现代防御技术 ›› 2025, Vol. 53 ›› Issue (5): 161-168.DOI: 10.3969/j.issn.1009-086x.2025.05.017
• 目标特性与探测跟踪技术 • 上一篇
袁赛博1, 赵毅1,2, 刘丹1,2, 陈成增1,3, 李传铭1,2
Saibo YUAN1, Yi ZHAO1,2, Dan LIU1,2, Chengzeng CHEN1,3, Chuanming LI1,2
摘要:
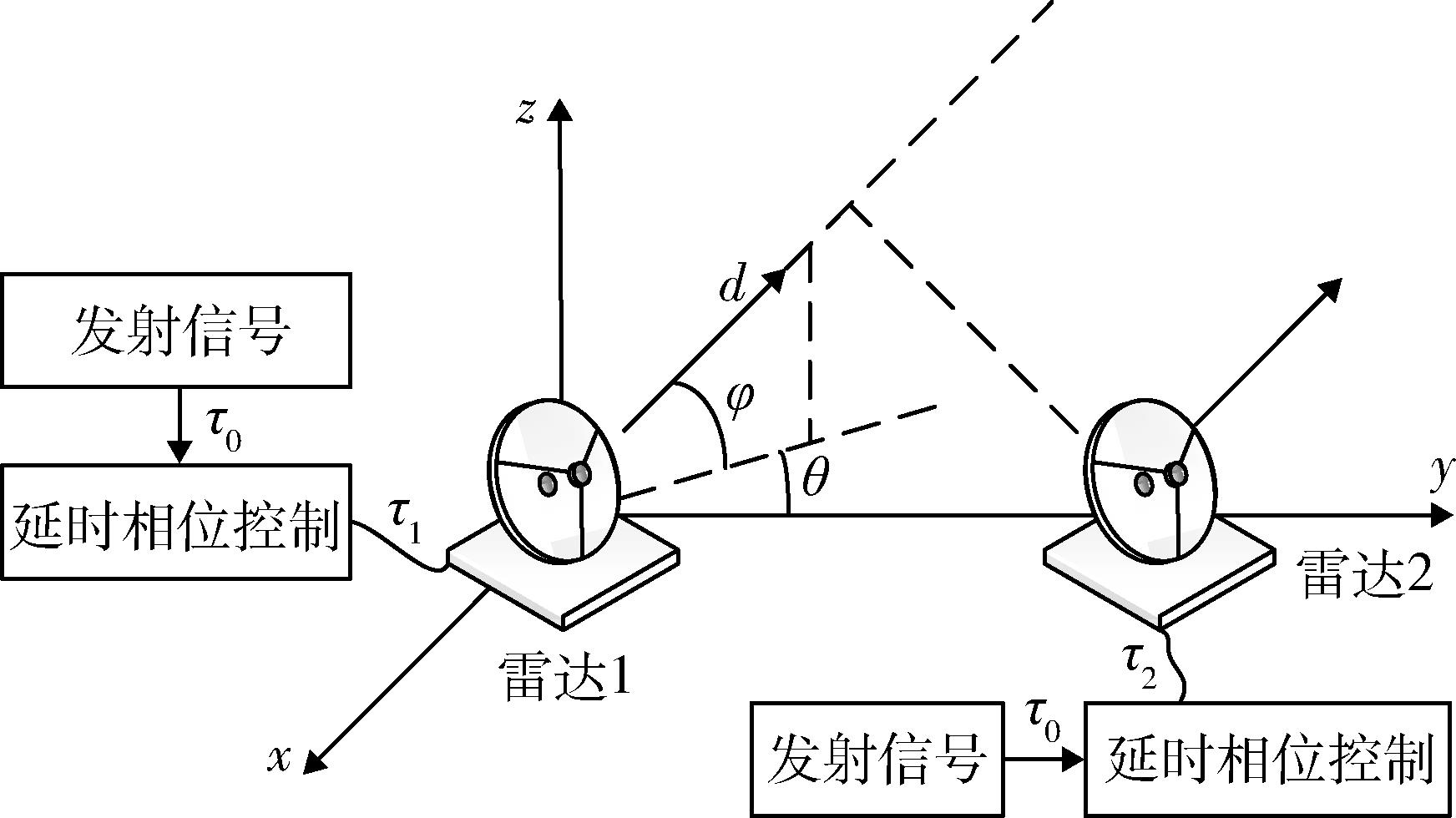
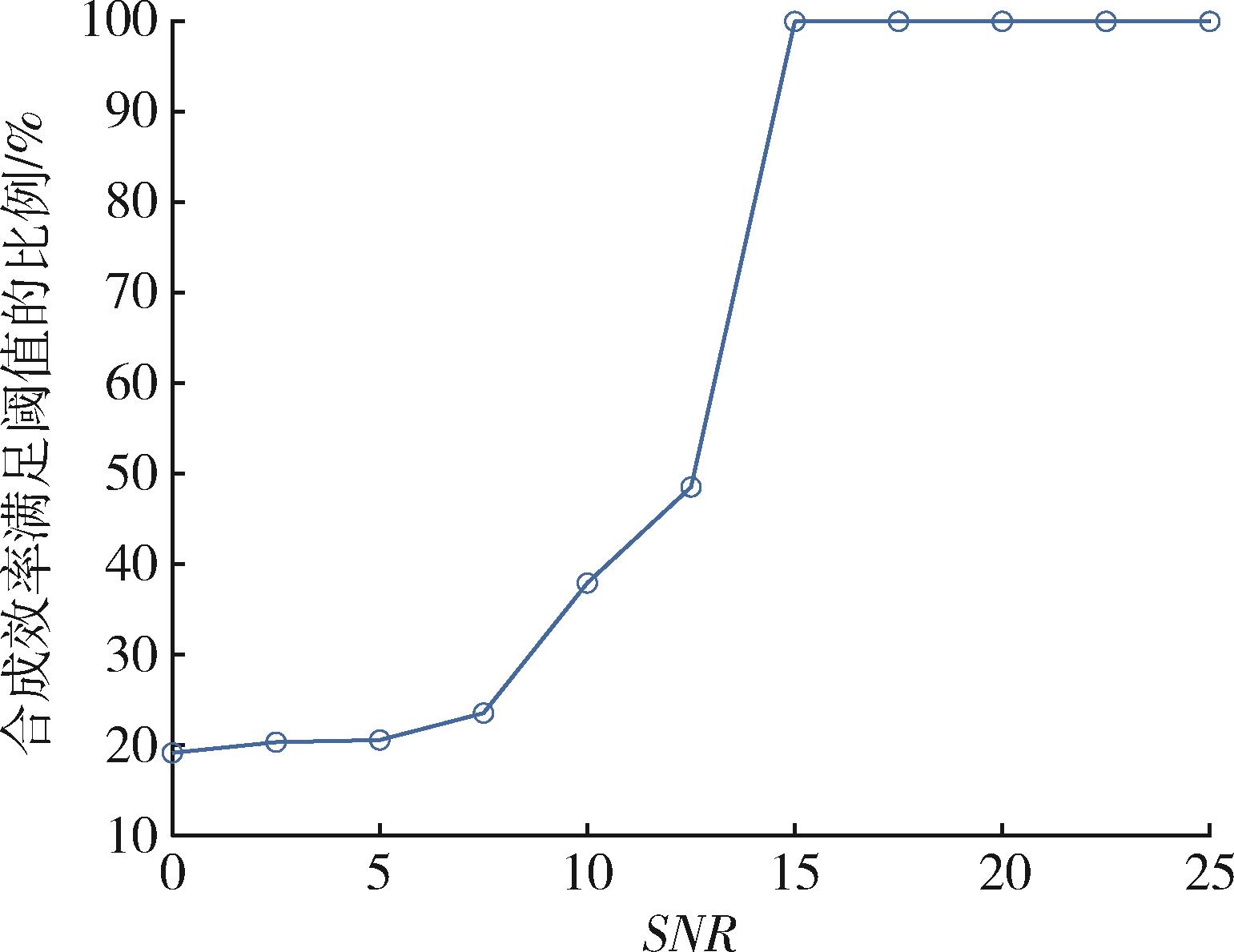
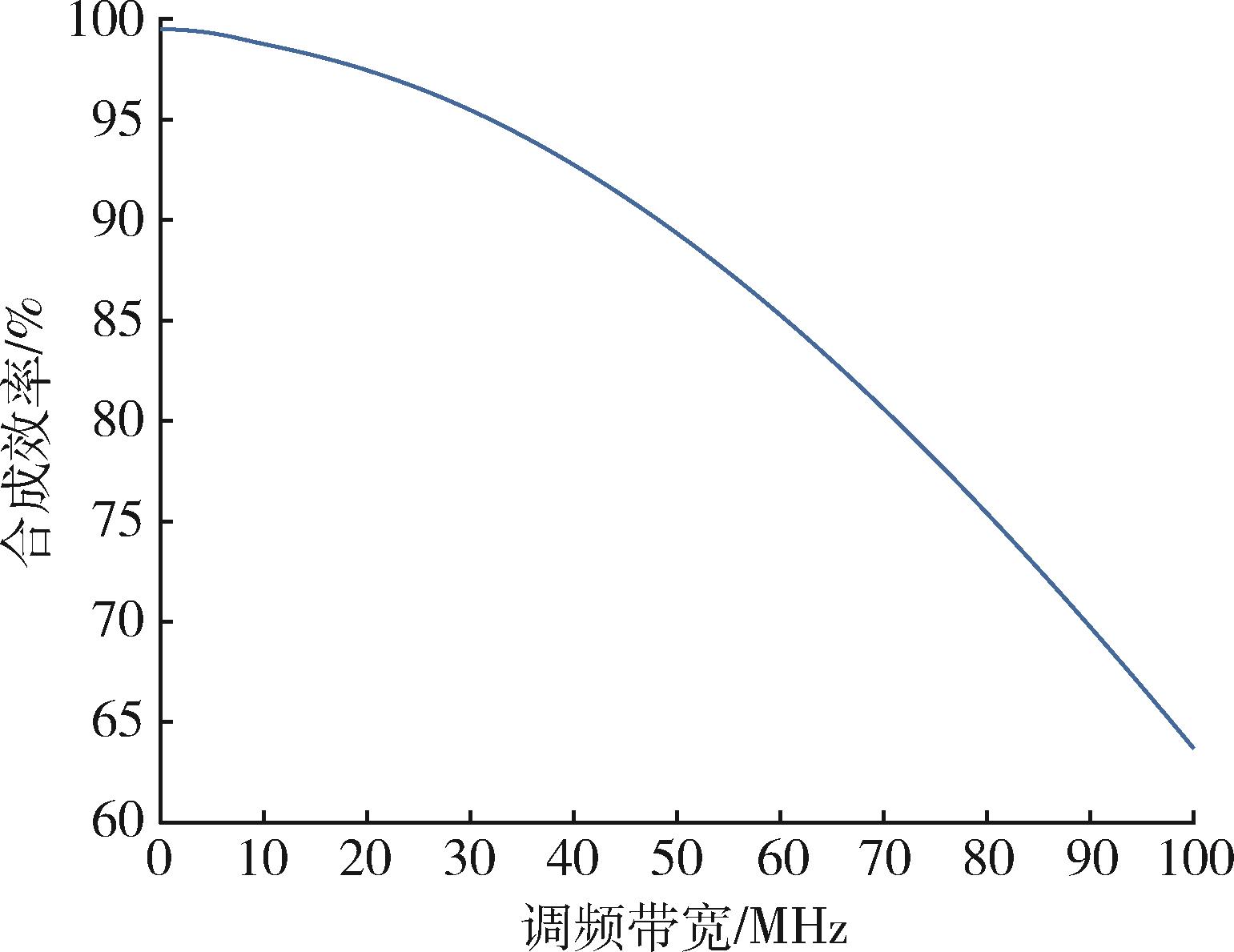
分布式雷达作为新体制雷达,有着机动性强、信噪比增益高等特点,其雷达架构可分为开环架构和闭环架构2种,前者因为拥有更高的适用性和潜力,是近些年来研究的热点。开环架构分布式雷达实现的难点在于时间、相位同步误差和基线标定误差等误差因素导致单元雷达信号的退相参化。由于分布式雷达的孔径稀疏性,难以有效地对开环架构下的误差进行校正。针对上述问题,分析了开环架构下的误差因素,建立了相应的误差模型。为了更高效地实现对误差的估计,提出了一种基于粒子群算法的误差估计方法,最终通过仿真实验验证了方法的正确性,获得了合成效率与标校信噪比的对应关系,为分布式雷达开环架构的工程实现提供了参考。
中图分类号: