

现代防御技术 ›› 2023, Vol. 51 ›› Issue (5): 67-76.DOI: 10.3969/j.issn.1009-086x.2023.05.009
敦晓彪1, 张新博1, 尹童1, 蔡婧竹2, 李宏宇1, 于成龙1, 宿敬亚1
收稿日期:2022-09-22
修回日期:2022-12-03
出版日期:2023-10-28
发布日期:2023-11-02
作者简介:敦晓彪(1989-),男,河北石家庄人。工程师,博士,主要研究方向为飞行器总体设计及制导控制。
Xiaobiao DUN1, Xinbo ZHANG1, Tong YIN1, Jingzhu CAI2, Hongyu LI1, Chenglong YU1, Jingya XIU1
Received:2022-09-22
Revised:2022-12-03
Online:2023-10-28
Published:2023-11-02
摘要:
针对有末端视线角约束下拦截高速机动目标的场景,设计了一种模糊变系数变结构制导律。提出了一种自适应变结构制导律,制导律可以根据弹目距离自适应调整趋近滑模面的速度;用饱和函数代替制导律中的开关项,有效消除了系统抖振。仿真表明,拦截高速非机动和高速机动目标,提出的变结构制导律均可以满足视线角约束和脱靶量要求,但需用过载较大。为解决需用过载较大的问题,引入模糊控制方法,设计模糊控制器对变结构制导律中的导引系数进行优化,得到了一种模糊变系数变结构制导律,可以满足视线角约束且有效抑制了系统的需用过载。
中图分类号:
敦晓彪, 张新博, 尹童, 蔡婧竹, 李宏宇, 于成龙, 宿敬亚. 一种有视线角约束的模糊变系数变结构制导律[J]. 现代防御技术, 2023, 51(5): 67-76.
Xiaobiao DUN, Xinbo ZHANG, Tong YIN, Jingzhu CAI, Hongyu LI, Chenglong YU, Jingya XIU. A Fuzzy Variable Coefficient Variable Structure Guidance Law with Terminal Line-of-Sight Angle Constraint[J]. Modern Defense Technology, 2023, 51(5): 67-76.
图1 平面内交会几何
Fig. 1 Planar engagement geometry
图2 视线角约束不同的弹道
Fig. 2 Trajectories with different LOS angle constraint
| 序号 | 视线角约束/(°) | 脱靶量/m |
|---|---|---|
| 1 | 5 | 1.885 8 |
| 2 | 10 | 1.420 1 |
| 3 | 15 | 0.577 7 |
表1 视线角约束不同的脱靶量对比
Table 1 Comparison of miss distance with different LOS angle constraints
| 序号 | 视线角约束/(°) | 脱靶量/m |
|---|---|---|
| 1 | 5 | 1.885 8 |
| 2 | 10 | 1.420 1 |
| 3 | 15 | 0.577 7 |
图3 目标加速度
Fig. 3 Target acceleration
图4 视线角约束不同时的弹道
Fig. 4 Trajectories of different LOS angle constraints
| 序号 | 视线角约束/(°) | 脱靶量/m |
|---|---|---|
| 1 | 5 | 2.917 5 |
| 2 | 10 | 0.192 9 |
| 3 | 15 | 2.758 9 |
表2 视线角约束不同时的脱靶量对比
Table 2 Comparison of miss distance with different LOS angle constrains
| 序号 | 视线角约束/(°) | 脱靶量/m |
|---|---|---|
| 1 | 5 | 2.917 5 |
| 2 | 10 | 0.192 9 |
| 3 | 15 | 2.758 9 |
图5 视线角变化曲线
Fig. 5 Variation of LOS angle with different LOS angle constraints
图6 视线角速率变化曲线
Fig. 6 Variation of LOS angle rate with different LOS angle constraints
| 视线角约束 | 视线角 | 视线角误差 |
|---|---|---|
| 5 | 4.77 | 0.23 |
| 10 | 9.77 | 0.23 |
| 15 | 14.77 | 0.23 |
表3 视线角约束不同时视线角误差对比 (°)
Table 3 Comparison of LOS angle errors with different LOS angle constraints
| 视线角约束 | 视线角 | 视线角误差 |
|---|---|---|
| 5 | 4.77 | 0.23 |
| 10 | 9.77 | 0.23 |
| 15 | 14.77 | 0.23 |
图7 视线角权系数不同时的弹道
Fig. 7 Trajectories with different LOS angle weight coefficients
| 序号 | 视线角权系数 | 脱靶量/m |
|---|---|---|
| 1 | 0.5 | 0.702 0 |
| 2 | 1 | 1.716 4 |
| 3 | 2 | 2.279 0 |
表4 视线角权系数不同的脱靶量对比
Table 4 Comparison of miss distance with LOS angle weight coefficients
| 序号 | 视线角权系数 | 脱靶量/m |
|---|---|---|
| 1 | 0.5 | 0.702 0 |
| 2 | 1 | 1.716 4 |
| 3 | 2 | 2.279 0 |
| 视线角权系数 | 视线角/(°) | 视线角误差/(°) |
|---|---|---|
| 0.5 | 9.635 | 0.365 |
| 1 | 9.816 | 0.184 |
| 2 | 9.908 | 0.092 |
表5 视线角权系数不同时的视线角误差对比
Table 5 Comparison of LOS angle errors with different LOS angle weight coefficients
| 视线角权系数 | 视线角/(°) | 视线角误差/(°) |
|---|---|---|
| 0.5 | 9.635 | 0.365 |
| 1 | 9.816 | 0.184 |
| 2 | 9.908 | 0.092 |
图8 导引系数不同时的弹道
Fig. 8 Trajectories with different guidance coefficients
| 序号 | 导引系数 | 脱靶量/m |
|---|---|---|
| 1 | 2 | 0.160 7 |
| 2 | 4 | 1.805 2 |
| 3 | 6 | 1.704 5 |
表6 导引系数不同的脱靶量对比
Table 6 Comparison of miss distance with different guidance coefficients
| 序号 | 导引系数 | 脱靶量/m |
|---|---|---|
| 1 | 2 | 0.160 7 |
| 2 | 4 | 1.805 2 |
| 3 | 6 | 1.704 5 |
图9 导引系数不同视线角变化曲线
Fig. 9 Variation of LOS angle with different guidance coefficients
图10 导引系数不同视线角速率变化曲线
Fig. 10 Variation of LOS angle rate with different guidance coefficients
| 导引系数 | 视线角 | 视线角误差 |
|---|---|---|
| 2 | 9.848 | 0.152 |
| 4 | 9.901 | 0.099 |
| 6 | 9.924 | 0.076 |
表7 导引系数不同时视线角误差对比 (°)
Table 7 Comparison of LOS angle errors with different guidance coefficients
| 导引系数 | 视线角 | 视线角误差 |
|---|---|---|
| 2 | 9.848 | 0.152 |
| 4 | 9.901 | 0.099 |
| 6 | 9.924 | 0.076 |
图11 控制指令变化曲线
Fig. 11 Variation of control command
图12 切换函数变化曲线
Fig. 12 Variation of switching function
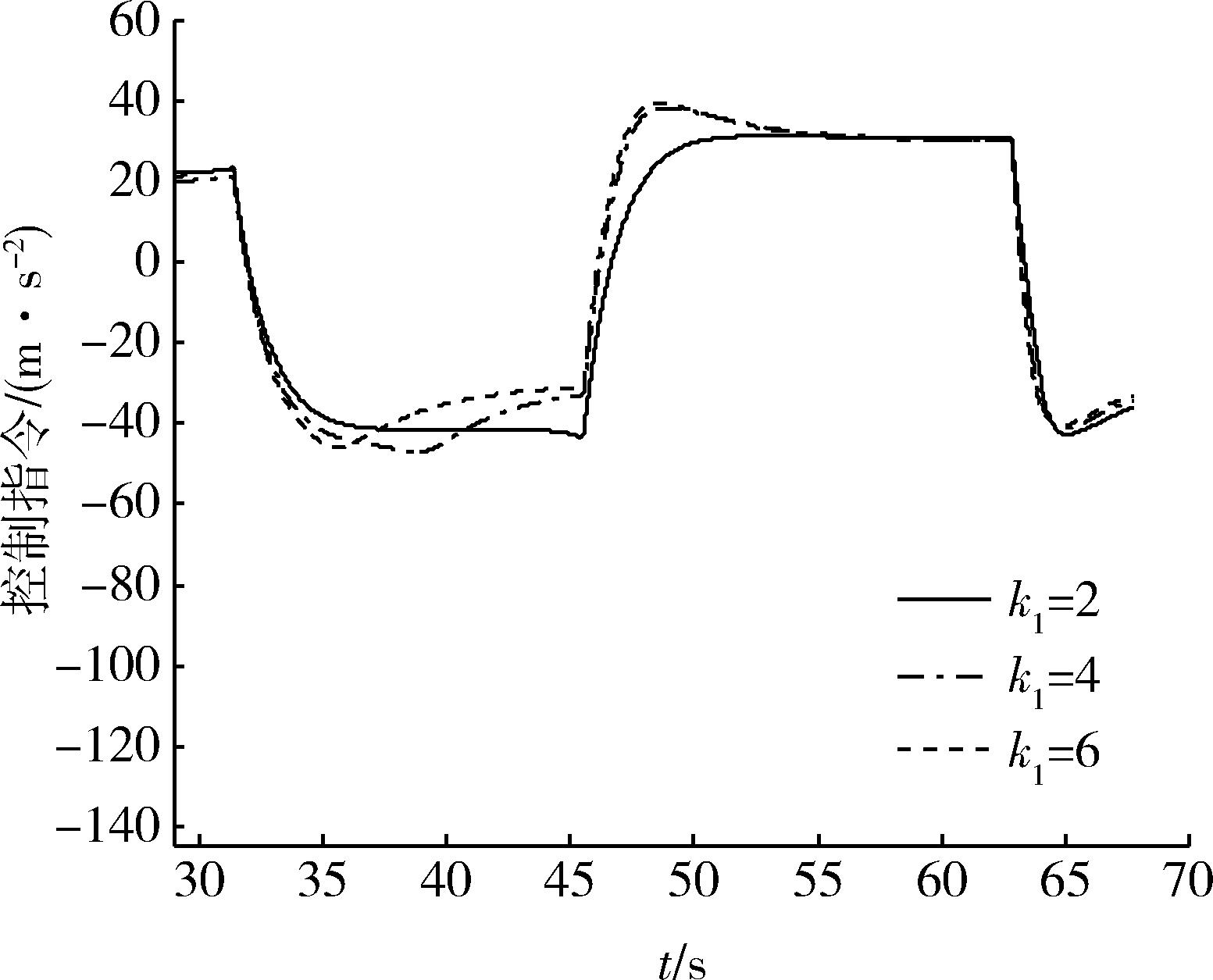
图13 控制指令变化曲线
Fig. 13 Variation of control command
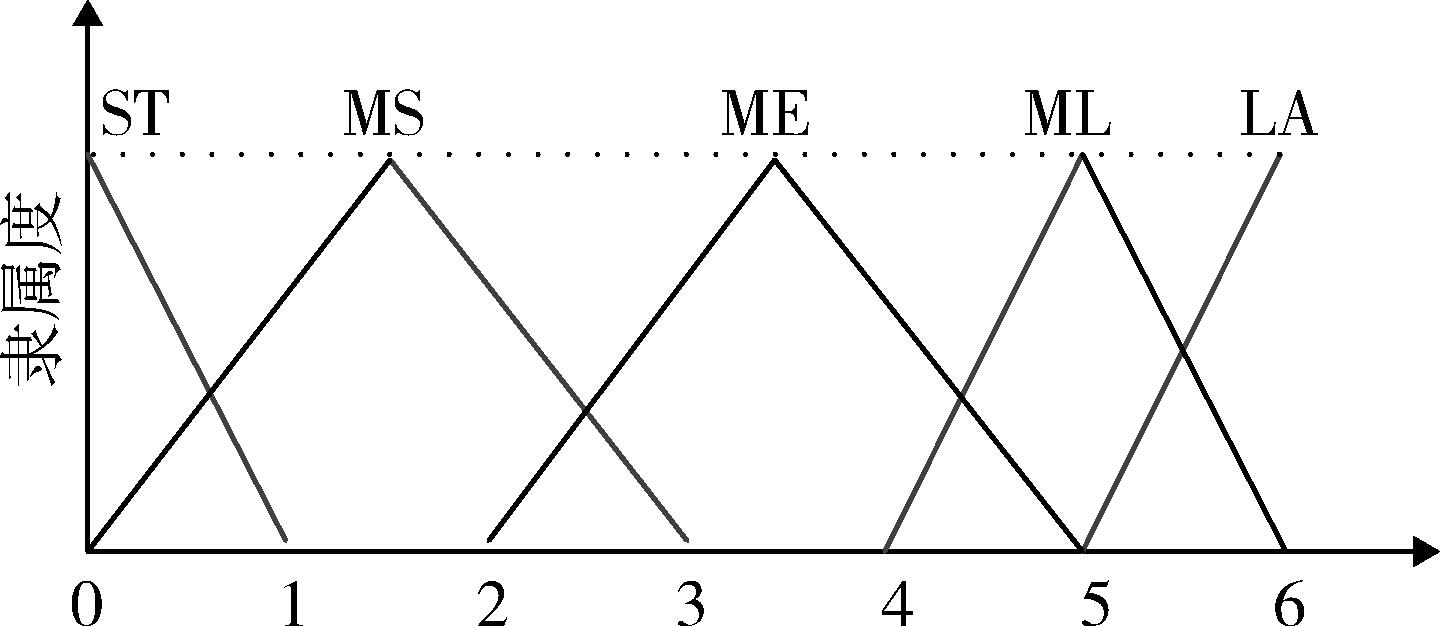
图14 输入变量隶属度函数
Fig. 14 Membership functions describing for input
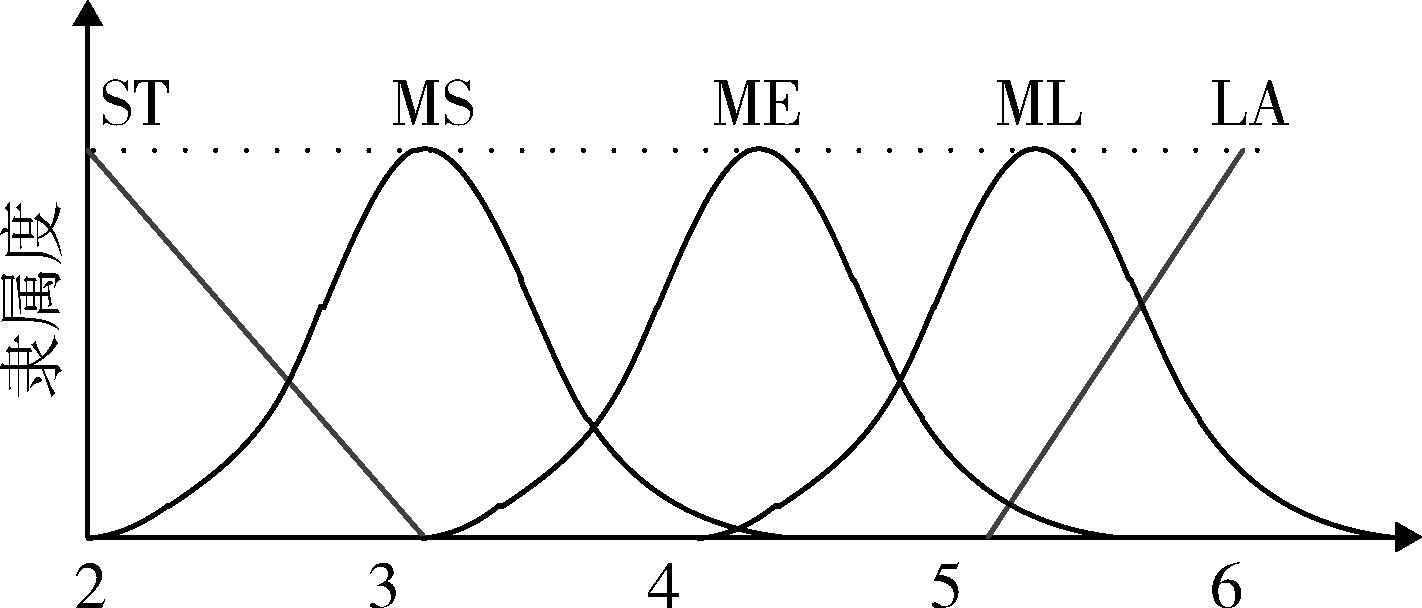
图15 输出隶属度函数
Fig. 15 Membership functions describing for output
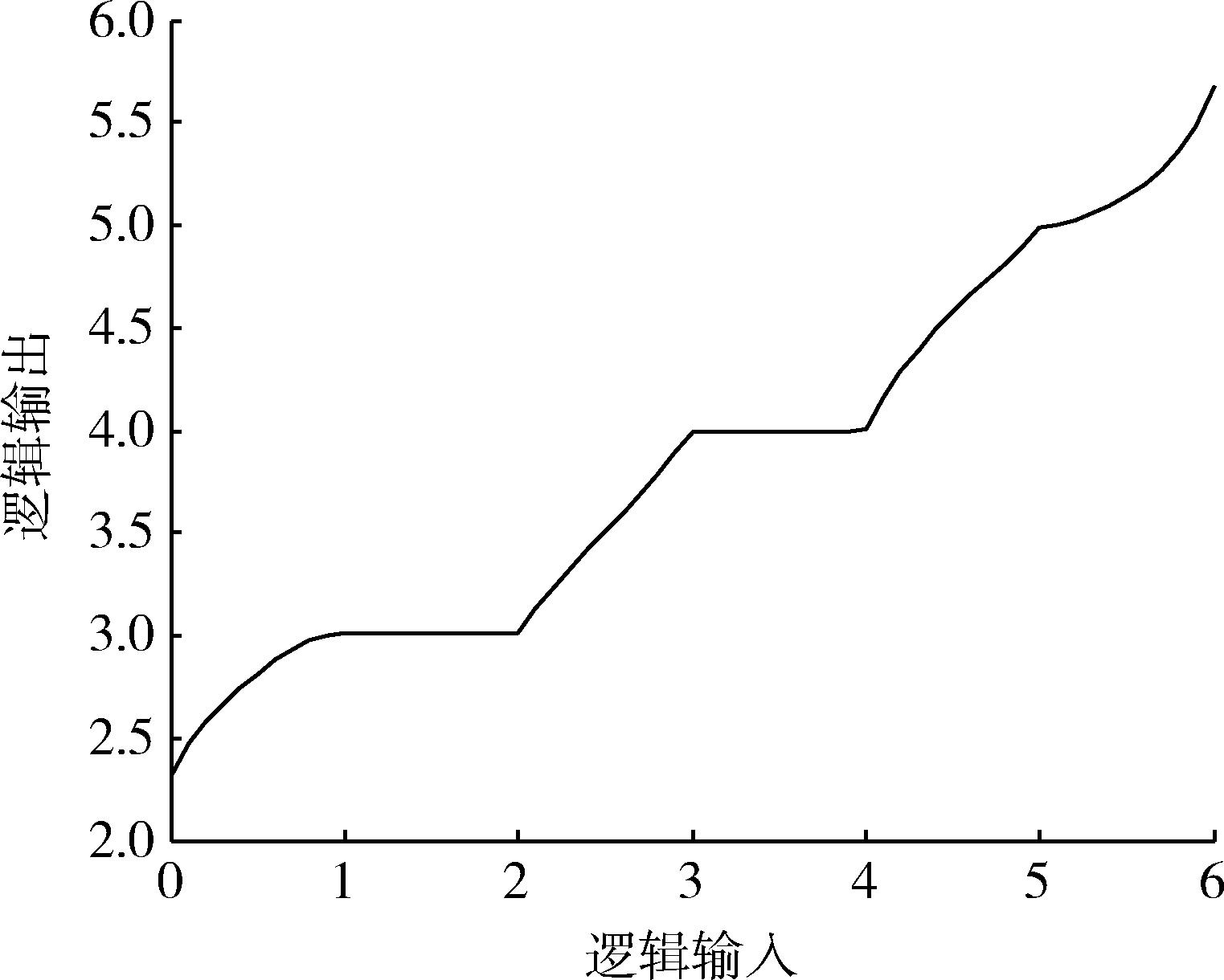
图16 模糊关系
Fig. 16 Fuzzy relationship
图17 拦截弹道对比
Fig. 17 Comparison of intercept trajectories
| 参数 | 变结构制导律 | 模糊变结构制导律 |
|---|---|---|
| 脱靶量/m | 0.973 1 | 0.138 3 |
| 视线角/(°) | 9.881 | 9.868 |
| 视线角误差/(°) | 0.119 | 0.132 |
表8 视线角误差对比
Table 8 Comparison of LOS angle errors
| 参数 | 变结构制导律 | 模糊变结构制导律 |
|---|---|---|
| 脱靶量/m | 0.973 1 | 0.138 3 |
| 视线角/(°) | 9.881 | 9.868 |
| 视线角误差/(°) | 0.119 | 0.132 |
图18 视线角变化对比
Fig. 18 Comparison of LOS angle
图19 视线角速率变化对比
Fig. 19 Comparison of LOS angle rate
图20 控制指令变化曲线
Fig. 20 Variation of control command
| 1 | 祝月, 徐俊艳, 王晓东, 等. 大交会角约束下非线性系统三维能量最优制导律[J]. 现代防御技术, 2022, 50(3): 47-54. |
| ZHU Yue, XU Junyan, WANG Xiaodong, et al. Three-Dimensional Optimal Guidance Law for Non-Linear Systems with Large Constrained Impact Angles[J]. Modern Defence Technology, 2022, 50(3): 47-54. | |
| 2 | 李贵栋, 陆海英, 李志维, 等. 一种改进的带角度约束最优制导律[J]. 现代防御技术, 2022, 50(5): 52-58. |
| LI Guidong, LU Haiying, LI Zhiwei, et al. An Improved Optimal Guidance Law with Angle Constraint[J]. Modern Defence Technology, 2022, 50(5): 52-58. | |
| 3 | 李博. 模糊自适应滑模制导律研究[D]. 哈尔滨: 哈尔滨工业大学, 2007. |
| LI Bo. The Study of Fuzzy Adaptive Sliding-Mode Guidance Law[D]. Harbin: Harbin Institute of Technology, 2007. | |
| 4 | CREASER P A, STACEY B A, WHITE B A. Evolutionary Generation of Fuzzy Guidance Laws[C]∥UKACC International Conference on Control '98 (Conf. Publ. No. 455. Piscataway, NJ, USA: IEEE, 1998: 883-888. |
| 5 | 黄景帅, 张洪波, 汤国建, 等. 拦截大气层内机动目标的自适应积分滑模制导律[J]. 宇航学报, 2019, 40(1): 51-60. |
| HUANG Jingshuai, ZHANG Hongbo, TANG Guojian, et al. Adaptive Integral Sliding-Mode Guidance Law for Intercepting Endo-Atmospheric Maneuvering Targets[J]. Journal of Astronautics, 2019, 40(1): 51-60. | |
| 6 | 杨峰, 周德云, 张堃, 等. 具有终端约束的制导炸弹模糊变结构制导律设计[J]. 指挥控制与仿真, 2013, 35(1): 131-134. |
| YANG Feng, ZHOU Deyun, ZHANG Kun, et al. Design of Fuzzy Variable Structure Guidance Law with Terminal Constraint for Guided Bomb[J]. Command Control & Simulation, 2013, 35(1): 131-134. | |
| 7 | 刘永善, 刘藻珍, 李兰忖. 攻击机动目标的被动寻的模糊变结构制导律研究[J]. 系统工程与电子技术, 2007, 29(2): 254-258. |
| LIU Yongshan, LIU Zaozhen, LI Lancun. Research on Fuzzy Variable Structure Guidance Law for Passive Homing Missiles Against Maneuvering Targets[J]. Systems Engineering and Electronics, 2007, 29(2): 254-258. | |
| 8 | 李兰忖, 刘永善. 模糊自适应滑模变结构制导律研究[J]. 弹箭与制导学报, 2005, 25(4): 481-483, 491. |
| LI Lancun, LIU Yongshan. Study on Fuzzy Adaptive Sliding-Mode Variable Structure Guidance Law[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2005, 25(4): 481-483, 491. | |
| 9 | 杨益兴. 自适应模糊滑模变结构制导律研究[J]. 舰船科学技术, 2015, 37(3): 122-125. |
| YANG Yixing. Study of Fuzzy Adaptive Sliding-Mode Control Guidance Law[J]. Ship Science and Technology, 2015, 37(3): 122-125. | |
| 10 | 顾文锦, 张汝川, 赵红超. 基于自适应模糊神经网络逼近的滑模制导算法研究[C]∥第27届中国控制会议论文集. 北京: 北京航空航天大学出版社, 2008: 1808-1812. |
| GU Wenjin, ZHANG Ruchuan, ZHAO Hongchao. On Sliding Mode Guidance Algorithm for Based on Adaptive Fuzzy-Neural Network Approximation[C]∥The 27th Chinese Control Conference. Beijing: Beihang University Press, 2008: 1808-1812. | |
| 11 | 郑守军, 姜长生. 空空导弹三维自适应模糊滑模制导律设计[J]. 电光与控制, 2008, 15(1): 12-16. |
| ZHENG Shoujun, JIANG Changsheng. Design of a 3-D Adaptive Fuzzy Sliding Mode Guidance Law for Air to Air Missiles[J]. Electronics Optics & Control, 2008, 15(1): 12-16. | |
| 12 | 李士勇, 袁丽英. 拦截机动目标的自适应模糊末制导律设计[J]. 电机与控制学报, 2009, 13(2): 312-316. |
| LI Shiyong, YUAN Liying. Adaptive Fuzzy Guidance Law for Maneuvering Targets[J]. Electric Machines and Control, 2009, 13(2): 312-316. | |
| 13 | 张旭, 雷虎民, 李炯, 等. 变论域模糊自适应滑模有限时间收敛制导律[J]. 国防科技大学学报, 2015, 37(2): 149-155. |
| ZHANG Xu, LEI Humin, LI Jiong, et al. Variable Universe Fuzzy Adaptive Sliding Mode Guidance Law with Finite Time Convergence[J]. Journal of National University of Defense Technology, 2015, 37(2): 149-155. | |
| 14 | 李红霞. 拦截大机动目标的模糊导引律研究[D]. 沈阳: 东北大学, 2013. |
| LI Hongxia. Research on Fuzzy Guidance Law for Intercepting Maneuvering Targets[D]. Shenyang: Northeastern University, 2013. | |
| 15 | Xiaobiao DUN, CAI Jingzhu, LI Hongyu, et al. A Fuzzy Variable Coefficient Variable Structure Guidance Law with Terminal Line-of-Sight Angle Constraint[C]∥Proceedings of 2021 International Conference on Autonomous Unmanned Systems (ICAUS 2021). Singapore: Springer Singapore, 2022: 207-216. |
| [1] | 李贵栋, 陆海英, 李志维, 韦世顺, 张欧. 一种改进的带角度约束最优制导律[J]. 现代防御技术, 2022, 50(5): 52-58. |
| [2] | 吴刚, 张科. 拦截大机动目标的有限时间收敛制导律[J]. 现代防御技术, 2022, 50(5): 43-51. |
| [3] | 焦思洋, 潘涛, 孔哲, 刘宝宁. 基于滑模变结构的高速动能弹制导控制算法[J]. 现代防御技术, 2022, 50(2): 53-60. |
| [4] | 刘开封, 孟海东, 王长江, 李军营, 陈颖. 滑翔飞行器反逆轨拦截突防制导律研究[J]. 现代防御技术, 2018, 46(5): 39-45. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
