷达智能识别系统应用场景,并结合应用需求给出了空天目标雷达智能识别仿真系统建设思路;采用组件化、模块化设计方法,设计空天目标雷达智能识别仿真系统框架,构建空天目标智能识别仿真系统,快速准确模拟空天目标电磁特性和动态回波,具有可扩展、可重构能力。仿真结果和初步应用表明,该系统可用于不同应用场景下空天目标雷达智能识别方法的测试与评估。
关键词:
空天目标 智能识别 目标特性 雷达回波仿真 组件化
Abstract
Training, testing, and evaluating radar intelligent recognition (RIR) methods usually require the construction of large datasets. Acquiring effective datasets efficiently is an urgent issue to be solved. The application scenarios of the RIR system for aerospace targets were analyzed first, and the construction idea of the RIR simulation system (RIRSS) for aerospace targets was given according to application demands. Then, the modular and component-based design methods were utilized to design the RIRSS framework for aerospace targets, and an intelligent recognition simulation system for aerospace targets was constructed, which could simulate the electromagnetic characteristics and dynamic echo of aerospace targets quickly and efficiently, with a scalable and reconfigurable capability. Simulation results and preliminary application show that this system can be used in the test and evaluation of the RIR method for aerospace targets in various scenarios.
Keywords:
aerospace target intelligent recognition target characteristics radar echo simulation component
本文引用格式
艾小锋, 吴静, 张静克, 朱义奇, 徐志明, 吴其华. 空天目标雷达智能识别仿真系统设计与实现 . 现代防御技术 [J], 2024, 52(2): 151-162 doi:10.3969/j.issn.1009-086x.2024.02.017
AI Xiaofeng. Design and Implementation of Radar Intelligent Recognition Simulation System for Aerospace Targets . Modern Defence Technology
0 引言
从仿真形式划分,雷达系统仿真可划分为功能级仿真、信号级仿真、射频注入式仿真、射频辐射式仿真等,雷达系统的数字仿真主要采用功能级仿真和信号级仿真2类方法[1 -2 ] 。功能级仿真只模拟信号的功率信息,不模拟信号处理流程中的细节问题,实现比较简单,但仿真粒度较粗,并且无法准确反映一些新型电子干扰,特别是欺骗性干扰对雷达系统的影响。信号级仿真模拟了雷达系统信号处理的全过程,仿真可信度高,同时也使得系统模型复杂、环节众多、仿真实时性较差。为满足不同层次的仿真需求,需要在对不同层次雷达电子战系统对抗仿真模型描述方法进行研究的基础上构建层次化的模型体系,包括不同应用目的、不同抽象等级、不同分辨率的模型及支持模型描述的规范的仿真模型标准。另外,将基于构件的软件复用技术应用于雷达系统仿真领域,可复用大量已有的仿真资源,同时将组件快速组装成一个特定需求的仿真系统。应用基于组件的模块化模型技术、标准性建模规则和编码标准,研究模型的结构、行为、描述方式、边界、对外接口关系,建立雷达电子战系统仿真的标准模型库,可满足不同层次和种类雷达系统典型仿真应用需要。
雷达目标识别技术经过几十年的发展,取得了重要进展[3 ] ,直接利用的数据包括回波信号、雷达散射截面(RCS)、高分辨一维距离像(HRRP)、合成孔径雷达(SAR)像、逆合成孔径雷达(ISAR)像及提取的各类特征等。文献[4 ]提出了一种基于一维距离像的连续多调频周期融合的目标识别方法,相较于单周期目标识别方法的识别率更高,稳定性更好。文献[5 ]提出了结合Cameron分解和融合简化核极限学习机的目标识别方法,提高了全极化HRRP目标识别性能。
近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] 。在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率。文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率。针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性。在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能。文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用。
上述雷达目标识别方法中多为数据驱动方法,然而数据驱动方法的性能十分依赖数据充分性和数据质量,数据增强方法通过扩充数据集,能够提升数据驱动模型在现有数据集上的识别率。其中,生成对抗网络(GAN)是一种广泛用于数据增强的深度生成模型。文献[14 ]将深度卷积生成网络(DCGAN)首次应用于生成雷达HRRP,能够改善训练数据不平衡时的低识别率问题。文献[15 ]提出了一种无监督的一次性生成方法来扩展数据集,能够应对非合作目标只有一个样本的极端情况。文献[16 ]提出了用于HRRP数据集扩充的一维基础生成对抗网络(BGAN)结构和条件生成对抗网络(CGAN)结构,分别在提升识别率和降低复杂度方面存在较好效果。
数据增强方法通常基于原有数据集进行数据扩充用于数据的训练,以提高目标识别率。而通过信号级仿真产生大数据样本,是基于目标的雷达特性生成数据集,是一条最高效、最可行的途径。为此,本文针对空天目标智能识别方法验证需求,采用组件化、模块化设计方法,设计空天目标智能识别仿真系统框架,高效快速模拟空天目标电磁特性和动态回波,构建空天目标雷达智能识别仿真系统,实现不同场景下雷达智能识别方法的仿真验证。
1 总体思路
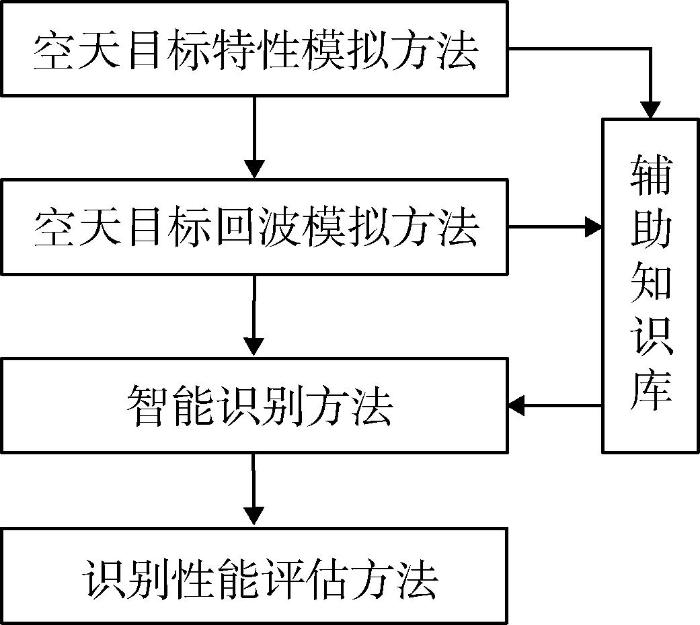
首先针对典型应用场景构设仿真场景,分析其中的雷达和目标类型,涉及的目标包括导弹、有人机、无人机等,涉及的传感器种类包括具有预警、搜索和跟踪等功能的雷达,针对传感器和目标的相互作用过程,开展相应的仿真系统框架设计。总体方案如图1 所示,总体结构如图2 所示。以空天目标的雷达特性仿真为基础,首先研究空天目标特性建模方法,然后研究动态回波模拟方法,其次设计标准化输入输出接口将特性数据和回波信号提供给外部智能识别算法库,再次基于目标雷达特征以及回波信号构成目标知识库,然后将雷达特征以及回波信号数据用于目标智能识别,最后,根据识别结果和场景参数对空天目标的识别算法进行性能评估,验证识别算法。
图1
图1
空天目标智能识别仿真系统构建总体方案
Fig. 1
Overall scheme of RIRSS for aerospace targets
图2
图2
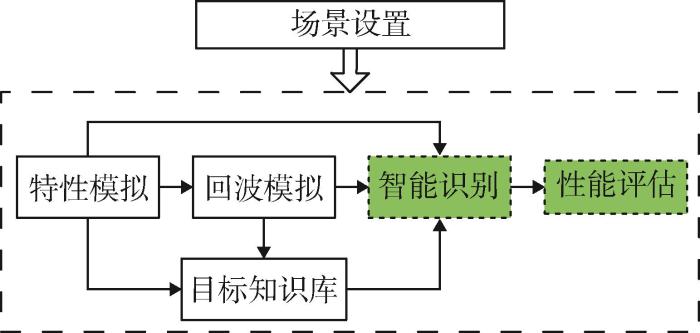
空天目标智能识别仿真系统总体结构
Fig. 2
Overall structure of RIRSS for aerospace targets
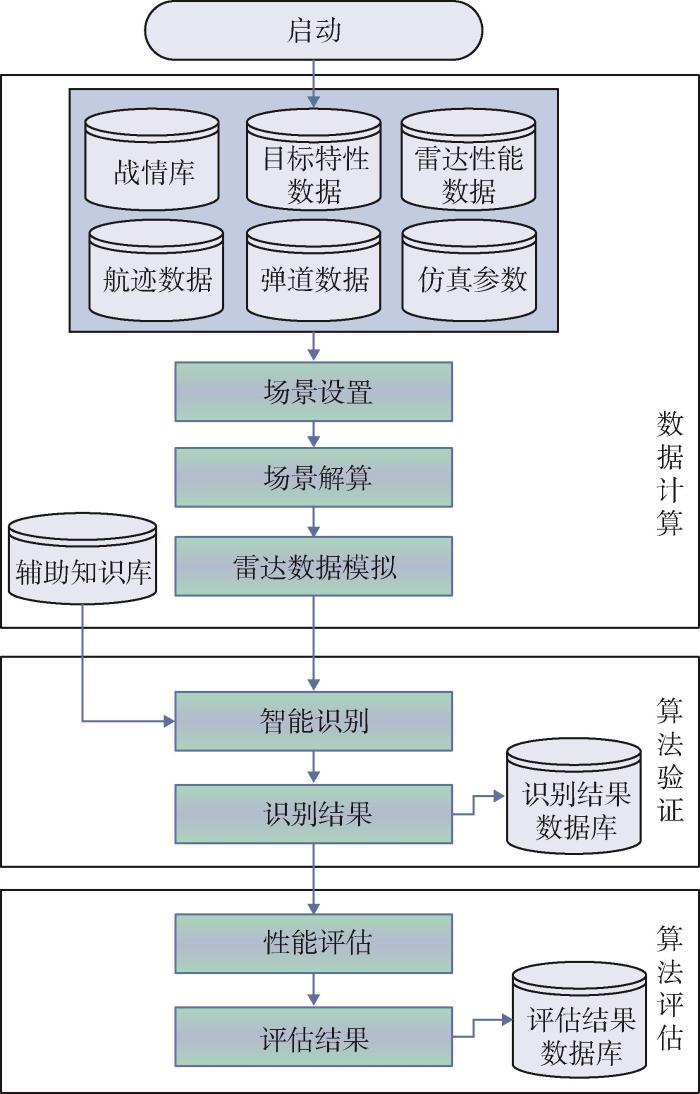
空天目标智能识别仿真系统由场景设置、特性模拟、回波模拟、智能识别、性能评估5个分系统及知识数据库构成。场景设置分系统:设置典型防空反导场景下的仿真参数、雷达、目标、干扰等装备参数,并控制仿真系统运行。目标特性模拟分系统:模拟雷达目标静态特性。目标回波模拟分系统:分别对雷达回波和光学特性数据进行处理,提取点迹/航迹、RCS、HRRP、极化、ISAR等特征。智能识别分系统:在经验数据学习基础上,利用静态特性数据或直接利用回波信号进行目标智能识别。性能评估分系统:根据场景数据和识别结果对智能识别分系统进行性能评估。系统运行流程如图3 所示,主要分为数据计算、算法验证、算法评估3个步骤。
图3
图3
空天目标智能识别仿真系统处理流程
Fig. 3
Processing flow of RIRSS for aerospace targets
2 空天目标智能识别仿真系统框架设计
空天目标智能识别仿真系统根据不同场景需求,由输入参数有机组合各组件算法构成模板,实现数据在分系统间的流通,输出识别和评估结果。下面分别给出组件划分、组件构建、组件内算法拓展和模板构建的基本流程设计。
2.1 组件划分
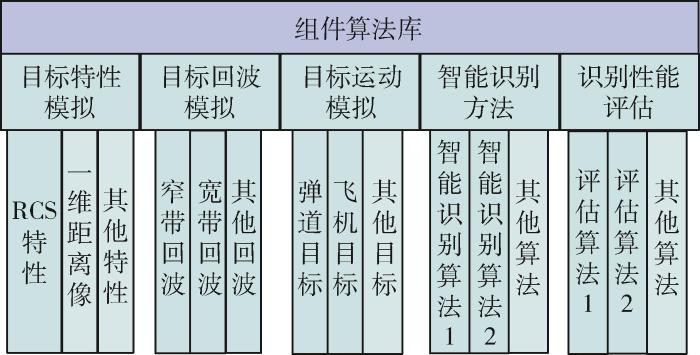
在空天目标智能识别仿真系统中,每个分系统相当于一个组件,由组件共同构成算法组件库。组件提供统一、规范的对外信息交互接口和控制接口。根据分系统所实现功能的不同,组件可划分为以下类别:目标特性模拟组件类、目标回波模拟组件类、目标运动模拟组件类、智能识别方法组件类、识别性能评估组件类等。组件库中的组件可以按照设定的接口扩展添加。各算法组件的组成框图如图4 所示。其中算法组件是算法的最小存在形式,用于实现算法组件级别的可重用与可扩展。
图4
图4
组件库
Fig. 4
Component library
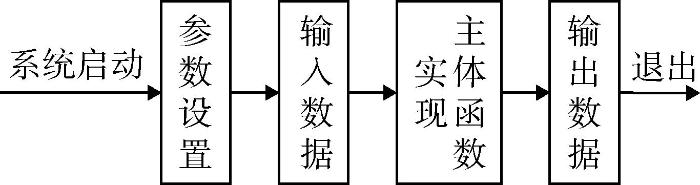
2.2 组件构建
每个组件构建基本上遵循相同流程:参数设置、输入输出接口设置和主体函数实现,如图5 所示。不同的组件参数与接口的类型、主体实现函数内容有所不同。
图5
图5
组件构建流程
Fig. 5
Component construction process
2.3 组件拓展
传统仿真系统将仿真过程视为一个整体,若要使用新的识别算法,则需新建系统,重新编写整体识别算法。而在组件化设计中,每个组件都完成目标识别过程中的部分功能,新增算法意味着只需在某个实现该算法功能的对应组件中加入该算法,并通过修改相关参数使其能够调用和选择,从而有效地参与数据的识别处理过程。组件外部接口不变,构建新算法相当于在相关组件中增加一种算法,通过参数选择使用的算法种类。该思想是在已有组件基础上新增算法,遵循如下拓展流程。
由于组件外部接口固定,若要在组件中拓展新算法,需要修改新算法内容使得算法的输入和输出与组件接口一致。
算法实现了对应分系统的功能,编写新算法即使用新的方法实现该功能。因此,修改接口后只需编写该部分的算法,而无需重复编写其他部分,体现了组件化设计下组件算法拓展的便捷性。
一个组件中可能存在多种可用算法,需要通过参数选择当前的模板使用该组件的何种算法。算法编写完成后,通过参数选择使新算法和原有算法一样能够被调用并参与识别。
2.4 模板构建
为了增强系统的兼容性,使其能够适应更多类型数据,需要构建不同模板。在组件化设计的系统中,可通过更改参数选择不同的组件算法生成不同类型的模板,而不用每次都重新建立模板编写模板中的每个处理步骤。该方法是在根据各组件构成的基础模板上更改组件算法,主要遵循如下拓展流程。
为了使得数据能够在模板的组件间正确流通,需要确保组件间的接口相互适配。
为了实现对模板中各组件中特定算法的调用,配置参数实现算法的选择和参数的取值。
新建模板依据空天目标智能仿真系统框架合理地组合各分系统组件,使得模板基于给定的输入能够输出正确的识别结果。
2.5 输入输出接口设计
输入接口主要为场景设置接口,主要功能为设置典型场景数据。具体包括:①仿真参数;②雷达参数;③自定义图谱格式;④天线方向图格式;⑤目标航迹数据;⑥目标参数;⑦干扰参数;⑧RCS数据格式;⑨电磁环境参数;⑩处理初始化参数。其中自定义图谱数据用来确定雷达工作频点信息。
输出接口包括雷达点迹数据接口、雷达航迹数据接口、回波数据输出接口和雷达散射截面(RCS)数据输出接口。点迹数据接口包括目标各个时刻的位置信息、速度信息、信噪比、幅度、RCS等。航迹数据接口主要包括目标各个时刻的位置信息、速度信息、信噪比、幅度、RCS等。回波数据输出接口主要用于输出生成的中频IQ数据。RCS数据输出接口主要用于输出生成的RCS数据。
3 空天目标雷达特性及动态回波模拟
空天目标雷达动态回波仿真组件包含2种算法:基于RCS起伏模型的点散射模型动态回波仿真方法;基于电磁仿真数据的动态回波仿真方法。
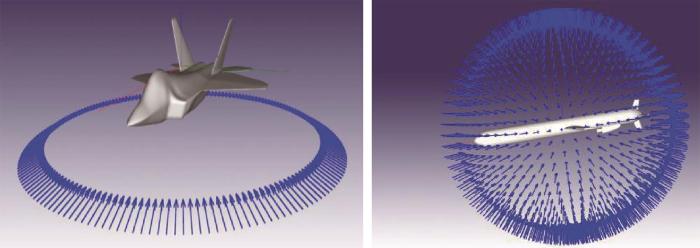
3.1 空天目标雷达特性模拟
采用经典RCS统计模型产生不同类型空天目标的RCS数据,对于典型空天目标,通过电磁计算、暗室测量等手段获得不同方位、俯仰条件的散射矩阵。通过查表的形式获得不同姿态下的散射特性数据。对于点目标模型,主要考虑RCS起伏,包括固定型、S w e r l i n g I S w e r l i n g I I S w e r l i n g I I I S w e r l i n g I V
另一方面,针对典型场景下的目标,建立相应的CAD模型,通过电磁计算获得目标在不同频率和视角下的RCS,HRRP和ISAR像,部分电磁计算模型如图6 所示。
图6
图6
电磁计算模型
Fig. 6
Electromagnetic calculation model
3.2 空天目标雷达动态回波仿真
点散射模型模拟主要完成对每个散射点回波信号的距离、速度、功率等信息的调制。飞机目标的点散射模型图7 所示。模拟的特性包括:①距离模拟,②速度模拟,③目标RCS起伏模拟。
图7
图7
飞机目标点散射模型
Fig. 7
Point scattering model of aircraft
动态回波仿真区别于静态电磁散射数据的机理包括:①目标运动引入的姿态角实时变化;②上升气流和侧向风导致的飞行姿态扰动;③振动效应:如晴空湍流导致的机翼颤振;④转动效应:如飞行控制方向舵自主转动;⑤形变效应:目标机动飞行机体结构变化。
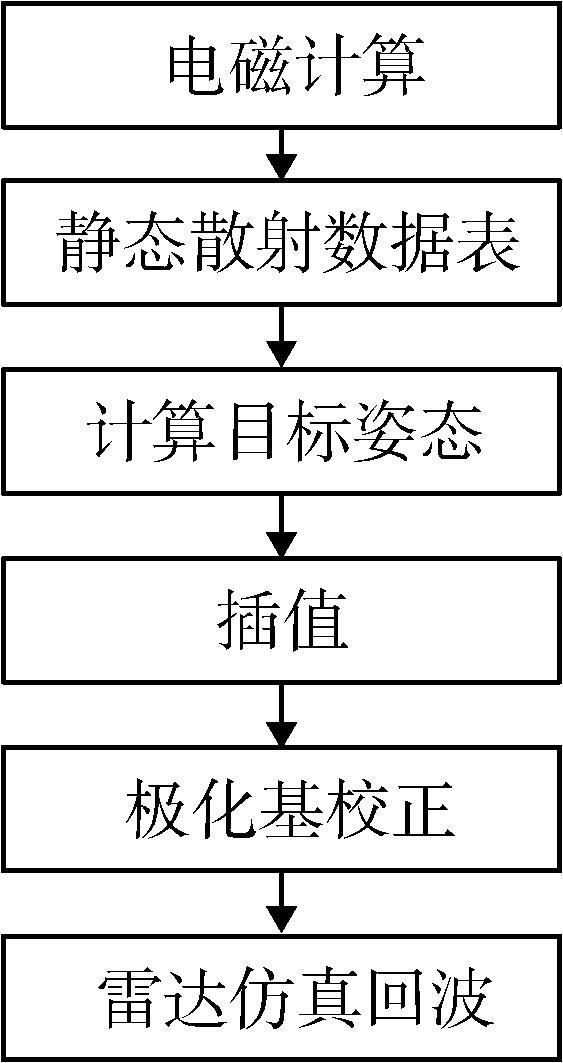
①~②是主要因素,它反映了目标运动时真实的雷达特性。③~⑤是次要因素,如果选择合适的工作频段,振动、转动和形变效应引入的附加运动幅度小于波长量级,其影响可以忽略。
更为准确的回波仿真是基于电磁计算数据或暗室测量数据,图8 给出了基于电磁散射数据的动态回波仿真流程图。从图8 可以看出,空天目标雷达全极化动态回波仿真主要包含2个过程:①确定空天目标不同姿态下的散射矩阵;②极化坐标系校正,解决的是电磁计算坐标系与实际雷达测量坐标系的不一致性问题。
图8
图8
空天目标全极化回波仿真流程图
Fig. 8
Simulation flow of fully polarized echo
4 仿真验证与分析
为验证仿真系统的有效性,开展了不同场景下目标回波仿真验证,选取典型应用场景,通过场景软件设置相应的雷达、目标、仿真等参数,分别调用不同的组件,生成不同的回波数据。
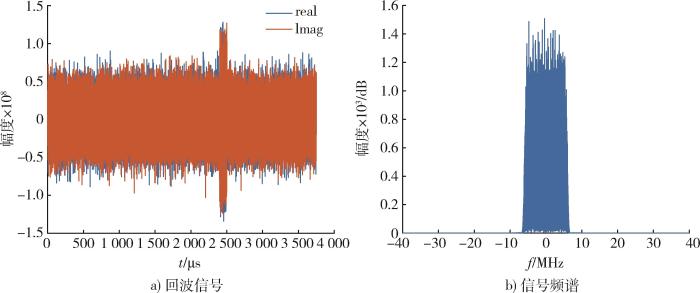
4.1 动态回波验证
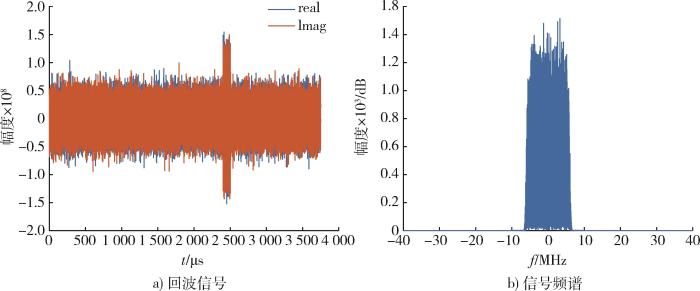
图9 ,10 为回波基带信号的时频域仿真结果示例,其中线性调频信号带宽和脉宽可以任意设置,相位编码信号码元宽度和数量可以在一定范围内选择。通过与Matlab产生的信号进行比对,验证了动态回波仿真的正确性。
图9
图9
线性调频基带信号
Fig. 9
Linear frequency modulation baseband signal
图10
图10
相位编码基带信号
Fig. 10
Phase encoding baseband signal
4.2 RCS特征验证
在空天目标智能识别仿真系统中设置一个目标,分别设置它的RCS起伏类型为Swerling I~ Swerling IV,然后调用相关组件生成回波信号。统计信号幅度分布并与Matlab产生的理论分布进行比较,由图11 得仿真结果与理论曲线吻合较好,验证了RCS特征仿真的正确性。
图11
图11
RCS特征验证
Fig. 11
RCS verification
4.3 成像特征验证
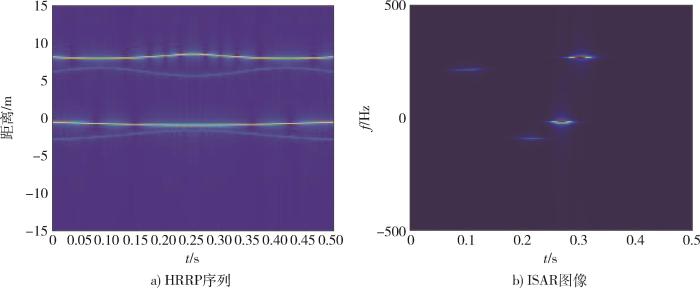
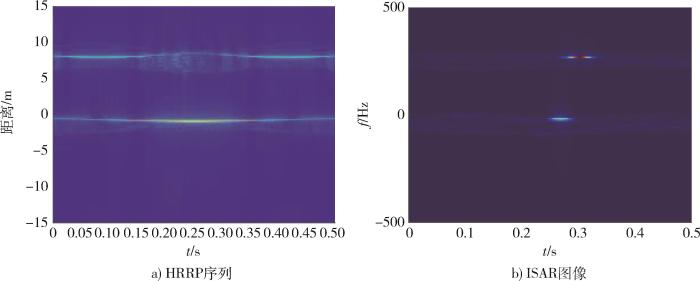
在空天目标智能识别仿真系统中设置不同的空天目标,一种采用散射中心模型,一种采用电磁计算数据。对于电磁计算数据,根据目标当前所处的观测角度查询对应的RCS,然后生成相应的动态回波,经过处理后获得目标一维距离像和二维ISAR像。以微动弹道目标仿真为例,图12 ,13 分别给出了利用散射中心模型和电磁计算数据的双弹头目标一维距离像序列和二维ISAR像。结果显示,2种算法得到的一维距离像序列随时间变化规律一致,均体现了弹头目标的微动特征。在ISAR成像结果中,基于散射中心模型的仿真结果出现了4个特显点,分别对应2个弹头目标的锥顶散射中心和锥底散射中心;而基于电磁计算数据的仿真结果仅出现了锥底散射中心的特显点,这是由于实际中锥顶散射中心的散射强度相对较弱。从对比来看,2类方法各有优势:散射中心模型算法运行速度快,可以较好地模拟目标的轮廓、纹理和运动等特性;电磁计算数据算法对机理的描述更加准确,但需要先验数据信息。在该算例中,2种算法得到ISAR图像的相似度和图像误差[17 ] 分别为90.32%和0.22%,均能够表征弹头目标的成像特征。针对不同的应用需求,用户可以合理选择适用的算法。
图12
图12
基于散射中心模型的成像结果
Fig. 12
Imaging results generated by scattering center model
图13
图13
基于电磁计算数据的成像结果
Fig. 13
Imaging results generated by electromagnetic calculation data
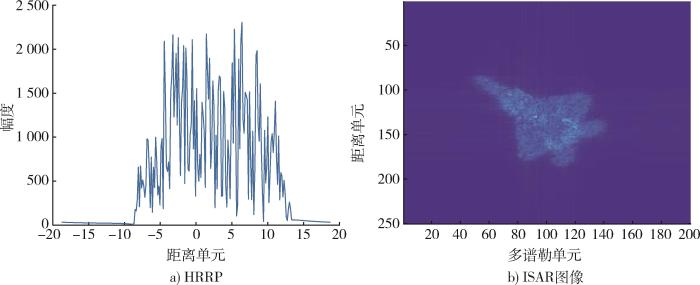
另一算例为隐身飞机成像结果,使用散射中心模型得到目标的一维距离像和ISAR成像结果如图14 所示。
图14
图14
隐身飞机成像结果
Fig. 14
Imaging results of stealth aircraft
4.4 智能识别方法验证
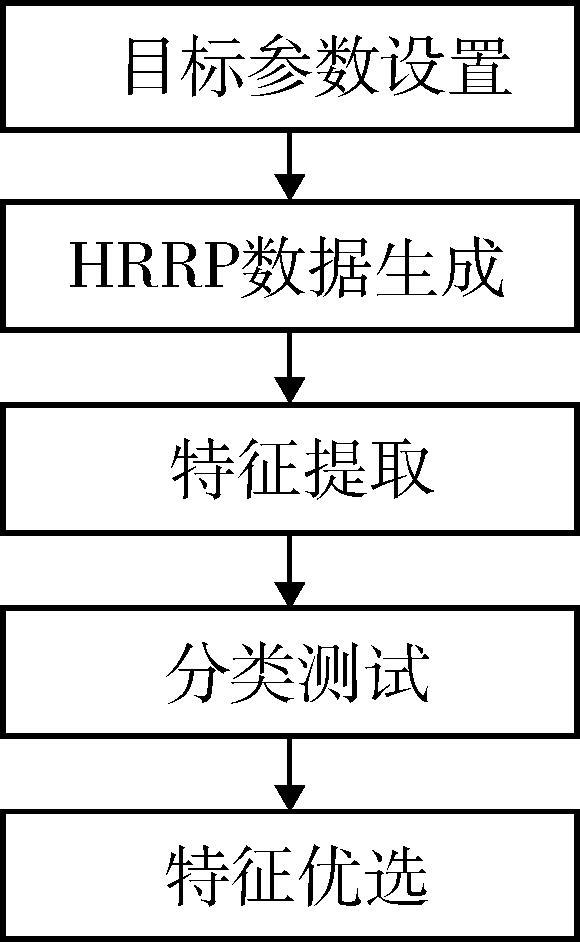
4.4.1 基于HRRP特征的识别方法验证
通过仿真系统产生一系列目标的一维距离像序列,采取外部特征提取与识别模块进行特征提取,包括幅度域直观特征(目标强散射中心数目)、中心距特征(幅度函数的一阶距、二阶矩和三阶矩)、双谱变换积分特征等,并按顺序将上述3类特征进行拼接,合成一维特征向量v v 图15 所示。
图15
图15
仿真验证实现步骤
Fig. 15
Simulation verification process
仿真数据集包含3类锥体目标,信噪比范围设为0~15 dB。3类目标的具体参数如表1 所示,不同目标的高度和底面半径的尺寸不同,并且在一定范围的运动参数内进行章动运动。宽带雷达的带宽为1 GHz,频点数为110。其中,数据集总大小为768,训练集占样本总数的70%,测试集占30%。
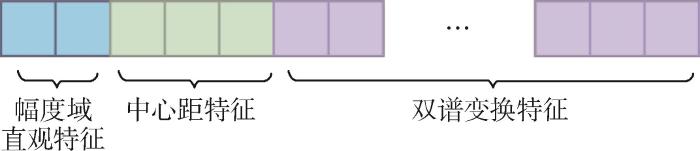
通过特征提取后,仿真数据集的合成特征向量长度为60。其中,前2个元素为幅度域直观特征,第3到第5个元素为中心距特征,其余为双谱变换积分特征,特征向量结构如图16 所示。
图16
图16
特征向量v
Fig. 16
Feature vector v
测试的方法为改进后的径向基核函数SVM(简称RBF-SVM),适用于空天目标多分类任务,具体实现步骤如下:
(1) 依据类别数训练对应个数的RBF-SVM(本次训练数据包含3类锥体目标,因此,RBF-SVM数目也为3),RBF-SVM编号对应样本类别(即,编号1的RBF-SVM正样本为第1类目标,其余目标为负样本)。
(2) 将测试集数据依次输入训练好的RBF-SVM,得出对应的分类结果以及距离分数d s c o r e d s c o r e d s c o r e
经过初步特征筛选,训练样本的特征向量v
考虑到基于相关统计量的Relief(relevant features)算法具有高运行效率的优点,变体Relief-F(基于KNN思想)继承了其优点,并且可解决多类别、多分量的特征优选问题。因此,本文选用Relief-F算法实现特征优选。Relief-F算法输出结果是各特征的重要性权重值,依据权重值大小,可将特征向量v v '
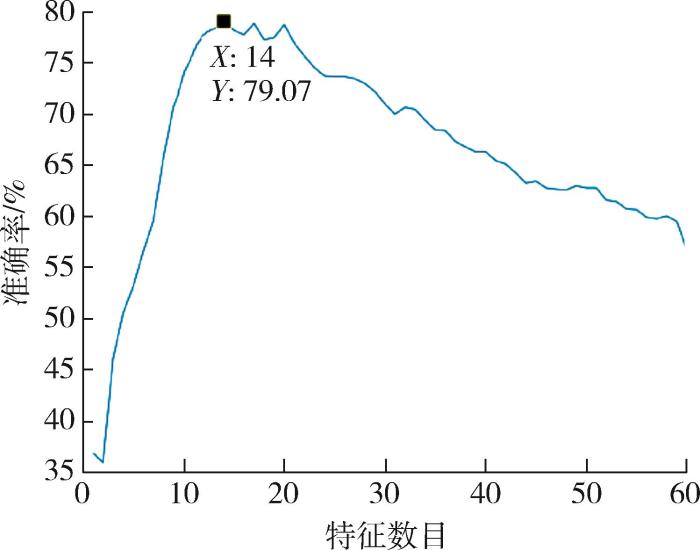
通过遍历测试集样本特征向量v ' 图17 。由图17 可知,前期随着特征不断加入,测试集准确度迅速上升,在选择特征数为14时达到最高。当选择特征数目超过20时,准确率逐渐下降。得出结论:在仿真数据集中,取v '
图17
图17
RBF-SVM特征向量v '
Fig. 17
Optimization results of RBF-SVM feature vectors
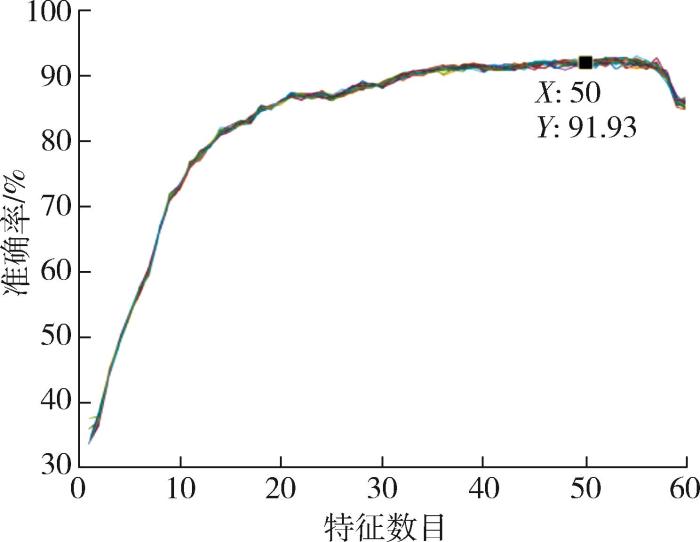
进一步地,分析特征优选方法与分类器性能之间的联系。RBF-SVM影响识别性能参数包括RBF类型和RBF核尺寸。本文中固定核函数为高斯径向基,故设计参数解耦为RBF核尺寸。具有自适应调整RBF核尺寸的高斯RBF-SVM(AGR-SVM)能缓解不同特征之间量级差距,可以有效地提升目标识别性能。但是,由于调整RBF核尺寸过程中存在一定随机性,考察AGR-SVM作为分类器对特征优选的影响时需要进行多次统计实验。图18 为AGR-SVM特征优选的20次实验结果。由图可知,各曲线间仅存在小程度起伏,AGR-SVM准确度提升至90%,并且,特征优选的范围得到拓宽。鉴于AGR-SVM优秀的识别准确率,可以确定选择基于AGR-SVM分类器的特征向量来筛选出相应优秀特征。
图18
图18
AGR-SVM特征优选
Fig. 18
Feature optimization of AGR-SVM
4.4.2 基于ISAR特征的识别方法验证
首先通过仿真系统产生宽带回波数据,进而获得空间目标ISAR像序列。空间目标由于结构设计的需要,成像结果同样呈现出散射点少的特点。因此,ISAR几何特征(周长、相对面积、长宽比、离散性、归一化质心坐标、转动惯量)将失去有效性。通过仿真系统产生ISAR图像序列,然后构建特征向量v s
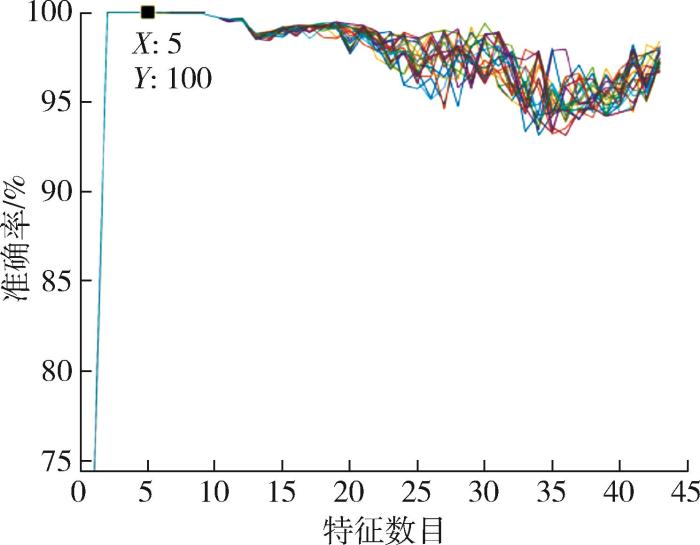
图19 为20次蒙特卡罗实验的AGR-SVM特征优选结果。该图表明相比于HRRP特征向量,不同类目标的ISAR特征向量之间具有更显著的差异性,大部分特征组合准确度皆达到90 %以上。但值得注意地,随着冗余特征加入各曲线间存在较大程度的随机起伏。鉴于特征优选数目为5个时,识别器准确率达到100 %,可以确定基于AGR-SVM分类器的有效ISAR特征向量,对应特征分别为Zernike矩幅度特征3、Zernike矩幅度特征1、Zernike矩幅度特征2、p-Zernike矩18、p-Zernike矩24。
图19
图19
AGR-SVM的ISAR特征优选结构
Fig. 19
ISAR feature optimization structure of AGR-SVM
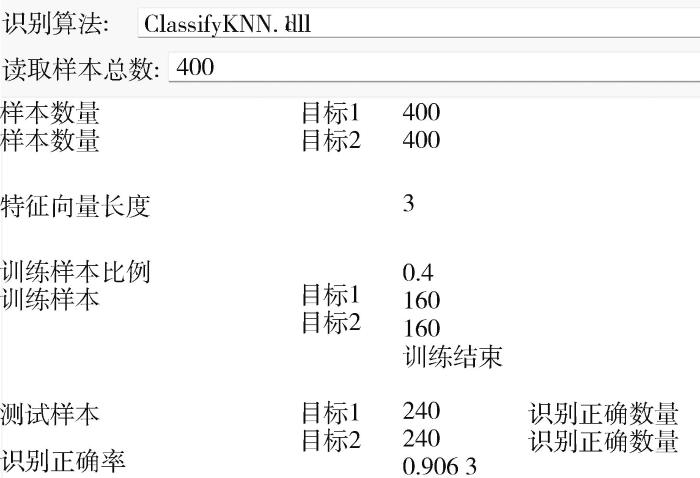
对两类空中目标的实测数据进行了优选特征提取与识别,识别结果如图20 所示。从结果中可以看出,优选的特征向量长度仅为3,但识别效果高于90%。
图 20
图 20
实测数据识别验证
Fig. 20
Recognition verification of measurement data
上述仿真示例表明,本文设计的仿真系统能够快速生成不同空天目标的雷达回波信号、HRRP、ISAR图像数据集,能用于雷达目标识别方法的测试验证和有效特征筛选等研究。
5 结束语
空天目标智能识别仿真系统内部包含对不同类型目标的回波特性模拟以及对不同智能识别算法的评估。为此,采用组件化的设计思路,将系统划分为多个具有高内聚、低耦合和可复用特性的组件,组合组件生成模板实现目标识别仿真整体流程。系统组件化的设计具有场景适应能力强,可拓展、可重构能力强,易于维护和研究等优点,有利于应对复杂多变的应用环境,是降低仿真系统复杂度、构建智能化系统的发展趋势。本文设计的仿真系统可以为空天目标智能识别系统设计和实现提供支撑,为空天目标智能识别系统性能评估及优化提供测试平台,为雷达目标反识别机理研究提供技术手段。
参考文献
View Option
[1]
肖顺平 , 冯德军 , 顾赵宇 , 等 雷达电子战系统仿真与评估 [M]. 北京 : 清华大学出版社 , 2023 .
[本文引用: 1]
XIAO Shunping FENG Dejun GU Zhaoyu et al Radar EW System Simulation and Evaluation [M]. Beijing : Tsinghua University Press , 2023 .
[本文引用: 1]
[2]
赵锋 , 艾小锋 , 刘进 , 等 组网雷达系统建模与仿真 [M]. 北京 : 电子工业出版社 , 2018 .
[本文引用: 1]
ZHAO Feng AI Xiaofeng LIU Jin et al Modeling and Simulation of Networked Radar Systems [M]. Beijing : Publishing House of Electronics Industry , 2018 .
[本文引用: 1]
[3]
胡卫东 , 杜小勇 , 张乐锋 , 等 雷达目标识别理论 [M]. 北京 : 国防工业出版社 , 2017 .
[本文引用: 1]
HU Weidong DU Xiaoyong ZHANG Lefeng et al Theory of Rodar Recognition [M]. Beijing : National Defense Industry Press , 2017 .
[本文引用: 1]
[4]
何子豪 , 冯靖凯 , 吴一凡 , 等 基于一维距离像的目标识别方法研究
[J]. 微波学报 , 2023 , 39 (增1 ): 244 -247 .
[本文引用: 1]
HE Zihao FENG Jingkai WU Yifan et al Research on Target Recognition Method Based on One-Dimensional Range Profile
[J]. Journal of Microwaves , 2023 , 39 (S1 ): 244 -247 .
[本文引用: 1]
[5]
王晶晶 , 刘峥 , 谢荣 , 等 联合Cameron分解和融合RKELM的全极化HRRP目标识别方法
[J]. 雷达学报 , 2021 , 10 (6 ): 944 -955 .
[本文引用: 1]
WANG Jingjing LIU Zheng XIE Rong et al HRRP Target Recognition Method for Full Polarimetric Radars by Combining Cameron Decomposition and Fusing RKELM
[J]. Journal of Radars , 2021 , 10 (6 ): 944 -955 .
[本文引用: 1]
[6]
孙浩 , 陈进 , 雷琳 , 等 深度卷积神经网络图像识别模型对抗鲁棒性技术综述
[J]. 雷达学报 , 2021 , 10 (4 ): 571 -594 .
[本文引用: 1]
SUN Hao CHEN Jin LEI Lin et al Adversarial Robustness of Deep Convolutional Neural Network-Based Image Recognition Models: A Review
[J]. Journal of Radars , 2021 , 10 (4 ): 571 -594 .
[本文引用: 1]
[7]
王国帅 , 汪文英 , 魏耀 , 等 基于混合核深度适配网络的HRRP目标识别
[J]. 雷达科学与技术 , 2020 , 18 (6 ): 618 -624 .
WANG Guoshuai WANG Wenying WEI Yao et al HRRP Target Recognition Based on Mixed Kernel Deep Adaptation Networks
[J]. Radar Science and Technology , 2020 , 18 (6 ): 618 -624 .
[8]
CHEN Jian DU Lan GUO Guanbo et al Target-Attentional CNN for Radar Automatic Target Recognition with HRRP
[J]. Signal Processing , 2022 , 196 : 108497 .
[本文引用: 1]
[9]
向前 , 王晓丹 , 宋亚飞 , 等 基于代价敏感剪枝卷积神经网络的弹道目标识别
[J]. 北京航空航天大学学报 , 2021 , 47 (11 ): 2387 -2398 .
[本文引用: 1]
XIANG Qian WANG Xiaodan SONG Yafei et al Ballistic Target Recognition Based on Cost-Sensitively Pruned Convolutional Neural Network
[J]. Journal of Beijing University of Aeronautics and Astronautics , 2021 , 47 (11 ): 2387 -2398 .
[本文引用: 1]
[10]
张国令 , 吴崇明 , 李睿 , 等 基于一维堆叠池化融合卷积自编码器的HRRP目标识别方法
[J]. 系统工程与电子技术 , 2021 , 43 (12 ): 3533 -3541 .
[本文引用: 1]
ZHANG Guoling WU Chongming LI Rui et al HRRP Target Recognition Method Based on One-Dimensional Stacked Pooling Fusion Convolutional Autoencoder
[J]. Systems Engineering and Electronics , 2021 , 43 (12 ): 3533 -3541 .
[本文引用: 1]
[11]
ZHANG Xianwen WEI Yao WANG Wenying Patch-Wise Autoencoder Based on Transformer for Radar High⁃Resolution Range Profile Target Recognition
[J]. IEEE Sensors Journal , 2023 , 23 (23 ): 29406 -29414 .
[本文引用: 1]
[12]
陈思伟 , 崔兴超 , 李铭典 , 等 基于深度CNN模型的SAR图像有源干扰类型识别方法
[J]. 雷达学报 , 2022 , 11 (5 ): 897 -908 .
[本文引用: 1]
CHEN Siwei CUI Xingchao LI Mingdian et al SAR Image Active Jamming Type Recognition Based on Deep CNN Model
[J]. Journal of Radars , 2022 , 11 (5 ): 897 -908 .
[本文引用: 1]
[13]
李妙歌 , 陈渤 , 王东升 , 等 面向SAR图像目标分类的CNN模型可视化方法
[J]. 雷达学报 , 2024 , 13 (2 ): 359 -373 .
[本文引用: 1]
LI Miaoge CHEN Bo WANG Dongsheng et al CNN Model Visualization Method for SAR Image Target Classification
[J]. Journal of Radars , 2024 , 13 (2 ): 359 -373 .
[本文引用: 1]
[14]
SONG Yiheng LI Yang WANG Yanhua et al Data Augmentation for Imbalanced HRRP Recognition Using Deep Convolutional Generative Adversarial Network
[J]. IEEE Access , 2020 , 8 : 201686 -201695 .
[本文引用: 1]
[15]
SHI Liangchao LIANG Zhehan WEN Yi et al One-Shot HRRP Generation for Radar Target Recognition
[J]. IEEE Geoscience and Remote Sensing Letters , 2022 , 19 : 1 -5 .
[本文引用: 1]
[16]
周强 , 王彦华 , 宋益恒 , 等 基于GAN的雷达HRRP数据增强方法
[J]. 信号处理 , 2022 , 38 (1 ): 92 -99 .
[本文引用: 1]
ZHOU Qiang WANG Yanhua SONG Yiheng et al Radar HRRP Data Enhancement Method Based on GAN
[J]. Journal of Signal Processing , 2022 , 38 (1 ): 92 -99 .
[本文引用: 1]
[17]
朱义奇 , 艾小锋 , 徐志明 , 等 空间微动多目标双基地雷达回波仿真方法
[J/OL]. 系统工程与电子技术 . (2023-10-25 ) [2024-01-09 ]. .
[本文引用: 1]
ZHU Yiqi AI Xiaofeng XU Zhiming et al Echo Simulation Method of Space Micro-motion Multi-targets in Bistatic Radar
[J/OL]. Systems Engineering and Electronics . (2023-10-25 ) [2024-01-09 ]. .
[本文引用: 1]
1
2023
... 从仿真形式划分,雷达系统仿真可划分为功能级仿真、信号级仿真、射频注入式仿真、射频辐射式仿真等,雷达系统的数字仿真主要采用功能级仿真和信号级仿真2类方法[1 -2 ] .功能级仿真只模拟信号的功率信息,不模拟信号处理流程中的细节问题,实现比较简单,但仿真粒度较粗,并且无法准确反映一些新型电子干扰,特别是欺骗性干扰对雷达系统的影响.信号级仿真模拟了雷达系统信号处理的全过程,仿真可信度高,同时也使得系统模型复杂、环节众多、仿真实时性较差.为满足不同层次的仿真需求,需要在对不同层次雷达电子战系统对抗仿真模型描述方法进行研究的基础上构建层次化的模型体系,包括不同应用目的、不同抽象等级、不同分辨率的模型及支持模型描述的规范的仿真模型标准.另外,将基于构件的软件复用技术应用于雷达系统仿真领域,可复用大量已有的仿真资源,同时将组件快速组装成一个特定需求的仿真系统.应用基于组件的模块化模型技术、标准性建模规则和编码标准,研究模型的结构、行为、描述方式、边界、对外接口关系,建立雷达电子战系统仿真的标准模型库,可满足不同层次和种类雷达系统典型仿真应用需要. ...
1
2023
... 从仿真形式划分,雷达系统仿真可划分为功能级仿真、信号级仿真、射频注入式仿真、射频辐射式仿真等,雷达系统的数字仿真主要采用功能级仿真和信号级仿真2类方法[1 -2 ] .功能级仿真只模拟信号的功率信息,不模拟信号处理流程中的细节问题,实现比较简单,但仿真粒度较粗,并且无法准确反映一些新型电子干扰,特别是欺骗性干扰对雷达系统的影响.信号级仿真模拟了雷达系统信号处理的全过程,仿真可信度高,同时也使得系统模型复杂、环节众多、仿真实时性较差.为满足不同层次的仿真需求,需要在对不同层次雷达电子战系统对抗仿真模型描述方法进行研究的基础上构建层次化的模型体系,包括不同应用目的、不同抽象等级、不同分辨率的模型及支持模型描述的规范的仿真模型标准.另外,将基于构件的软件复用技术应用于雷达系统仿真领域,可复用大量已有的仿真资源,同时将组件快速组装成一个特定需求的仿真系统.应用基于组件的模块化模型技术、标准性建模规则和编码标准,研究模型的结构、行为、描述方式、边界、对外接口关系,建立雷达电子战系统仿真的标准模型库,可满足不同层次和种类雷达系统典型仿真应用需要. ...
1
2018
... 从仿真形式划分,雷达系统仿真可划分为功能级仿真、信号级仿真、射频注入式仿真、射频辐射式仿真等,雷达系统的数字仿真主要采用功能级仿真和信号级仿真2类方法[1 -2 ] .功能级仿真只模拟信号的功率信息,不模拟信号处理流程中的细节问题,实现比较简单,但仿真粒度较粗,并且无法准确反映一些新型电子干扰,特别是欺骗性干扰对雷达系统的影响.信号级仿真模拟了雷达系统信号处理的全过程,仿真可信度高,同时也使得系统模型复杂、环节众多、仿真实时性较差.为满足不同层次的仿真需求,需要在对不同层次雷达电子战系统对抗仿真模型描述方法进行研究的基础上构建层次化的模型体系,包括不同应用目的、不同抽象等级、不同分辨率的模型及支持模型描述的规范的仿真模型标准.另外,将基于构件的软件复用技术应用于雷达系统仿真领域,可复用大量已有的仿真资源,同时将组件快速组装成一个特定需求的仿真系统.应用基于组件的模块化模型技术、标准性建模规则和编码标准,研究模型的结构、行为、描述方式、边界、对外接口关系,建立雷达电子战系统仿真的标准模型库,可满足不同层次和种类雷达系统典型仿真应用需要. ...
1
2018
... 从仿真形式划分,雷达系统仿真可划分为功能级仿真、信号级仿真、射频注入式仿真、射频辐射式仿真等,雷达系统的数字仿真主要采用功能级仿真和信号级仿真2类方法[1 -2 ] .功能级仿真只模拟信号的功率信息,不模拟信号处理流程中的细节问题,实现比较简单,但仿真粒度较粗,并且无法准确反映一些新型电子干扰,特别是欺骗性干扰对雷达系统的影响.信号级仿真模拟了雷达系统信号处理的全过程,仿真可信度高,同时也使得系统模型复杂、环节众多、仿真实时性较差.为满足不同层次的仿真需求,需要在对不同层次雷达电子战系统对抗仿真模型描述方法进行研究的基础上构建层次化的模型体系,包括不同应用目的、不同抽象等级、不同分辨率的模型及支持模型描述的规范的仿真模型标准.另外,将基于构件的软件复用技术应用于雷达系统仿真领域,可复用大量已有的仿真资源,同时将组件快速组装成一个特定需求的仿真系统.应用基于组件的模块化模型技术、标准性建模规则和编码标准,研究模型的结构、行为、描述方式、边界、对外接口关系,建立雷达电子战系统仿真的标准模型库,可满足不同层次和种类雷达系统典型仿真应用需要. ...
1
2017
... 雷达目标识别技术经过几十年的发展,取得了重要进展[3 ] ,直接利用的数据包括回波信号、雷达散射截面(RCS)、高分辨一维距离像(HRRP)、合成孔径雷达(SAR)像、逆合成孔径雷达(ISAR)像及提取的各类特征等.文献[4 ]提出了一种基于一维距离像的连续多调频周期融合的目标识别方法,相较于单周期目标识别方法的识别率更高,稳定性更好.文献[5 ]提出了结合Cameron分解和融合简化核极限学习机的目标识别方法,提高了全极化HRRP目标识别性能. ...
1
2017
... 雷达目标识别技术经过几十年的发展,取得了重要进展[3 ] ,直接利用的数据包括回波信号、雷达散射截面(RCS)、高分辨一维距离像(HRRP)、合成孔径雷达(SAR)像、逆合成孔径雷达(ISAR)像及提取的各类特征等.文献[4 ]提出了一种基于一维距离像的连续多调频周期融合的目标识别方法,相较于单周期目标识别方法的识别率更高,稳定性更好.文献[5 ]提出了结合Cameron分解和融合简化核极限学习机的目标识别方法,提高了全极化HRRP目标识别性能. ...
基于一维距离像的目标识别方法研究
1
2023
... 雷达目标识别技术经过几十年的发展,取得了重要进展[3 ] ,直接利用的数据包括回波信号、雷达散射截面(RCS)、高分辨一维距离像(HRRP)、合成孔径雷达(SAR)像、逆合成孔径雷达(ISAR)像及提取的各类特征等.文献[4 ]提出了一种基于一维距离像的连续多调频周期融合的目标识别方法,相较于单周期目标识别方法的识别率更高,稳定性更好.文献[5 ]提出了结合Cameron分解和融合简化核极限学习机的目标识别方法,提高了全极化HRRP目标识别性能. ...
Research on Target Recognition Method Based on One-Dimensional Range Profile
1
2023
... 雷达目标识别技术经过几十年的发展,取得了重要进展[3 ] ,直接利用的数据包括回波信号、雷达散射截面(RCS)、高分辨一维距离像(HRRP)、合成孔径雷达(SAR)像、逆合成孔径雷达(ISAR)像及提取的各类特征等.文献[4 ]提出了一种基于一维距离像的连续多调频周期融合的目标识别方法,相较于单周期目标识别方法的识别率更高,稳定性更好.文献[5 ]提出了结合Cameron分解和融合简化核极限学习机的目标识别方法,提高了全极化HRRP目标识别性能. ...
联合Cameron分解和融合RKELM的全极化HRRP目标识别方法
1
2021
... 雷达目标识别技术经过几十年的发展,取得了重要进展[3 ] ,直接利用的数据包括回波信号、雷达散射截面(RCS)、高分辨一维距离像(HRRP)、合成孔径雷达(SAR)像、逆合成孔径雷达(ISAR)像及提取的各类特征等.文献[4 ]提出了一种基于一维距离像的连续多调频周期融合的目标识别方法,相较于单周期目标识别方法的识别率更高,稳定性更好.文献[5 ]提出了结合Cameron分解和融合简化核极限学习机的目标识别方法,提高了全极化HRRP目标识别性能. ...
HRRP Target Recognition Method for Full Polarimetric Radars by Combining Cameron Decomposition and Fusing RKELM
1
2021
... 雷达目标识别技术经过几十年的发展,取得了重要进展[3 ] ,直接利用的数据包括回波信号、雷达散射截面(RCS)、高分辨一维距离像(HRRP)、合成孔径雷达(SAR)像、逆合成孔径雷达(ISAR)像及提取的各类特征等.文献[4 ]提出了一种基于一维距离像的连续多调频周期融合的目标识别方法,相较于单周期目标识别方法的识别率更高,稳定性更好.文献[5 ]提出了结合Cameron分解和融合简化核极限学习机的目标识别方法,提高了全极化HRRP目标识别性能. ...
深度卷积神经网络图像识别模型对抗鲁棒性技术综述
1
2021
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
Adversarial Robustness of Deep Convolutional Neural Network-Based Image Recognition Models: A Review
1
2021
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
基于混合核深度适配网络的HRRP目标识别
0
2020
HRRP Target Recognition Based on Mixed Kernel Deep Adaptation Networks
0
2020
Target-Attentional CNN for Radar Automatic Target Recognition with HRRP
1
2022
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
基于代价敏感剪枝卷积神经网络的弹道目标识别
1
2021
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
Ballistic Target Recognition Based on Cost-Sensitively Pruned Convolutional Neural Network
1
2021
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
基于一维堆叠池化融合卷积自编码器的HRRP目标识别方法
1
2021
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
HRRP Target Recognition Method Based on One-Dimensional Stacked Pooling Fusion Convolutional Autoencoder
1
2021
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
Patch-Wise Autoencoder Based on Transformer for Radar High?Resolution Range Profile Target Recognition
1
2023
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
基于深度CNN模型的SAR图像有源干扰类型识别方法
1
2022
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
SAR Image Active Jamming Type Recognition Based on Deep CNN Model
1
2022
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
面向SAR图像目标分类的CNN模型可视化方法
1
2024
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
CNN Model Visualization Method for SAR Image Target Classification
1
2024
... 近年来,深度学习理论取得了重大突破,在雷达目标识别领域掀起了一阵热潮[6 -8 ] .在基于HRRP的目标识别方面,文献[9 ]提出了基于代价敏感剪枝一维卷积神经网络(CNN)的弹道目标高分辨距离像识别方法,降低了弹道目标整体错误识别率.文献[10 ]提出了一种基于一维堆叠池化融合卷积自编码器的识别方法,提高了全极化HRRP目标识别准确率.针对识别中的距离平移敏感性和低信噪比干扰,文献[11 ]采用基于Transformer的多头注意机制,将数据块编码为潜在向量,消除距离平移的影响,提高了对噪声的鲁棒性.在基于SAR的目标识别方面,文献[12 ]提出了一种结合注意力机制的深度CNN模型用于SAR干扰类型识别,相比于传统深度CNN模型,该文方法取得了更高的识别精度和更稳健的性能.文献[13 ]从神经元特征提取能力和网络决策依据2个层面出发,提出了一种面向SAR图像的卷积神经网络模型可视化方法,有效拓展了卷积神经网络在SAR图像上的可视化应用. ...
Data Augmentation for Imbalanced HRRP Recognition Using Deep Convolutional Generative Adversarial Network
1
2020
... 上述雷达目标识别方法中多为数据驱动方法,然而数据驱动方法的性能十分依赖数据充分性和数据质量,数据增强方法通过扩充数据集,能够提升数据驱动模型在现有数据集上的识别率.其中,生成对抗网络(GAN)是一种广泛用于数据增强的深度生成模型.文献[14 ]将深度卷积生成网络(DCGAN)首次应用于生成雷达HRRP,能够改善训练数据不平衡时的低识别率问题.文献[15 ]提出了一种无监督的一次性生成方法来扩展数据集,能够应对非合作目标只有一个样本的极端情况.文献[16 ]提出了用于HRRP数据集扩充的一维基础生成对抗网络(BGAN)结构和条件生成对抗网络(CGAN)结构,分别在提升识别率和降低复杂度方面存在较好效果. ...
One-Shot HRRP Generation for Radar Target Recognition
1
2022
... 上述雷达目标识别方法中多为数据驱动方法,然而数据驱动方法的性能十分依赖数据充分性和数据质量,数据增强方法通过扩充数据集,能够提升数据驱动模型在现有数据集上的识别率.其中,生成对抗网络(GAN)是一种广泛用于数据增强的深度生成模型.文献[14 ]将深度卷积生成网络(DCGAN)首次应用于生成雷达HRRP,能够改善训练数据不平衡时的低识别率问题.文献[15 ]提出了一种无监督的一次性生成方法来扩展数据集,能够应对非合作目标只有一个样本的极端情况.文献[16 ]提出了用于HRRP数据集扩充的一维基础生成对抗网络(BGAN)结构和条件生成对抗网络(CGAN)结构,分别在提升识别率和降低复杂度方面存在较好效果. ...
基于GAN的雷达HRRP数据增强方法
1
2022
... 上述雷达目标识别方法中多为数据驱动方法,然而数据驱动方法的性能十分依赖数据充分性和数据质量,数据增强方法通过扩充数据集,能够提升数据驱动模型在现有数据集上的识别率.其中,生成对抗网络(GAN)是一种广泛用于数据增强的深度生成模型.文献[14 ]将深度卷积生成网络(DCGAN)首次应用于生成雷达HRRP,能够改善训练数据不平衡时的低识别率问题.文献[15 ]提出了一种无监督的一次性生成方法来扩展数据集,能够应对非合作目标只有一个样本的极端情况.文献[16 ]提出了用于HRRP数据集扩充的一维基础生成对抗网络(BGAN)结构和条件生成对抗网络(CGAN)结构,分别在提升识别率和降低复杂度方面存在较好效果. ...
Radar HRRP Data Enhancement Method Based on GAN
1
2022
... 上述雷达目标识别方法中多为数据驱动方法,然而数据驱动方法的性能十分依赖数据充分性和数据质量,数据增强方法通过扩充数据集,能够提升数据驱动模型在现有数据集上的识别率.其中,生成对抗网络(GAN)是一种广泛用于数据增强的深度生成模型.文献[14 ]将深度卷积生成网络(DCGAN)首次应用于生成雷达HRRP,能够改善训练数据不平衡时的低识别率问题.文献[15 ]提出了一种无监督的一次性生成方法来扩展数据集,能够应对非合作目标只有一个样本的极端情况.文献[16 ]提出了用于HRRP数据集扩充的一维基础生成对抗网络(BGAN)结构和条件生成对抗网络(CGAN)结构,分别在提升识别率和降低复杂度方面存在较好效果. ...
空间微动多目标双基地雷达回波仿真方法
1
... 在空天目标智能识别仿真系统中设置不同的空天目标,一种采用散射中心模型,一种采用电磁计算数据.对于电磁计算数据,根据目标当前所处的观测角度查询对应的RCS,然后生成相应的动态回波,经过处理后获得目标一维距离像和二维ISAR像.以微动弹道目标仿真为例,图12 ,13 分别给出了利用散射中心模型和电磁计算数据的双弹头目标一维距离像序列和二维ISAR像.结果显示,2种算法得到的一维距离像序列随时间变化规律一致,均体现了弹头目标的微动特征.在ISAR成像结果中,基于散射中心模型的仿真结果出现了4个特显点,分别对应2个弹头目标的锥顶散射中心和锥底散射中心;而基于电磁计算数据的仿真结果仅出现了锥底散射中心的特显点,这是由于实际中锥顶散射中心的散射强度相对较弱.从对比来看,2类方法各有优势:散射中心模型算法运行速度快,可以较好地模拟目标的轮廓、纹理和运动等特性;电磁计算数据算法对机理的描述更加准确,但需要先验数据信息.在该算例中,2种算法得到ISAR图像的相似度和图像误差[17 ] 分别为90.32%和0.22%,均能够表征弹头目标的成像特征.针对不同的应用需求,用户可以合理选择适用的算法. ...
Echo Simulation Method of Space Micro-motion Multi-targets in Bistatic Radar
1
... 在空天目标智能识别仿真系统中设置不同的空天目标,一种采用散射中心模型,一种采用电磁计算数据.对于电磁计算数据,根据目标当前所处的观测角度查询对应的RCS,然后生成相应的动态回波,经过处理后获得目标一维距离像和二维ISAR像.以微动弹道目标仿真为例,图12 ,13 分别给出了利用散射中心模型和电磁计算数据的双弹头目标一维距离像序列和二维ISAR像.结果显示,2种算法得到的一维距离像序列随时间变化规律一致,均体现了弹头目标的微动特征.在ISAR成像结果中,基于散射中心模型的仿真结果出现了4个特显点,分别对应2个弹头目标的锥顶散射中心和锥底散射中心;而基于电磁计算数据的仿真结果仅出现了锥底散射中心的特显点,这是由于实际中锥顶散射中心的散射强度相对较弱.从对比来看,2类方法各有优势:散射中心模型算法运行速度快,可以较好地模拟目标的轮廓、纹理和运动等特性;电磁计算数据算法对机理的描述更加准确,但需要先验数据信息.在该算例中,2种算法得到ISAR图像的相似度和图像误差[17 ] 分别为90.32%和0.22%,均能够表征弹头目标的成像特征.针对不同的应用需求,用户可以合理选择适用的算法. ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}