

现代防御技术 ›› 2023, Vol. 51 ›› Issue (4): 25-35.DOI: 10.3969/j.issn.1009-086x.2023.04.004
收稿日期:2022-06-21
修回日期:2023-03-03
出版日期:2023-08-28
发布日期:2023-09-01
作者简介:曾观林(1995-),男,广西容县人。硕士生,研究方向为水下组合导航。
Received:2022-06-21
Revised:2023-03-03
Online:2023-08-28
Published:2023-09-01
摘要:
为实现水下潜航器高精度长航时航行,基于SINS/DVL组合导航的误差抑制和校正技术是关键。对于DVL数据失效情况,介绍了不同的替代方法。比较了SINS/DVL组合数据融合常见滤波算法;从长航时导航误差抑制和校正角度,叙述了阻尼算法、地形辅助校正、重力匹配辅助定位、长基线系统辅助定位和重力扰动补偿等方法。可为水下潜航器SINS/DVL组合长航时导航误差抑制提供参考。
中图分类号:
曾观林, 冯国虎. 水下SINS/DVL组合导航误差抑制综述[J]. 现代防御技术, 2023, 51(4): 25-35.
Guanlin ZENG, Guohu FENG. Review on the Error Suppression of Underwater SINS/DVL Integrated Navigation[J]. Modern Defense Technology, 2023, 51(4): 25-35.
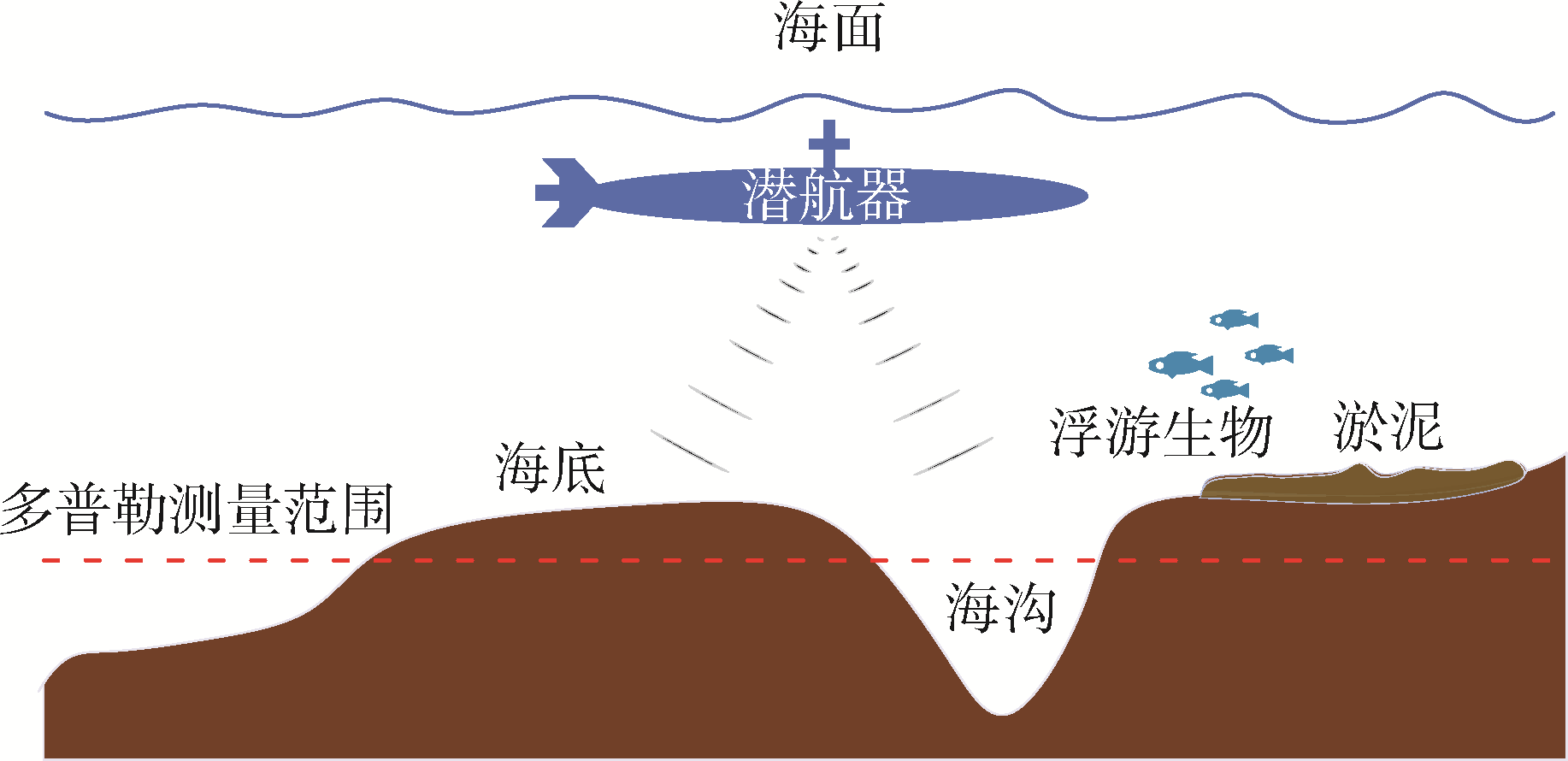
图1 DVL失效情形
Fig. 1 DVL failure condition
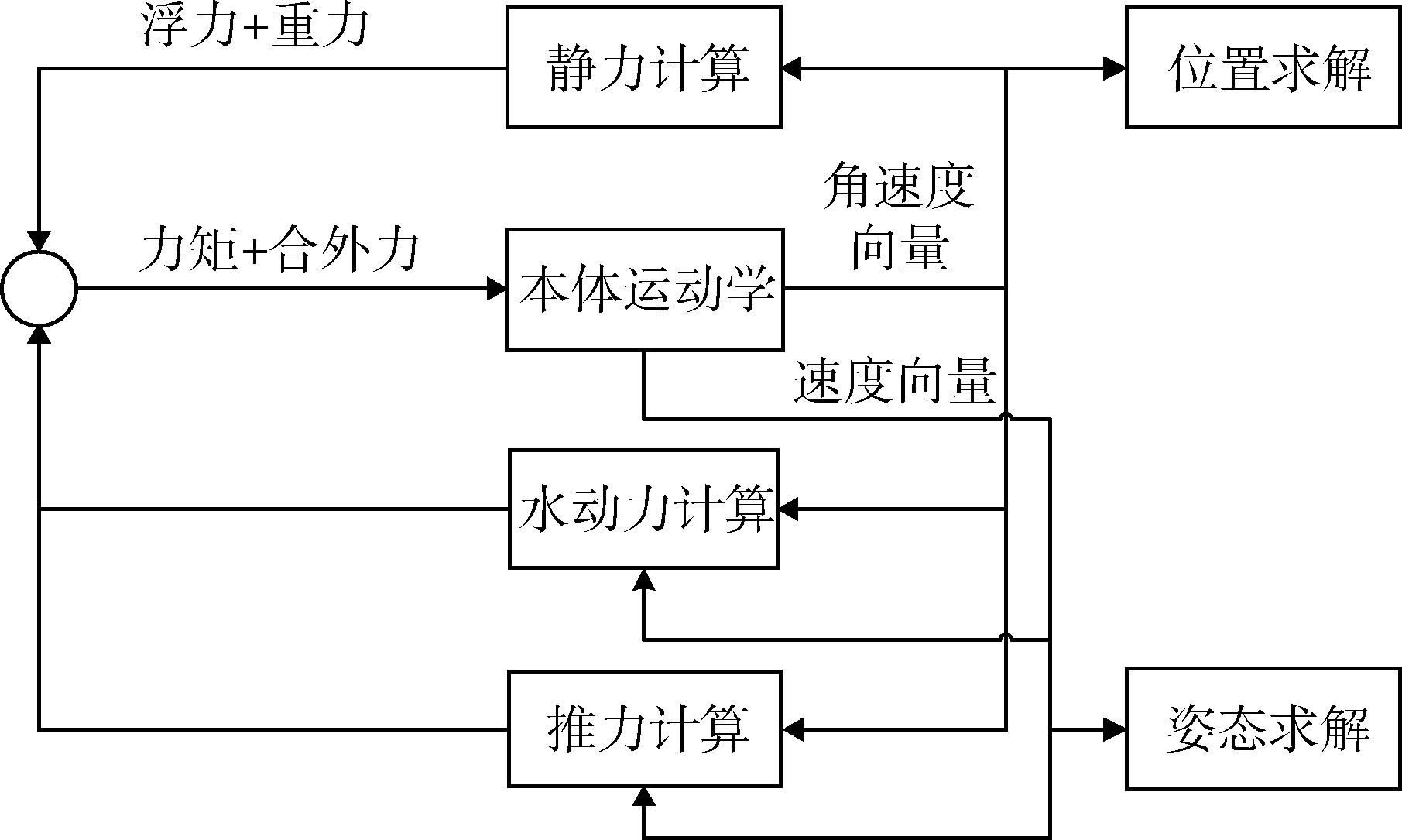
图2 动力学模型
Fig. 2 Dynamical model
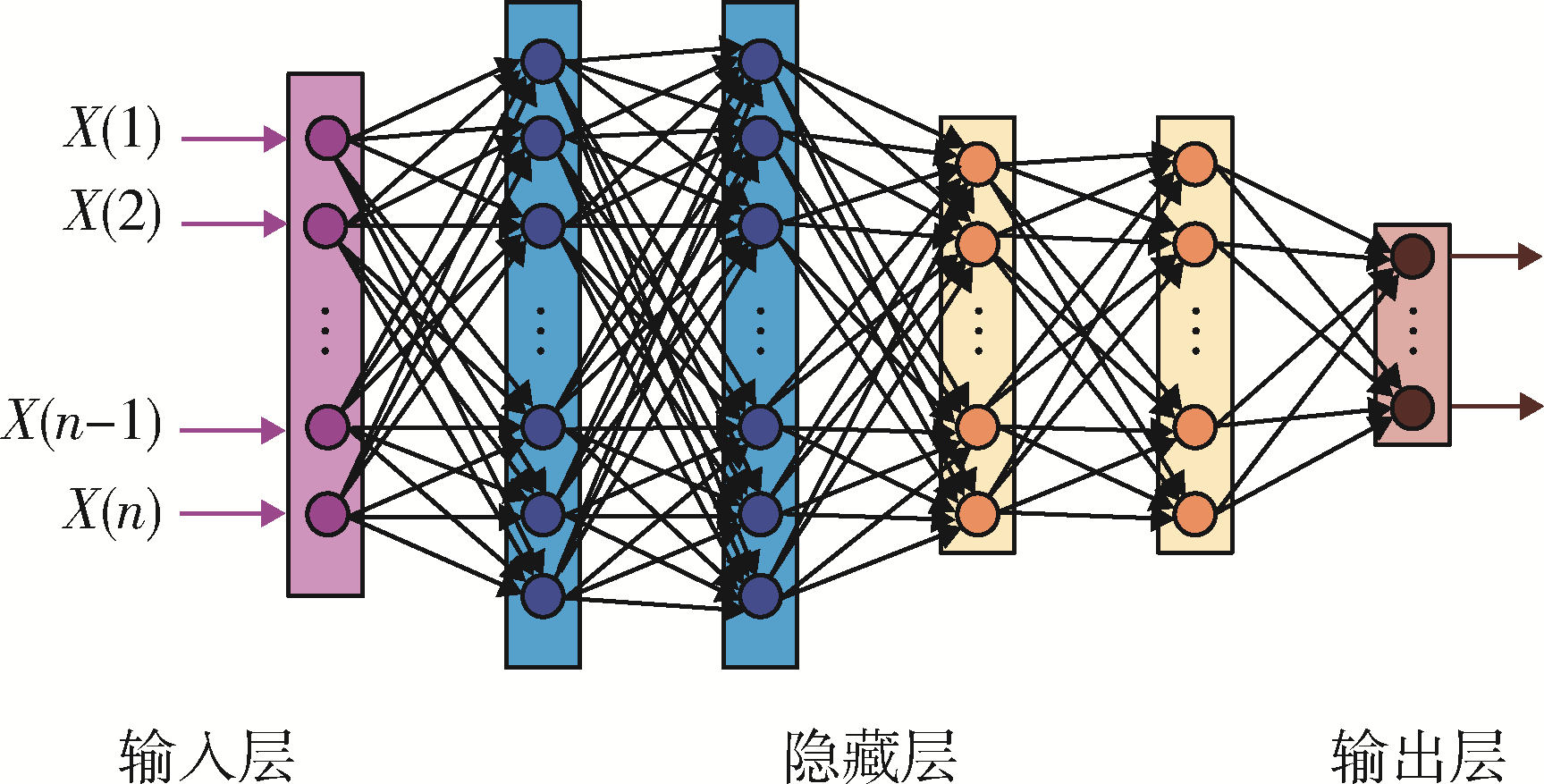
图3 神经网络结构图
Fig. 3 Neural network structure diagram
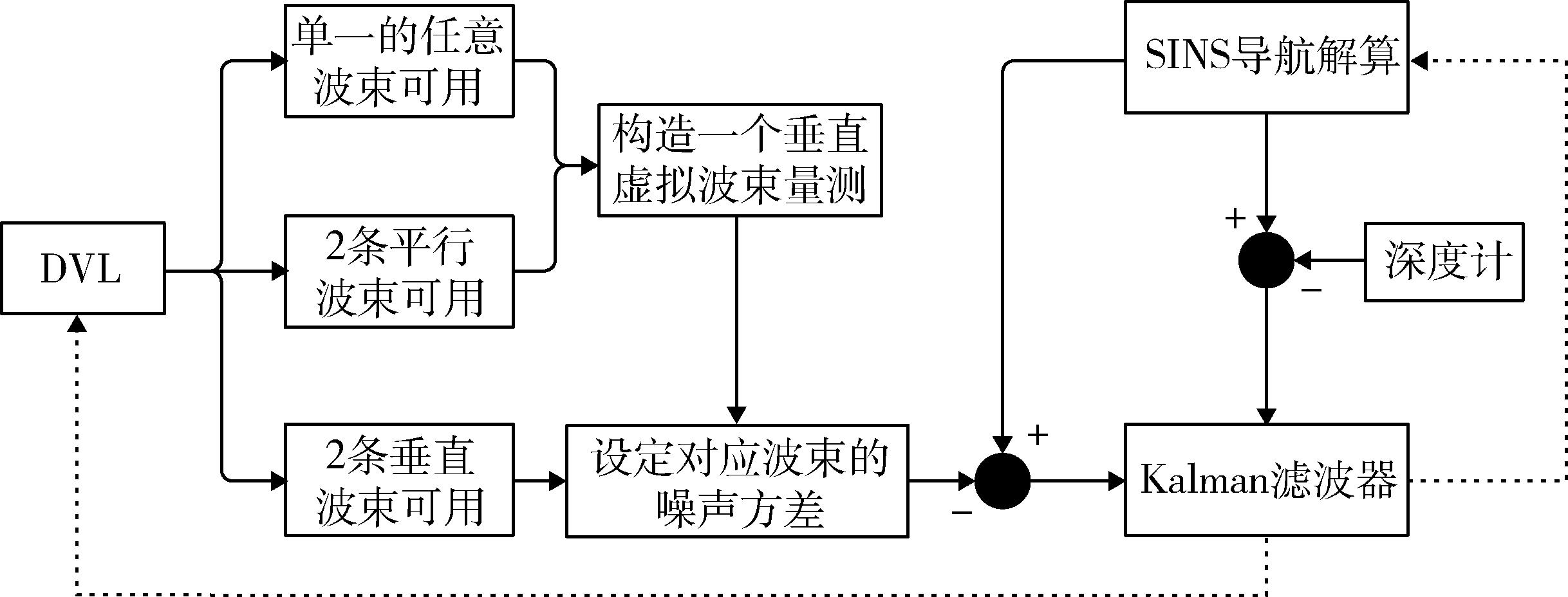
图4 “×”配置的DVL波束缺失的解决方案
Fig. 4 "×" configuration of the DVL beam missing solution
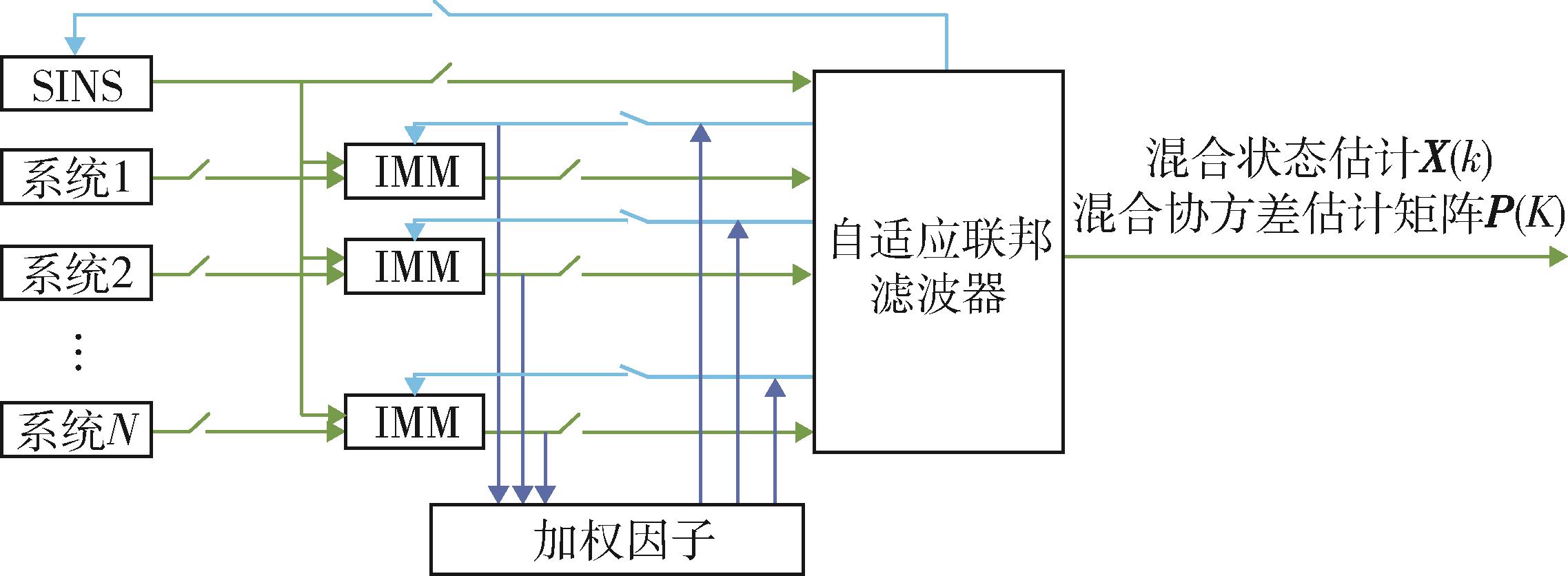
图5 自适应联邦IMM滤波器
Fig. 5 Schematic diagram of the adaptive federated IMM filter
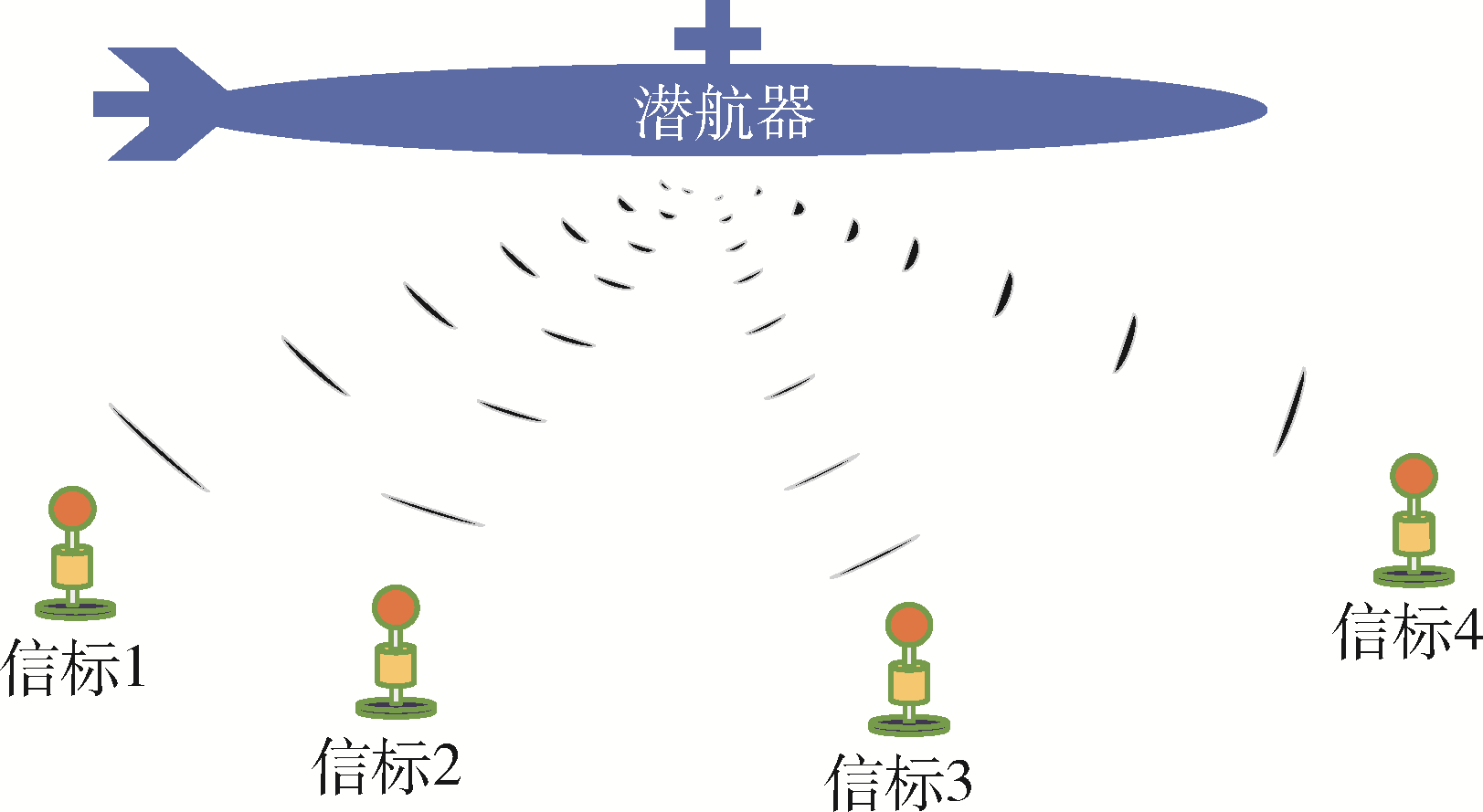
图6 长基线水声定位系统
Fig. 6 LBL underwater acoustic positioning system
| 1 | 刘沛佳. INS/DVL组合导航关键技术研究[D]. 北京:北京理工大学, 2018. |
| LIU Peijia. Research on Key Technologies of INS/DVL Integrated Navigation [D]. Beijing:Beijing Institute of Technology, 2018. | |
| 2 | 赵俊波,葛锡云,冯雪磊,等 .水下SINS/DVL组合导航技术综述[J]. 水下无人系统学报, 2018, 26(1): 2-9. |
| ZHAO Junbo, GE Xiyun, FENG Xuelei, et al. A Review of Underwater SINS/DVL Integrated Navigation Technology [J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 2-9. | |
| 3 | 严恭敏,翁浚. 捷联惯导算法与组合导航原理[M]. 西安:西北工业大学出版社, 2019. |
| YAN Gongmin, WENG Jun. Strapdown Inertial Navigation Algorithm and Integrated Navigation Principle [M]. Xi'an: Northwestern Polytechnical University Press, 2019. | |
| 4 | 刘射德,张涛,张佳宇,等. 基于多普勒频移的SINS/DVL紧组合导航方法研究[C]∥惯性技术发展动态发展方向研讨会论文集——前沿技术与惯性技术的融合与应用, 大连, 2021: 116-124. |
| LIU Shede, ZHANG tao, ZHANG Jiayu, et al. Study on SINS/DVL Tight Integrated Navigation Method Based on Doppler Frequency Shift [C]∥Proceedings of the Seminar on Dynamic Development Direction of Inertial Technology Development-Fusion and Application of Frontier Technology and Inertial Technology, Dalian, 2021: 116-124. | |
| 5 | 何波,吕鹏飞,郭佳,等. 基于动力学的速度模型辅助水下智能导航方法:中国,201910038062.4 [P]. 2019-1-16. |
| HE Bo, Pengfei LÜ, GUO Jia, et al. Dynamics-Based Velocity Model-Assisted Underwater Intelligent Navigation Method: China, 201910038062.4 [P]. 2019-1-16. | |
| 6 | 宋金雪. 模型辅助和流估计下的UUV自主导航定位方法研究[D]. 哈尔滨:哈尔滨工程大学, 2018. |
| SONG Jinxue. Model-Aided and Sea Current Estimation for UUV Autonomous Navigation Research [D]. Harbin: Harbin Engineering University, 2018. | |
| 7 | 邓力榕. 模型辅助导航下海流与UUV航速估计方法研究[D]. 哈尔滨:哈尔滨工程大学, 2014. |
| DENG Lirong. Research on SEA Current and UUV Velocity Estimation Methods Based on Model-Aided Navigation [D]. Harbin: Harbin Engineering University, 2014. | |
| 8 | 谢连妮. 基于水下航行器的SINS/DVL组合导航技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2014. |
| XIE Lianni. Research on Integrated Navigation Technology of SINS/DVL Based on Underwater Vehicles [D]. Harbin: Harbin Engineering University,2014. | |
| 9 | 张勋,边信黔,严浙平,等. 基于海流剖面的UUV辅助导航方法[J]. 仪器仪表学报, 2013, 34(6): 147-153. |
| ZHANG Xun, BIAN Xinqian, YAN Zheping, et al. Aided Navigation Method for UUV Based on Current Profile [J]. Chinese Journal of Scientific Instrument, 2013, 34(6): 147-153. | |
| 10 | 毛健,赵红东,姚婧婧. 人工神经网络的发展及应用[J]. 电子设计工程, 2011, 19(24): 62-65. |
| MAO Jian, ZHAO Hongdong, YAO Jingjing. Application and Prospect of Artificial Neural Network [J]. Electronic Design Engineering, 2011, 19(24): 62-65. | |
| 11 | LI Wanli, CHEN Mingjian, ZHANG Chao, et al. A Novel Neural Network-Based SINS/DVL Integrated Navigation Approach to Deal with DVL Malfunction for Underwater Vehicles [J]. Mathematical Problems in Engineering, 2020, 2020: 1-14. |
| 12 | 李万里,陈明剑,李军正,等. 一种捷联惯导/多普勒组合导航系统的导航方法:中国,202111123636.1[P]. 2021-12-28. |
| LI Wanli, CHEN Mingjian, LI Zhengjun, al et, A Navigation Method of SINS/DVL Integrated Navigation System : China, 202111123636.1 [P]. 2021-12-28. | |
| 13 | LI Ding, XU Jiangning, HE Hongyang, et al. An Underwater Integrated Navigation Algorithm to Deal with DVL Malfunctions Based on Deep Learning [J]. IEEE Access,2021, 9(1): 82010-82020. |
| 14 | EDOARDO T, ALBERTO T, MATTEO F, et al. LSTM-Based Dead Reckoning Navigation for Autonomous Underwater Vehicles [C]∥Global Oceans 2020 Singapore-U.S. CoastGulf, Biloxi, MS, USA, October 05-30, 2020: 0197-7385. |
| 15 | WANG Bo, HUANG Liu, LIU Jingyang, et al. A Support Vector Regression-Based Integrated Navigation Method for Underwater Vehicles [J]. IEEE Sensors Journal, 2020, 20(15): 8875-8883. |
| 16 | SUN Jin, WANG Fu. An Effective LS-SVM/AKF Aided SINS/DVL Integrated Navigation System for Underwater Vehicles [J]. Peer-to-Peer Networking and Applications, 2022, 15(3): 1437-1451. |
| 17 | WANG Di, XU Xiaosu, YAO Yiqing, et al. Virtual DVL Reconstruction Method for an Integrated Navigation System Based on DS-LSSVM Algorithm [J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-13. |
| 18 | ZHU Yixian, CHENG Xianghong, HU Jie, et al. A Novel Hybrid Approach to Deal with DVL Malfunctions for Underwater Integrated Navigation Systems [J]. Applied Sciences, 2017, 7(8): 759. |
| 19 | LIU Shede, ZHANG Tao, ZHANG Jiayu, et al. A New Coupled Method of SINS/DVL Integrated Navigation Based on Improved Dual Adaptive Factors [J]. IEEE Transactions on Instrumentation and Measurement, 2021,70: 1-11. |
| 20 | SAEED A R, MOJTABA H, HASSAN S. Pseudo DVL Reconstruction by an Evolutionary TS-Fuzzy Algorithm for Ocean Vehicles [J]. Measurement, 2019, 147: 106831. |
| 21 | 彭旭东. 基于M估计的SINS/DVL组合导航系统研究[D]. 哈尔滨: 哈尔滨工程大学, 2017. |
| PENG Xudong. Research on SINS/DVL Integrated Navigation System Based on M Estimation [D]. Harbin: Harbin Engineering University, 2017. | |
| 22 | 王宏健,李村,么洪飞,等. 基于高斯混合容积卡尔曼滤波的UUV自主导航定位算法[J]. 仪器仪表学报, 2015, 36(2): 254-261. |
| WANG Hongjian, LI Cun, YAO Hongfei, et al, Gaussian Mixture Cubature Kalman Filter Based Autonomous Navigation and Localization Algorithm for UUV [J]. Chinese Journal of Scientific Instrument, 2015, 36(2): 254-261. | |
| 23 | ZHAO Liye, LIU Xianjun, WANG Lei, et al. A Pretreatment Method for the Velocity of DVL Based on the Motion Constraint for the Integrated SINS/DVL [J]. Applied Sciences, 2016, 6(3): 79. |
| 24 | HOU Lanhua, XU Xiaosu, YAO Yiqing, et al. Improved Exponential Weighted Moving Average Based Measurement Noise Estimation for Strapdown Inertial Navigation System/Doppler Velocity Log Integrated System [J]. Journal of Navigation, 2021, 74(2): 467-487. |
| 25 | 黄莺. 基于CKF的SINS/DVL组合导航系统设计与仿真[D]. 哈尔滨: 哈尔滨工程大学, 2013. |
| HUANG Ying. Design and Simulation of SINS/DVL Integrated Navigation System Based on CKF [D]. Harbin: Harbin Engineering University, 2013. | |
| 26 | 王君婷. 水下AUV导航的非线性滤波算法研究[D]. 北京:中国石油大学, 2018. |
| WANG Junting. Research on Nonlinear Filtering Algorithm for Underwater AUV Navigation [D]. Beijing: China University of Petroleum, 2018. | |
| 27 | 徐晓苏,董亚,童金武,等. 基于5阶球面最简相径的改进型容积卡尔曼滤波在SINS/DVL组合导航中的应用[J]. 中国惯性技术学报, 2017, 25(3): 343-348. |
| XU Xiaosu, DONG Ya, TONG Jinwu, et al. Improved Fifth-Degree Spherical Simplex Sadial Cubature Kalman Filter in SINS/DVL Integrated Navigation [J]. Journal of Chinese Inertial Technology, 2017, 25(3): 343-348. | |
| 28 | 唐康华,江明明,翁炬. 基于自适应滤波的水下SINS/相控阵DVL组合导航算法设计[J]. 中国惯性技术学报, 2013, 21(1): 65-70. |
| TANG Kanghua, JIANG Mingming, WENG Ju. Design of SINS/ Phased Array DVL Integrated Navigation System for Underwater Vehicle Based on Adaptive Filtering [J]. Journal of Chinese Inertial Technology, 2013, 21(1): 65-70. | |
| 29 | YAN Xiaozhen, YANG Yipeng, LUO Qinghua, et al. A SINS/DVL Integrated Positioning System Through Filtering Gain Compensation Adaptive Filtering [J]. Sensors, 2019, 19(20): 4576. |
| 30 | LIU Ruixin, LIU Fucheng, LIU Chunning, et al. Modified Sage-Husa Adaptive Kalman Filter-Based SINS/DVL Integrated Navigation System for AUV[J]. Journal of Sensors,2021(3): 1-28. |
| 31 | SHI Wence, XU Jiangning, LI Ding, et al. Attitude Estimation of SINS on Underwater Dynamic Base with Variational Bayesian Robust Adaptive Kalman Filter [J]. IEEE Sensors Journal, 2022, 22(11): 10954-10964. |
| 32 | Weiwei LYU, CHENG Xianghong, WANG Jinling. Adaptive Federated IMM Filter for AUV Integrated Navigation Systems [J]. Sensors, 2020, 20(23): 6806. |
| 33 | 臧新乐. 捷联惯性导航系统误差阻尼技术[D]. 哈尔滨:哈尔滨工程大学, 2017. |
| ZANG Xinle. Error Damping Technique of Strapdown Inertial Navigation System [D]. Harbin: Harbin Engineering University, 2017. | |
| 34 | 李倩. 横坐标系捷联惯导系统极区导航及其误差抑制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2014. |
| LI Qian. Research on Transversal Strapdown INS and Error Depression Technology in Polar Region [D]. Harbin: Harbin Engineering University, 2014. | |
| 35 | 杨晓龙. 捷联惯性导航系统阻尼和重力辅助技术研究[D]. 哈尔滨:哈尔滨工程大学, 2015. |
| YANG Xiaolong. The Research of SINS Damping and Gravity Aid Technology [D]. Harbin: Harbin Engineering University, 2015. | |
| 36 | 刘潺,吴文启,冯国虎,等.基于虚拟圆球法向量的极区惯性导航算法[J].中国惯性技术学报, 2020, 28(4): 421-428. |
| LIU Chan, WU Wenqi, FENG Guohu, et al. Polar Navigation Algorithm for INS Based on Virtual Sphere N-Vector [J]. Journal of Chinese Inertial Technology, 2020, 28(4): 421-428. | |
| 37 | 刘潺,吴文启,冯国虎,等.法向量位置模型下的水下长航时惯性导航阻尼算法[J].中国惯性技术学报, 2021, 29(6): 709-716. |
| LIU Chan, WU Wenqi, FENG Guohu, et al. Damping Algorithm for Long-Endurance Underwater INS Based on N-Vector Model [J]. Journal of Chinese Inertial Technology, 2021, 29(6): 709-716 | |
| 38 | 张静远,谌剑,李恒,等. 水下地形辅助导航技术的研究与应用进展[J]. 国防科技大学学报, 2015, 37(3): 128-135. |
| ZHANG Jingyuan, SHEN Jian, LI Heng, et al. Research and Application Progress on Underwater Terrain-Aided Navigation Technology[J]. Journal of National University of Defense Technology, 2015, 37(3): 128-135. | |
| 39 | LI Peijuan, SHENG Guoliang, ZHANG Xiaofei, et al. Underwater Terrain-Aided Navigation System Based on Combination Matching Algorithm [J]. ISA Transactions, 2018, 78: 80-87. |
| 40 | 张立华,刘现鹏,贾帅东,等. 一种线面组合的水下地形匹配算法[J]. 测绘学报, 2018, 47(10): 1406-1414. |
| ZHANG Lihua, LIU Xianpeng, JIA Shuaidong, et al. A Line-Surface Integrated Algorithm for Underwater Terrain Matching [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(10): 1406-1414. | |
| 41 | XIONG Lu, SHEN Jian, BI Xiaowen. A New Method of Terrain Self-Adaptive Matching Algorithm for Autonomous Underwater Vehicle [J]. Journal of Physics: Conference Series, 2019, 1237(2): 022014. |
| 42 | 于力. 水下运载体重力匹配算法研究[D]. 北京:北京理工大学, 2016. |
| YU Li. Research of Underwater Vehicle Gravity Matching Algorithm[D]. Beijing: Beijing Institute of Technology, 2016. | |
| 43 | 付梦印,刘飞,袁书明,等. 水下惯性/重力匹配自主导航综述[J]. 水下无人系统学报, 2017, 25(2): 31-43. |
| FU Mengyin, LIU Fei, YUAN Shuming, et al. Review of Undersea Autonomous Inertial-Gravity Matching Navigation [J]. Journal of Unmanned Undersea Systems, 2017, 25(2): 31-43. | |
| 44 | 张同伟,秦升杰,唐嘉陵,等. 深海长基线定位系统现状及展望[J]. 测绘通报, 2018(10): 75-78. |
| ZHANG Tongwei, QIN Shengjie, TANG Jialing, et al. Technical Status and Development Trend of Deep Sea LBL [J]. Bulletin of Surveying and Mapping, 2018(10): 75-78. | |
| 45 | 陈立平. 基于SINS/LBL交互辅助定位的AUV导航技术研究[D]. 南京:东南大学, 2016. |
| CHEN Liping. Research on Navigation Technology Based on SINS/LBL Interaction Assisted Positioning for AVU [D]. Nanjing: Southeast University, 2016. | |
| 46 | 王皓. 高精度长航时惯导系统重力扰动补偿方法研究[D]. 北京:北京理工大学, 2015. |
| WANG Hao, The Study of Gravity Disturbance Compensation Method of High-Accuracy Long-Time INS[D]. Beijing:Beijing Institute of Technology,2015. | |
| 47 | WU Ruonan, WU Qiuping, HAN Fengtian, et al. Gravity Compensation Using EGM2008 for High-Precision Long-Term Inertial Navigation Systems [J]. Sensors (Basel, Switzerland), 2016, 16(12): 2177. |
| 48 | 翁海娜,李鹏飞,高峰,等. 高精度惯导系统重力扰动的阻尼抑制方法[J]. 中国惯性技术学报, 2017, 25(2): 141-145. |
| WENG Haina, LI Pengfei, GAO Feng, et al. Damping Suppression Method for Gravity Disturbance of High-Precision Inertial Navigation System [J]. Journal of Chinese Inertial Technology, 2017, 25(2): 141-145. |
| [1] | 周春明, 甘祖旺, 何云昆, 赵敏. 基于作战使用样式的实航工作可靠度评估方法[J]. 现代防御技术, 2020, 48(6): 103-107. |
| [2] | 刘标, 许腾, 李光. D-S证据理论改进算法提高水下目标识别准确性[J]. 现代防御技术, 2018, 46(1): 120-124. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
