

现代防御技术 ›› 2026, Vol. 54 ›› Issue (1): 14-29.DOI: 10.3969/j.issn.1009-086x.2026.01.002
常绪成1, 张心慧2, 党帅龙2, 朱锋2, 王敬宇2, 徐高涵2
收稿日期:2025-10-13
修回日期:2026-01-04
出版日期:2026-01-28
发布日期:2026-02-11
通讯作者:
张心慧
作者简介:常绪成(1983-),男,山东泰安人,副教授,博士,研究方向为多智能体协同控制。
基金资助:Xucheng CHANG1, Xinhui ZHANG2, Shuailong DANG2, Feng ZHU2, Jingyu WANG2, Gaohan XU2
Received:2025-10-13
Revised:2026-01-04
Online:2026-01-28
Published:2026-02-11
Contact:
Xinhui ZHANG
摘要:
针对传统A*算法在三维复杂环境中搜索效率低、路径平滑度差以及局部避障能力有限的问题,提出一种A*-DWA分层融合算法。该算法基于26邻域节点搜索策略对A*算法进行三维空间拓展,在代价评估函数中引入动态调节项实现权重自适应调整,并结合Douglas-Peucker算法和三次B样条曲线实现路径平滑;融合三维扩展的DWA算法以弥补A*算法局部避障能力的不足,通过运动学解耦构建三维动态窗口模型,并引入余弦相似度改进评价函数,增强实时避障性能;设计动态反馈机制实现全局路径的自适应修正,形成“A*全局规划-DWA局部避障-动态反馈”的闭环优化体系。仿真结果表明,在三维静/动态环境中,A*-DWA分层融合算法的路径长度、规划时间、路径平滑度均显著优于其他对比算法,多场景下避障成功率达90%以上,验证了A*-DWA分层融合算法的有效性。
中图分类号:
常绪成, 张心慧, 党帅龙, 朱锋, 王敬宇, 徐高涵. 面向无人机路径规划的A*-DWA分层融合算法[J]. 现代防御技术, 2026, 54(1): 14-29.
Xucheng CHANG, Xinhui ZHANG, Shuailong DANG, Feng ZHU, Jingyu WANG, Gaohan XU. Research on UAV Path Planning Based on an Improved A*-DWA Hierarchical Fusion Algorithm[J]. Modern Defense Technology, 2026, 54(1): 14-29.
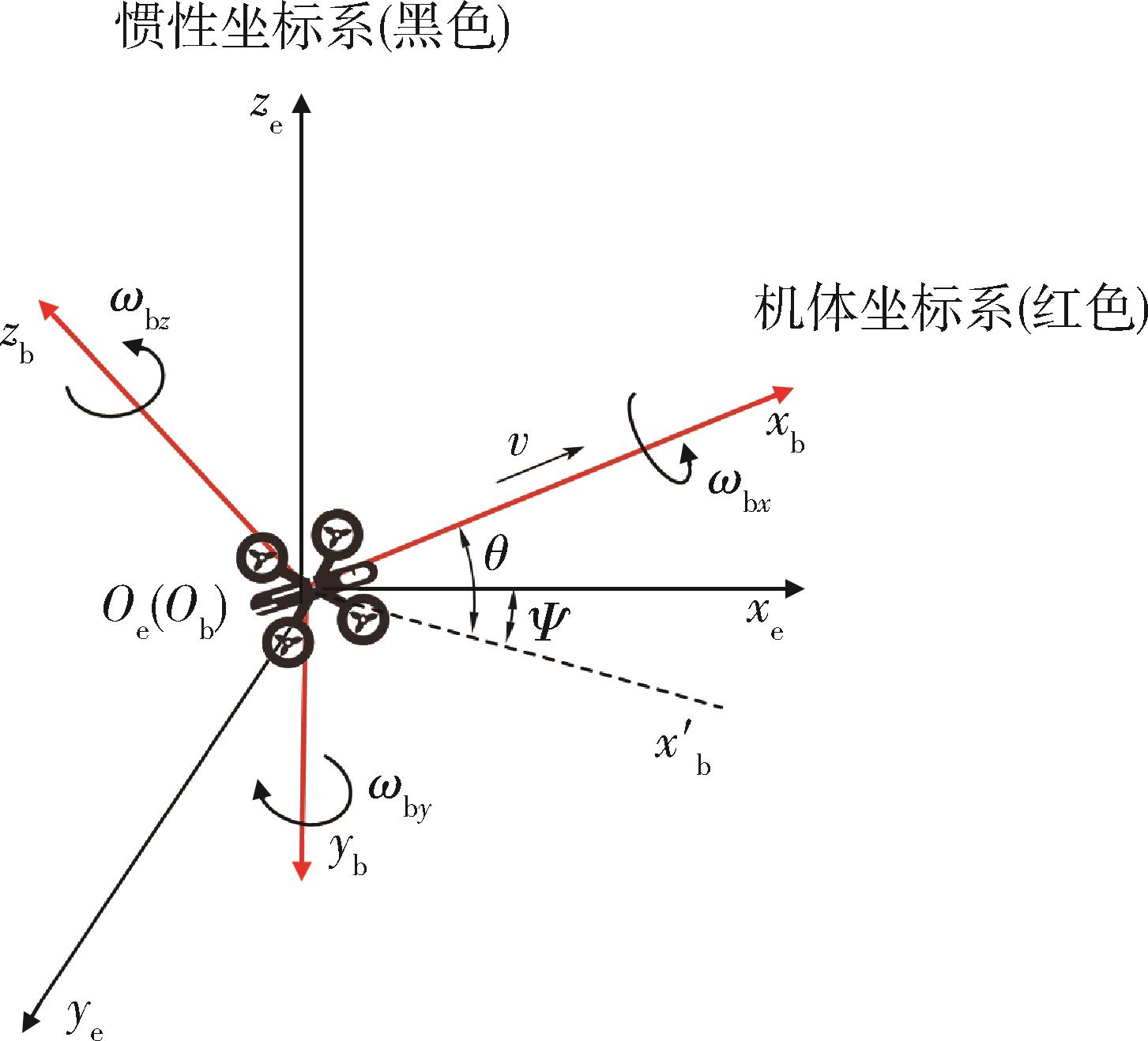
图1 无人机运动学模型
Fig. 1 Kinematic model of unmanned aerial vehicles
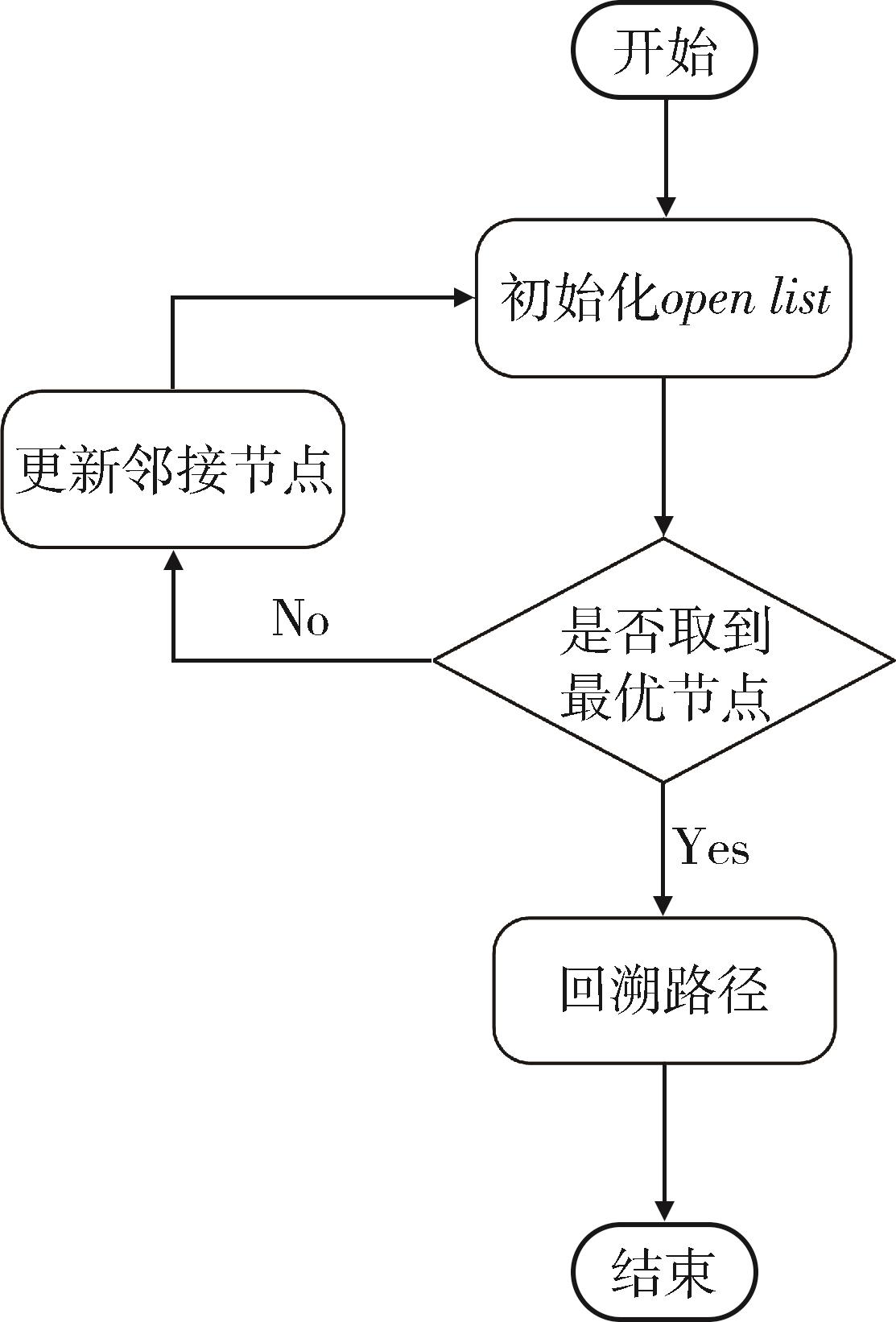
图2 传统A*算法流程图
Fig.2 Traditional A* algorithm diagram
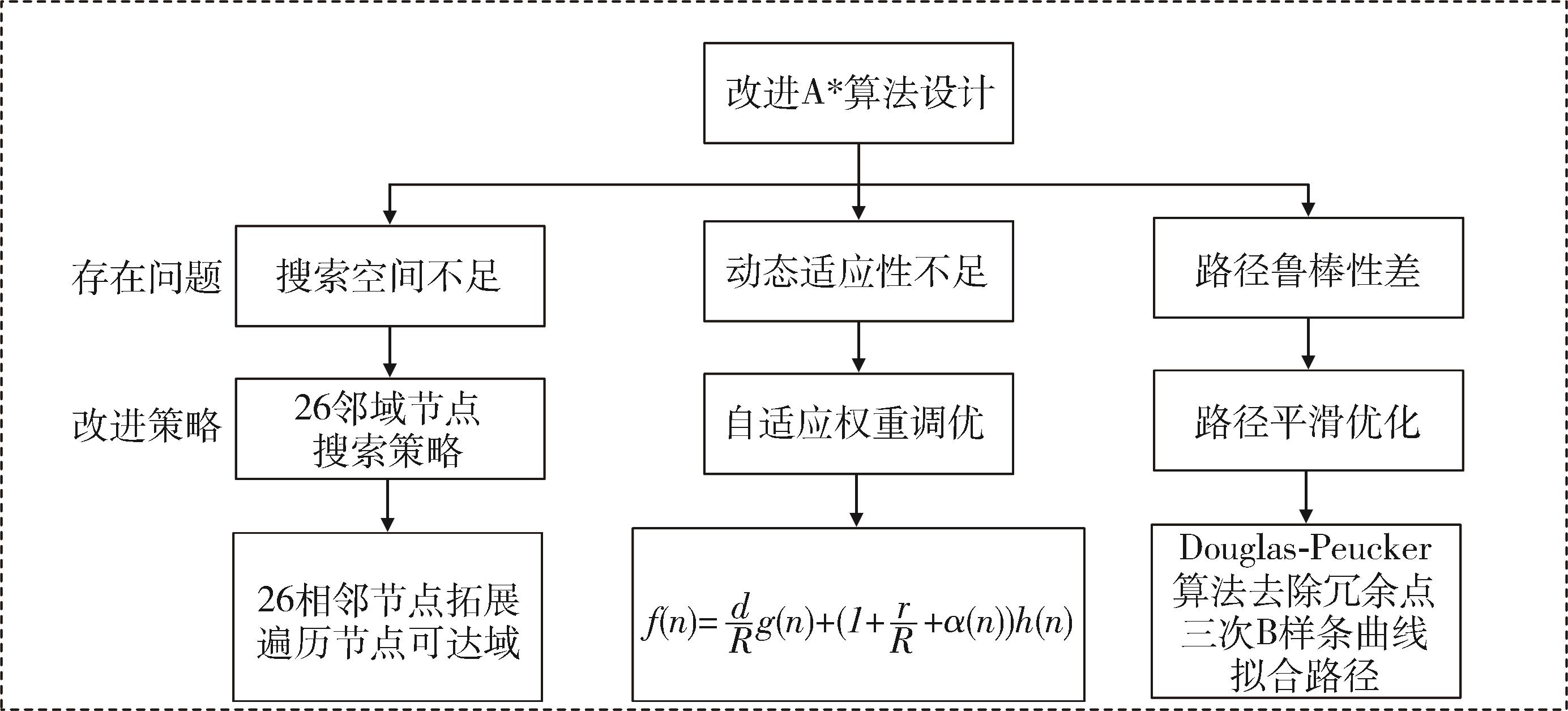
图3 改进A*算法流程图
Fig. 3 Diagram for the improved A* algorithm
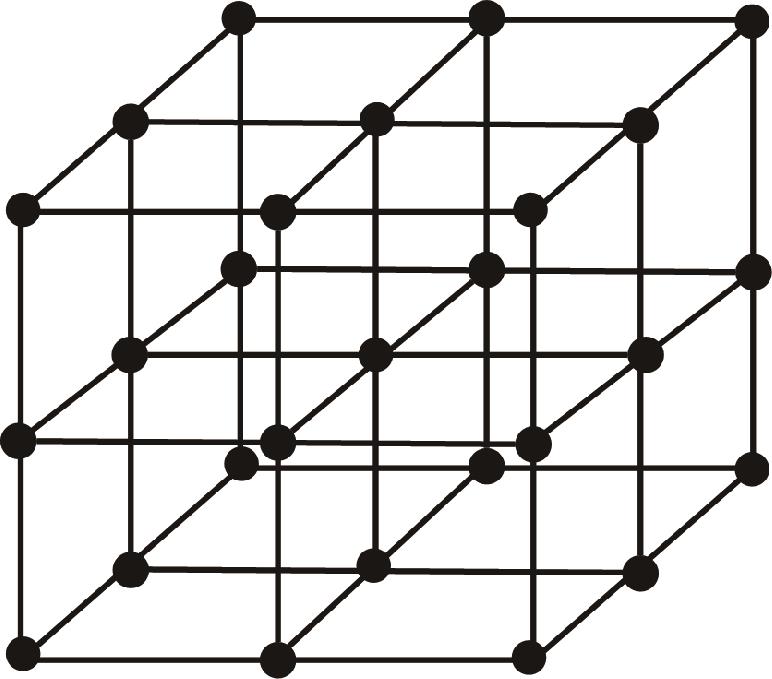
图4 26个相邻节点示意图
Fig.4 Schematic diagram of 26 adjacent nodes
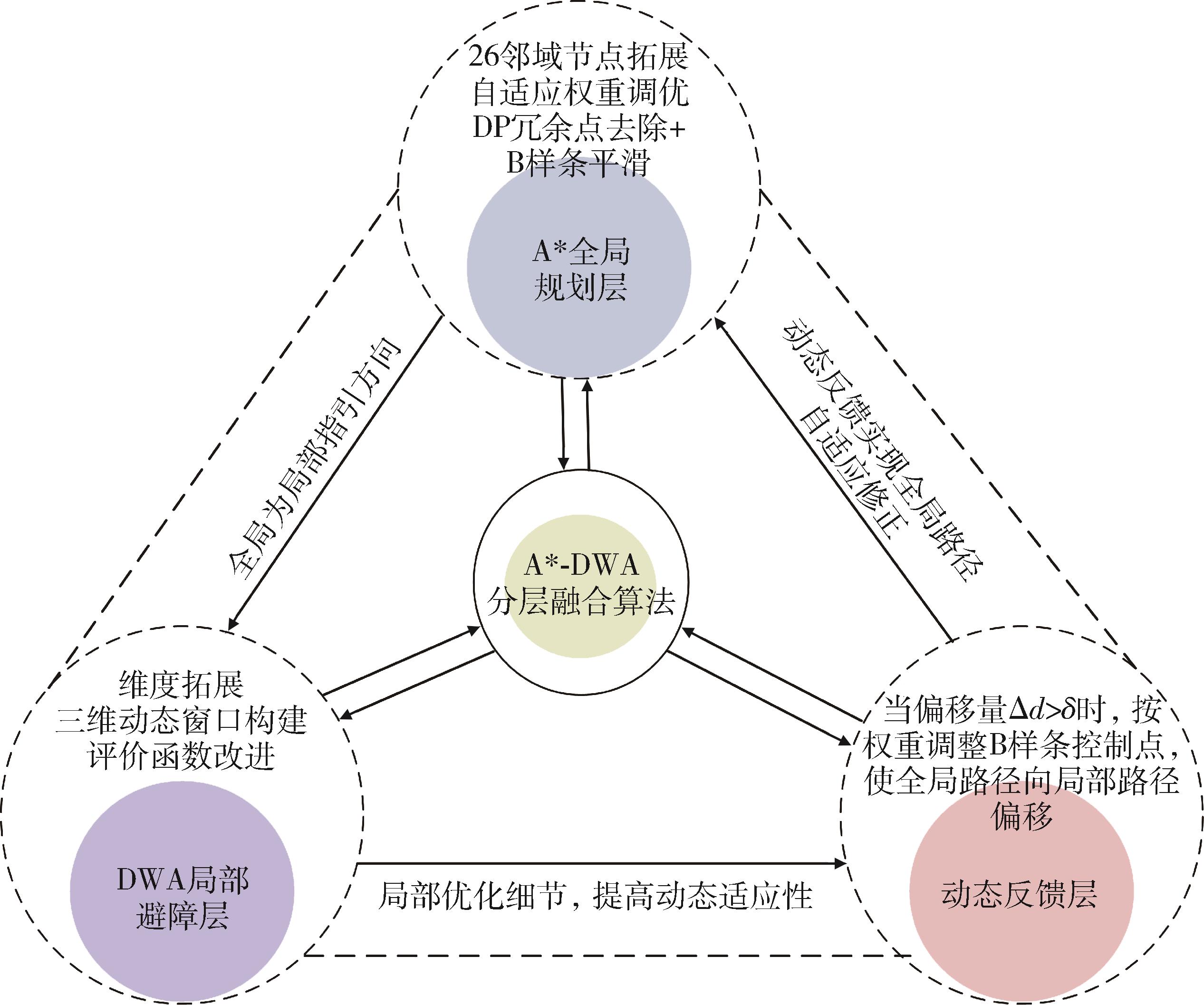
图5 分层融合架构图
Fig.5 Layered convergence architecture diagram
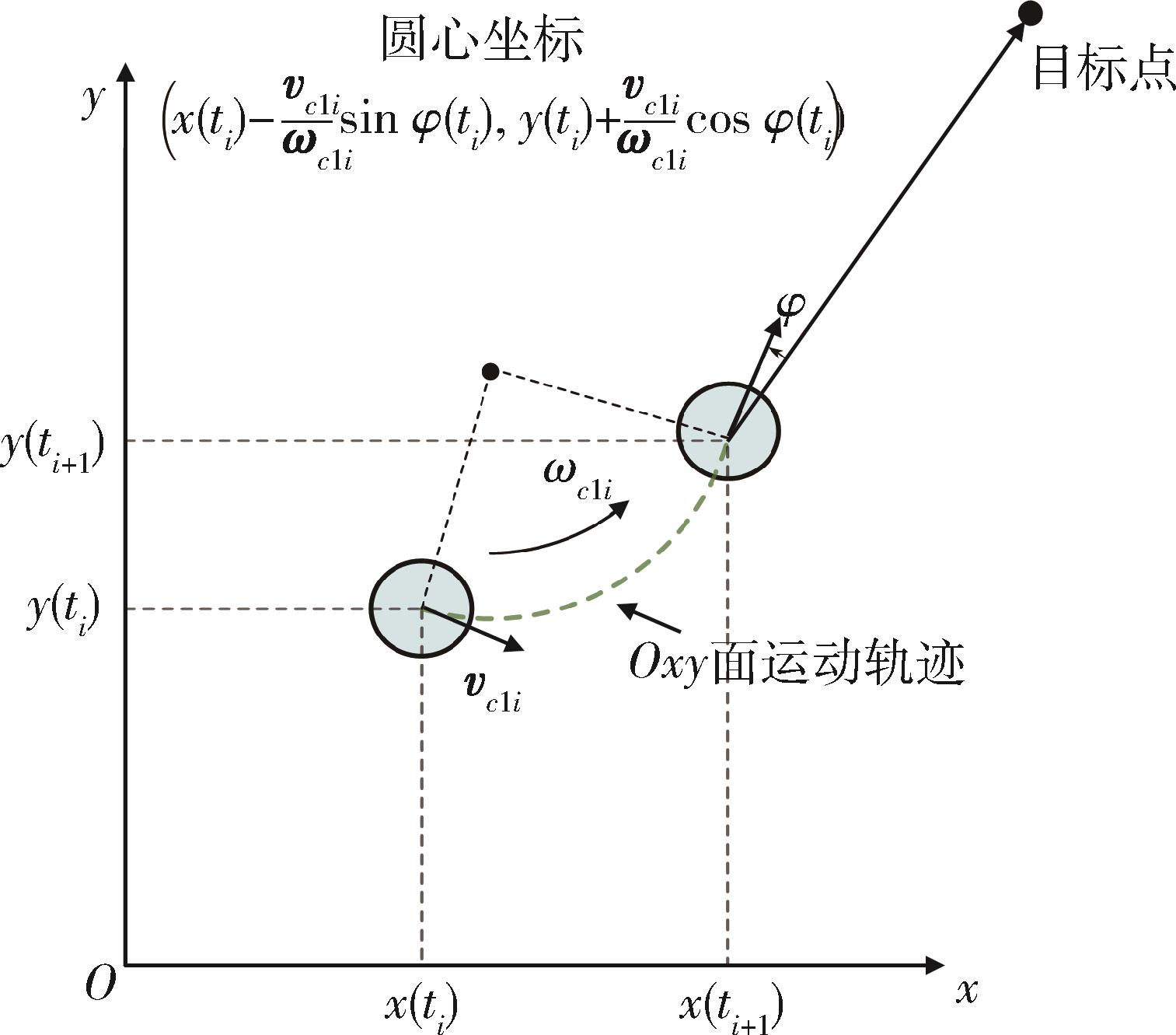
图6 无人机Oxy平面运动轨迹图
Fig. 6 Drone Oxy Plane Movement Trajectory Diagram
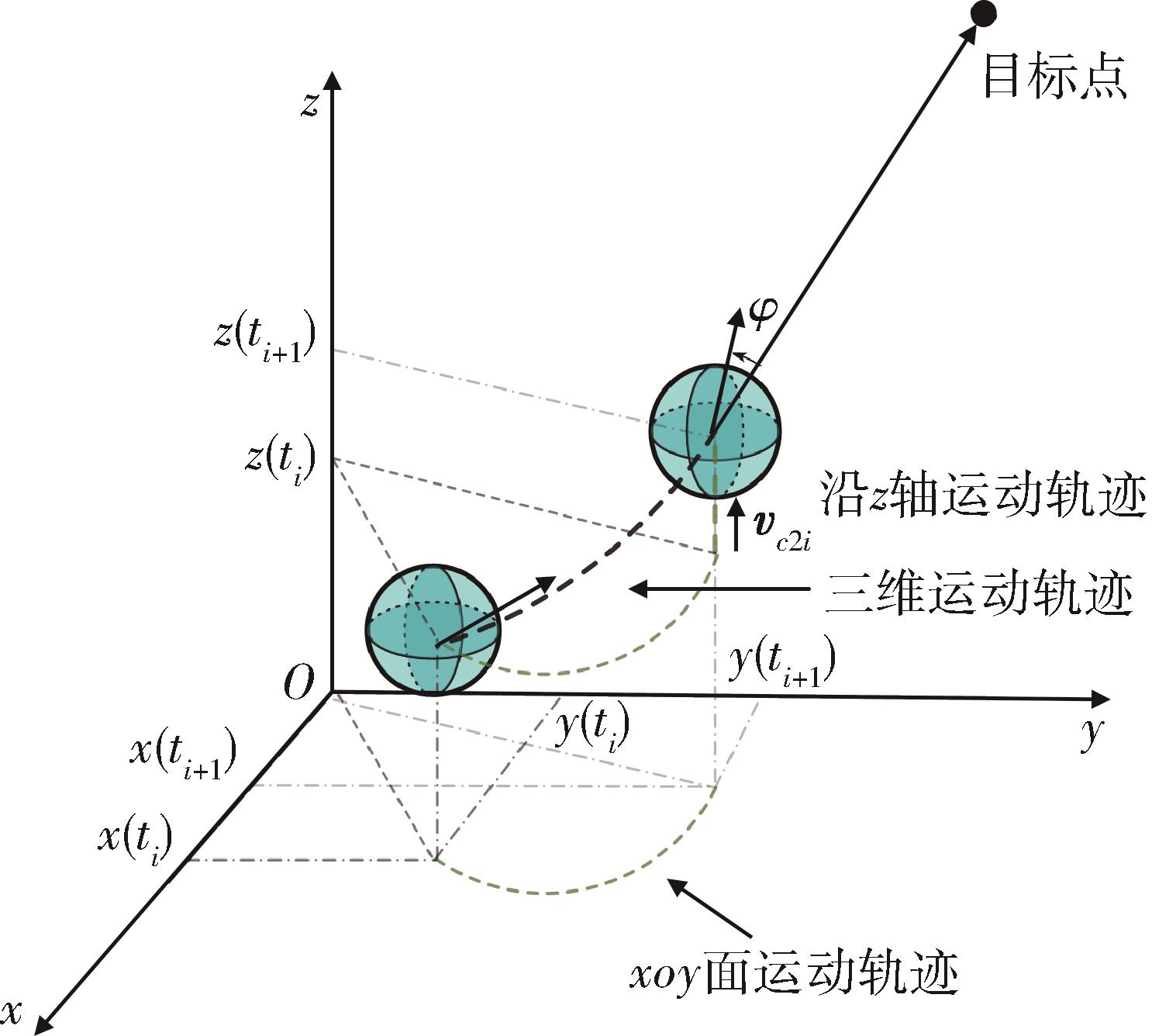
图7 无人机三维空间运动轨迹合成图
Fig. 7 Composite diagram of a drone’s three-dimensional spatial motion trajectory
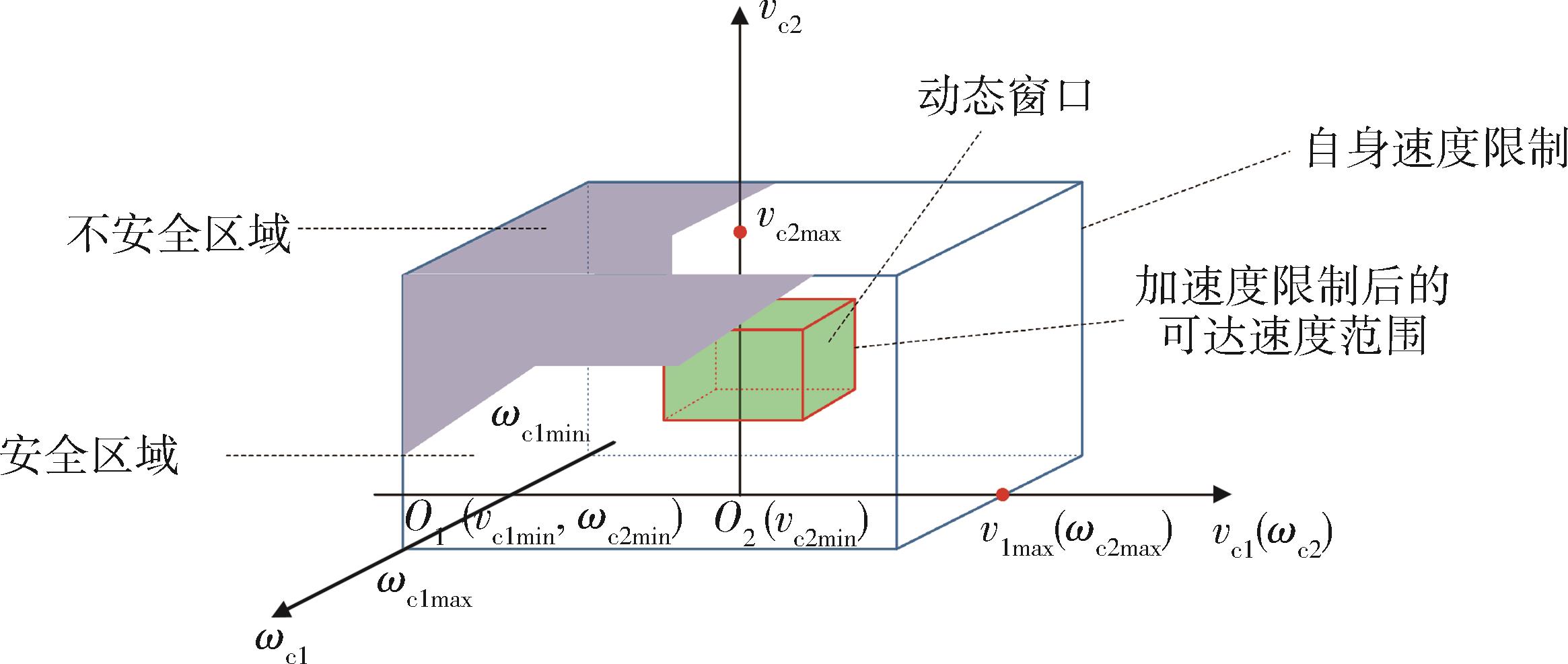
图8 三维动态窗口图
Fig. 8 3D dynamic window diagram
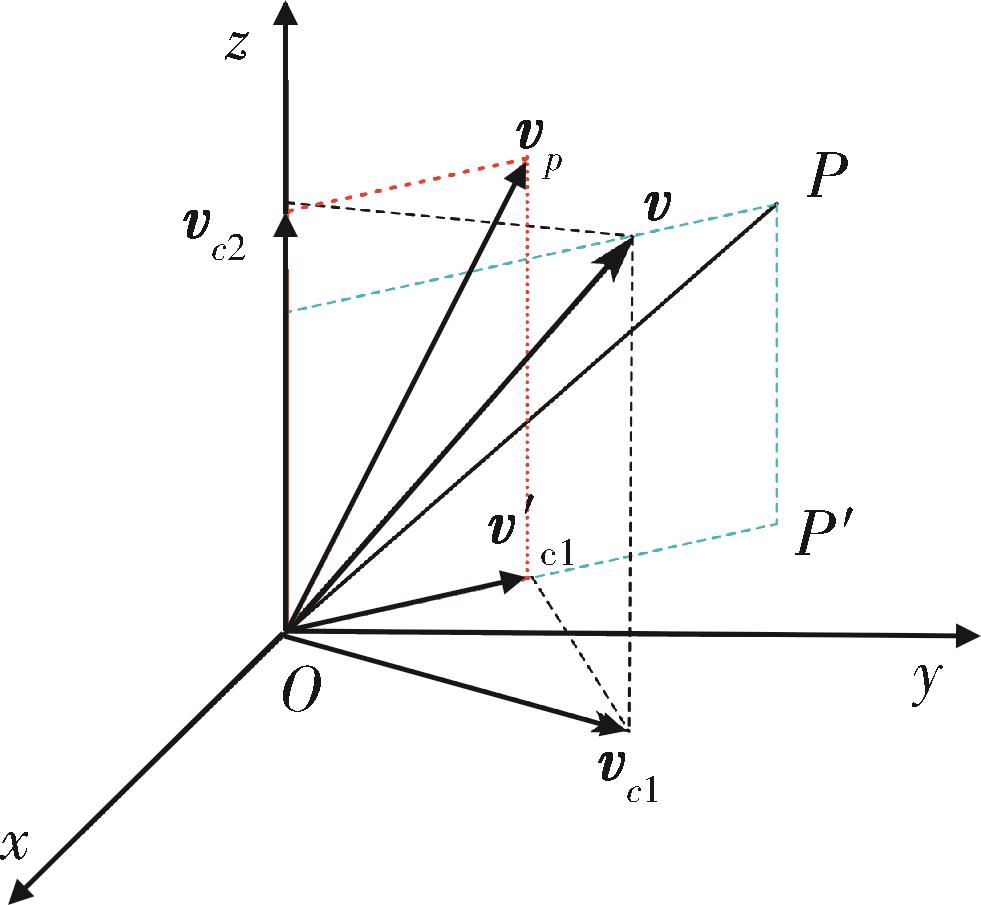
图9 无人机方位角评价项分析图
Fig.9 Drone azimuth evaluation item analysis diagram
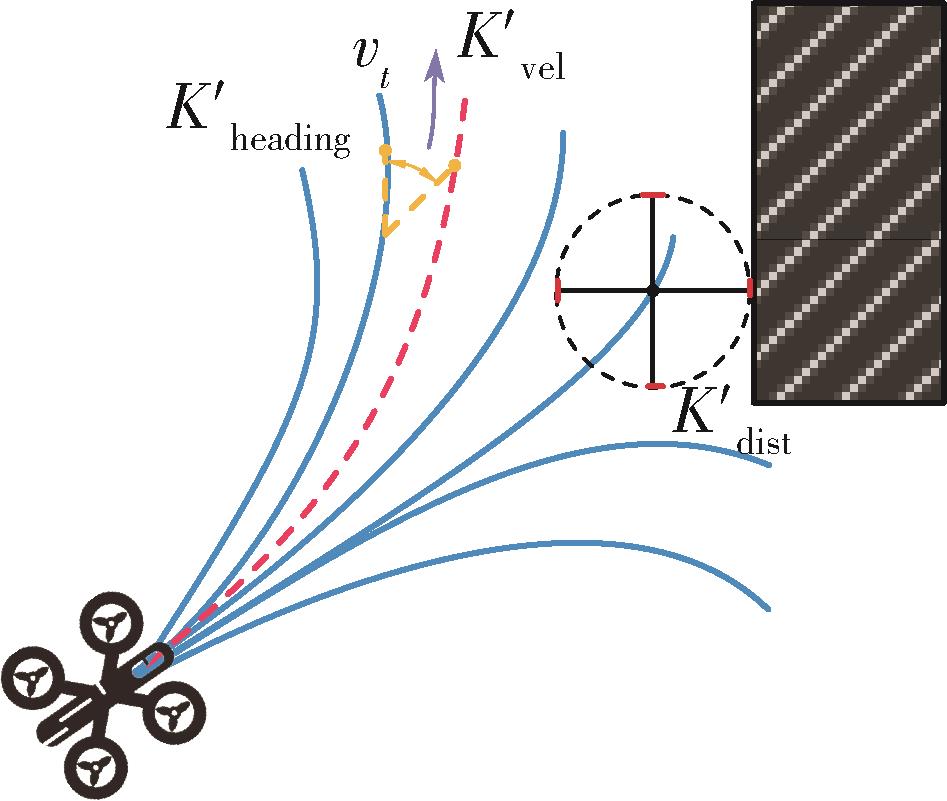
图10 改进评价函数
Fig. 10 Improved evaluation function
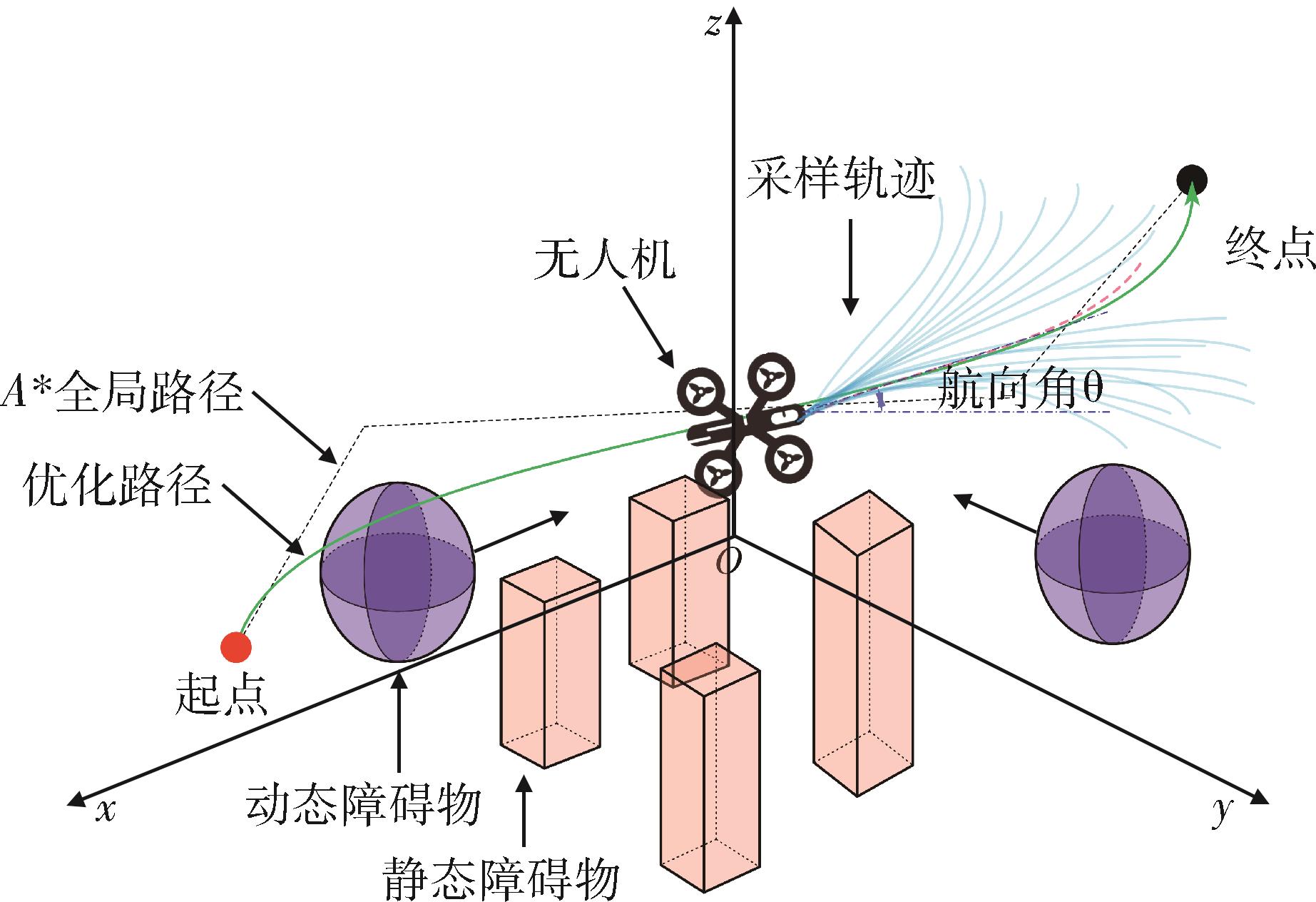
图11 无人机三维路径规划融合算法示意图
Fig. 11 Schematic diagram of the fusion algorithm for UAV 3D path planning
| 参数 | 值 |
|---|---|
| 单位时间/s | 1 |
| 最大线速度/(m·s-1) | 30 |
| 最大绕θ轴角速度/(rad·s-1) | 60 π/180 |
| 最大绕ϕ轴角速度/(rad·s-1) | 60 π/180 |
| 线速度加速度/(m·s-2) | 50 |
| 绕θ轴角加速度/(rad/s-2) | 60 π/180 |
| 绕ϕ轴角加速度/(rad·s-2) | 60 π/180 |
| 距离阈值/m | 2 |
| 最大威胁距离 | 8 |
| 安全距离 | 4 |
| 偏移阈值 | 10 |
| 调整系数 | 0.5 |
表1 仿真参数数据表
Table 1 Simulation parameter data sheet
| 参数 | 值 |
|---|---|
| 单位时间/s | 1 |
| 最大线速度/(m·s-1) | 30 |
| 最大绕θ轴角速度/(rad·s-1) | 60 π/180 |
| 最大绕ϕ轴角速度/(rad·s-1) | 60 π/180 |
| 线速度加速度/(m·s-2) | 50 |
| 绕θ轴角加速度/(rad/s-2) | 60 π/180 |
| 绕ϕ轴角加速度/(rad·s-2) | 60 π/180 |
| 距离阈值/m | 2 |
| 最大威胁距离 | 8 |
| 安全距离 | 4 |
| 偏移阈值 | 10 |
| 调整系数 | 0.5 |
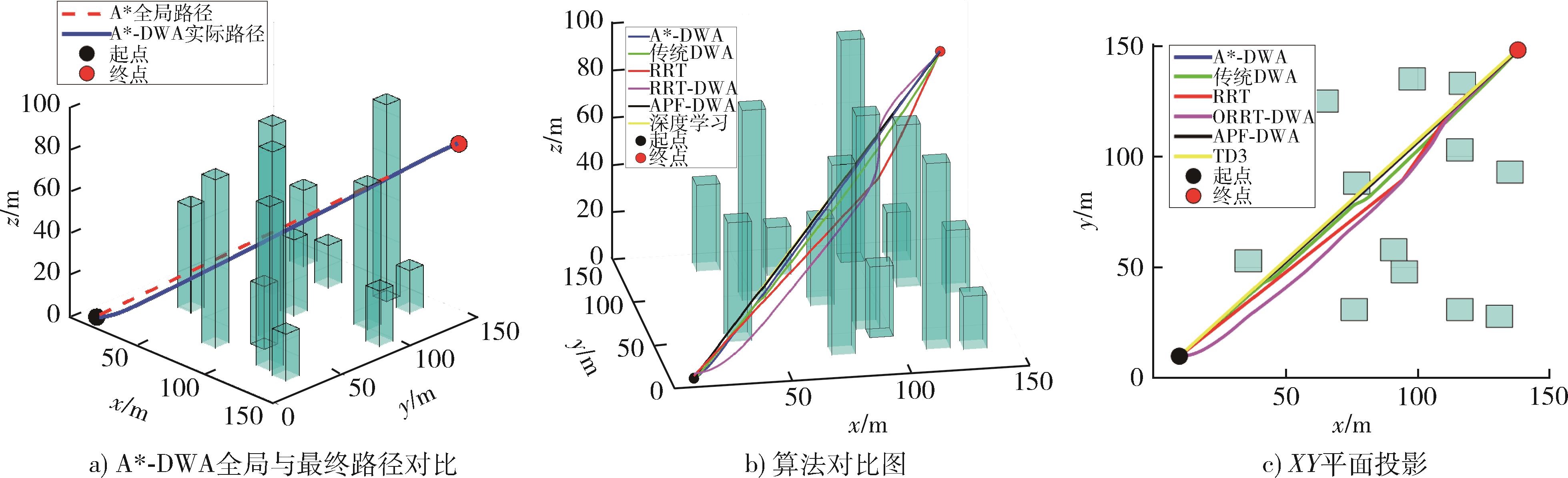
图12 固定静态障碍物路径仿真实验对比图
Fig. 12 Comparison diagram of fixed static obstacle path simulation experiments
| 算法类型 | 路径长度/m | 规划时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 202.06±0.52 | 23.63±0.34 | 0.99 | 100 |
| DWA | 204.23±0.43 | 23.76±0.63 | 0.99 | 95 |
| RRT | 209.78±3.40 | 28.08±0.56 | 0.98±0.01 | 85 |
| RRT-DWA | 208.76±2.20 | 27.68±0.58 | 0.98±0.01 | 95 |
| APF-DWA | 210.82±0.58 | 26.13±0.47 | 0.98±0.02 | 90 |
| TD3 | 204.58±1.32 | 27.34±1.16 | 0.99±0.01 | 95 |
表2 实验数据统计表
Table 2 Experimental data statistics table
| 算法类型 | 路径长度/m | 规划时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 202.06±0.52 | 23.63±0.34 | 0.99 | 100 |
| DWA | 204.23±0.43 | 23.76±0.63 | 0.99 | 95 |
| RRT | 209.78±3.40 | 28.08±0.56 | 0.98±0.01 | 85 |
| RRT-DWA | 208.76±2.20 | 27.68±0.58 | 0.98±0.01 | 95 |
| APF-DWA | 210.82±0.58 | 26.13±0.47 | 0.98±0.02 | 90 |
| TD3 | 204.58±1.32 | 27.34±1.16 | 0.99±0.01 | 95 |
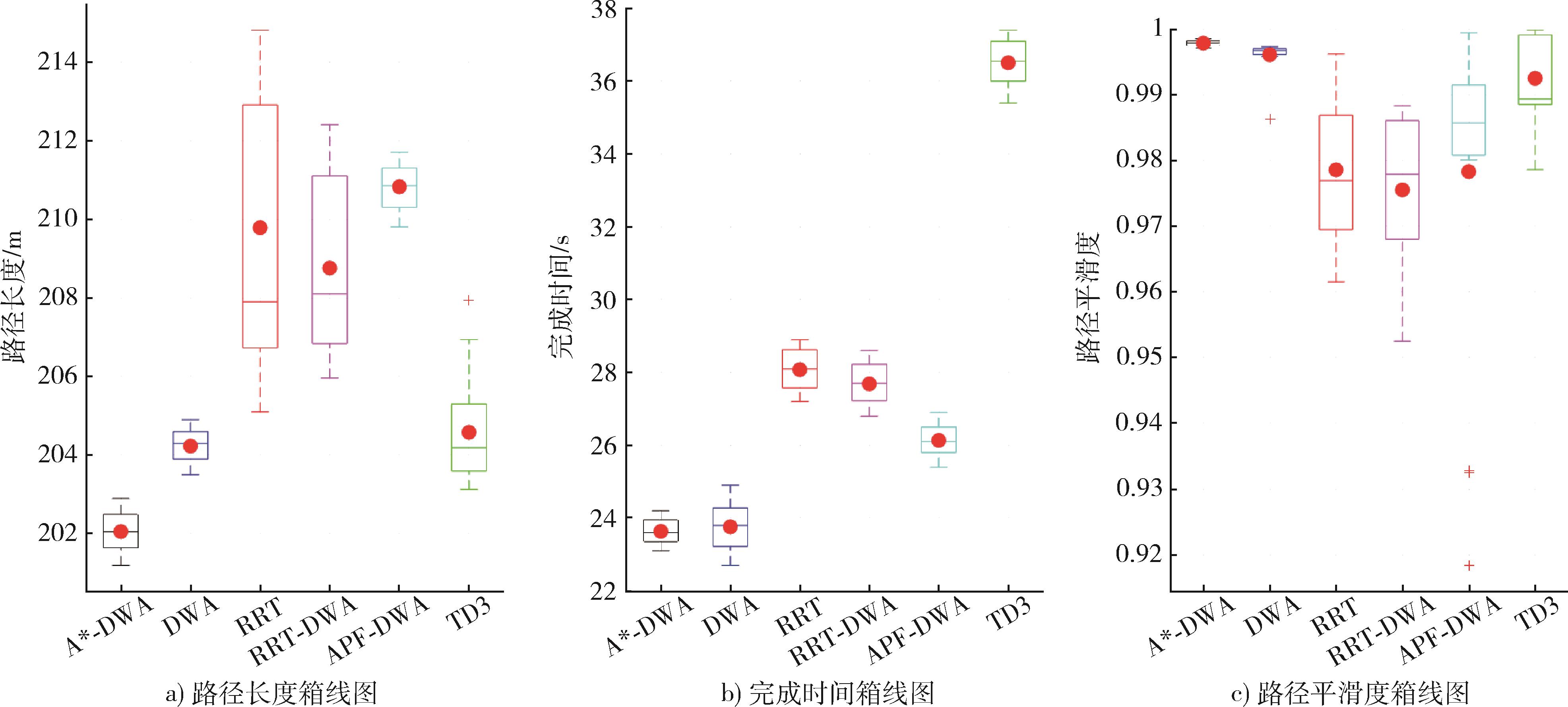
图13 指标对比统计
Fig. 13 Indicator Comparison Statistics
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升 | t值 | p值 | d值 | 性能提升/% | |
| DWA | -14.996 | 1.295 1×10-11 | 4.491 | +1.06 | -0.684 | 5.024 0×10-1 | 0.199 | +0.52 |
| RRT | -9.729 | 4.018 7×10-08 | 3.186 | +3.68 | -71.112 | 1.925 7×10-21 | 9.422 | +15.82 |
| RRT-DWA | -13.042 | 1.305 8×10-10 | 4.172 | +3.21 | -66.307 | 5.787 6×10-23 | 8.578 | +14.63 |
| APF-DWA | -58.727 | 4.484 8×10-21 | 15.963 | +4.16 | -32.292 | 1.066 5×10-16 | 6.152 | +9.56 |
| TD3 | -8.143 | 2.867 3×10-7 | 2.454 | +1.23 | -12.849 | 3.511 7×10-10 | 4.356 | +13.55 |
表3 统计检验汇总表
Table 3 Summary table of statistical tests
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升 | t值 | p值 | d值 | 性能提升/% | |
| DWA | -14.996 | 1.295 1×10-11 | 4.491 | +1.06 | -0.684 | 5.024 0×10-1 | 0.199 | +0.52 |
| RRT | -9.729 | 4.018 7×10-08 | 3.186 | +3.68 | -71.112 | 1.925 7×10-21 | 9.422 | +15.82 |
| RRT-DWA | -13.042 | 1.305 8×10-10 | 4.172 | +3.21 | -66.307 | 5.787 6×10-23 | 8.578 | +14.63 |
| APF-DWA | -58.727 | 4.484 8×10-21 | 15.963 | +4.16 | -32.292 | 1.066 5×10-16 | 6.152 | +9.56 |
| TD3 | -8.143 | 2.867 3×10-7 | 2.454 | +1.23 | -12.849 | 3.511 7×10-10 | 4.356 | +13.55 |
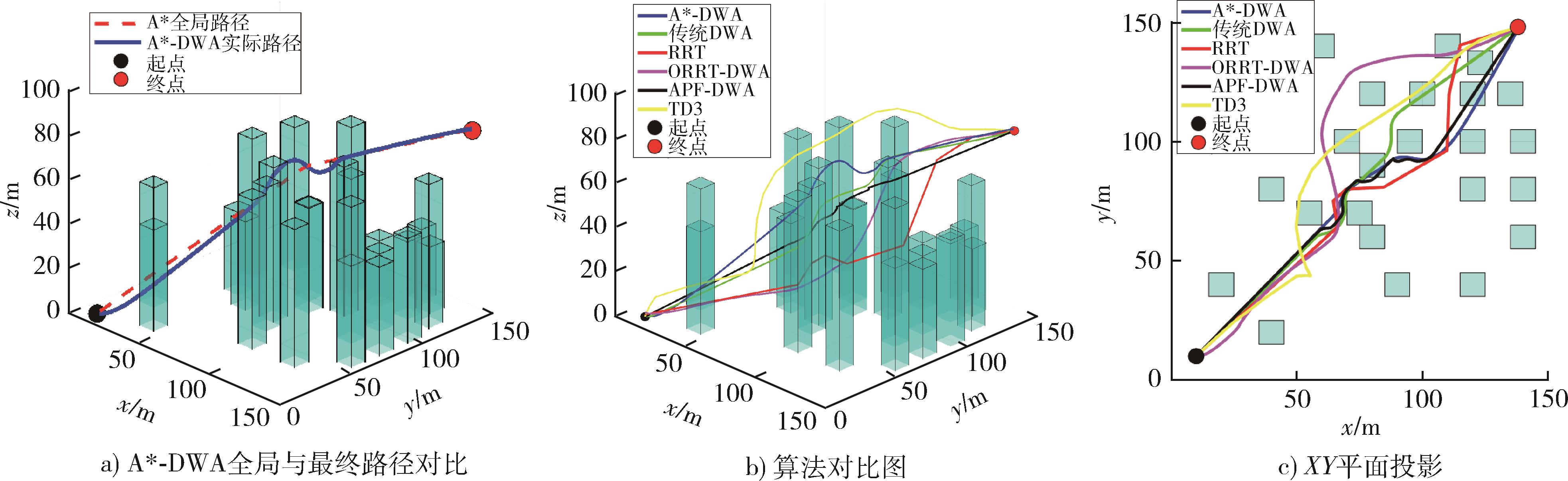
图14 随机静态障碍物路径仿真实验对比图
Fig. 14 Comparison diagram of random static obstacle path simulation experiments
| 算法类型 | 路径长度/m | 完成时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 215.55±3.44 | 28.40±2.43 | 0.94±0.02 | 95 |
| DWA | 218.84±5.78 | 42.46±5.29 | 0.92±0.03 | 75 |
| RRT | 227.17±8.92 | 37.36±5.22 | 0.87±0.04 | 85 |
| RRT-DWA | 223.65±7.83 | 40.65±5.82 | 0.91±0.04 | 90 |
| APF-DWA | 220.69±3.93 | 41.43±3.74 | 0.82±0.07 | 85 |
| TD3 | 232.74±8.64 | 39.56±4.94 | 0.84±0.03 | 80 |
表4 实验数据统计表
Table 4 Experimental data statistics table
| 算法类型 | 路径长度/m | 完成时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 215.55±3.44 | 28.40±2.43 | 0.94±0.02 | 95 |
| DWA | 218.84±5.78 | 42.46±5.29 | 0.92±0.03 | 75 |
| RRT | 227.17±8.92 | 37.36±5.22 | 0.87±0.04 | 85 |
| RRT-DWA | 223.65±7.83 | 40.65±5.82 | 0.91±0.04 | 90 |
| APF-DWA | 220.69±3.93 | 41.43±3.74 | 0.82±0.07 | 85 |
| TD3 | 232.74±8.64 | 39.56±4.94 | 0.84±0.03 | 80 |
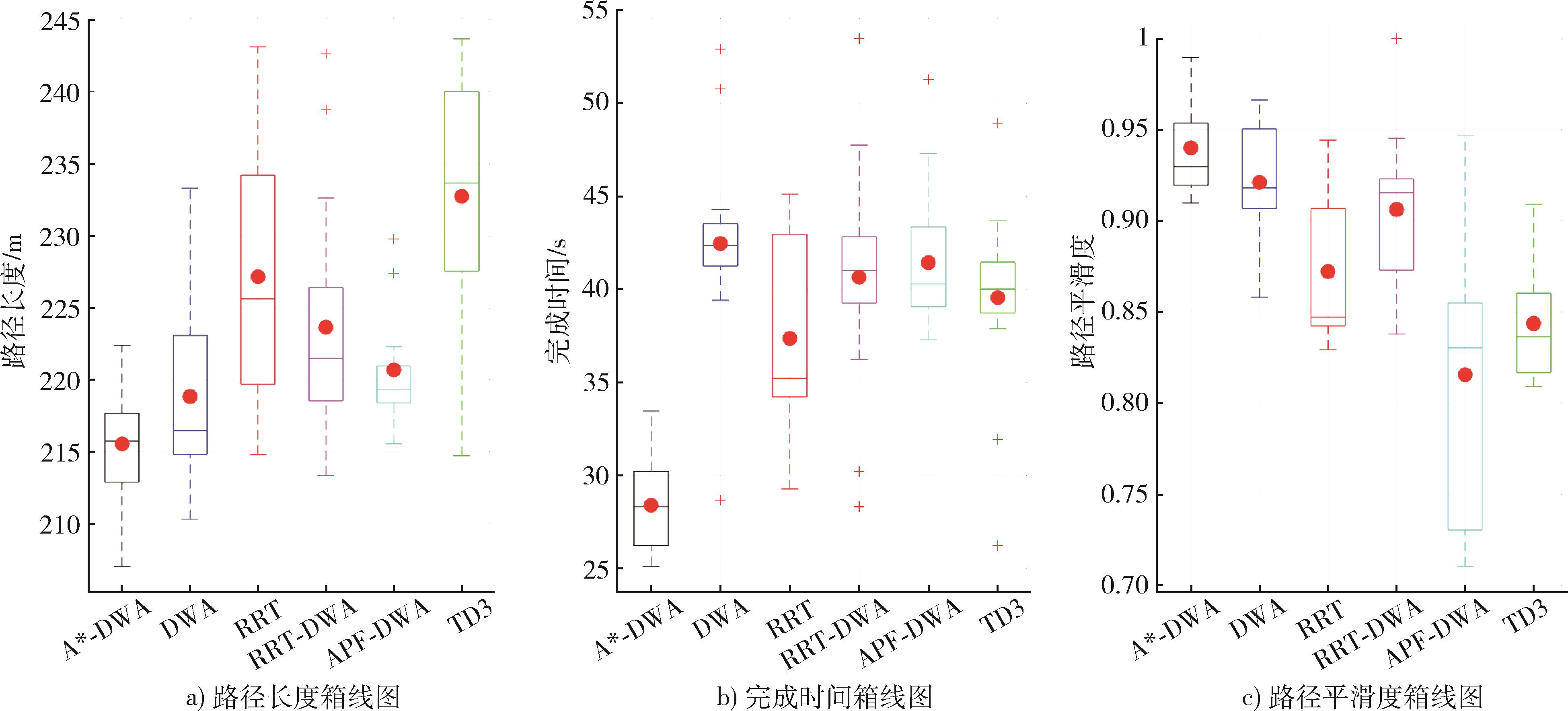
图15 指标对比统计
Fig. 15 Indicator comparison statistics
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升 | t值 | p值 | d值 | 性能提升/% | |
| DWA | -1.469 | 1.655 2×10-1 | 0.689 | +1.51 | -9.392 | 3.704 6×10-7 | 3.683 | +33.10 |
| RRT | -4.421 | 4.957 9×10-4 | 1.715 | +5.11 | -8.241 | 3.764 2×10-7 | 2.360 | +23.98 |
| RRT-DWA | -4.265 | 5.233 4×10-4 | 1.295 | +3.62 | -8.374 | 3.048 2e×10-7 | 2.685 | +30.13 |
| APF-DWA | -5.410 | 5.784 7×10-5 | 1.396 | +2.33 | -15.133 | 1.714 3×10-10 | 4.347 | +31.45 |
| TD3 | -6.668 | 1.065 3×10-5 | 2.550 | +7.39 | -6.875 | 7.624 ×10-6 | 2.811 | +28.19 |
表5 统计检验汇总表
Table 5 Summary table of statistical tests
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升 | t值 | p值 | d值 | 性能提升/% | |
| DWA | -1.469 | 1.655 2×10-1 | 0.689 | +1.51 | -9.392 | 3.704 6×10-7 | 3.683 | +33.10 |
| RRT | -4.421 | 4.957 9×10-4 | 1.715 | +5.11 | -8.241 | 3.764 2×10-7 | 2.360 | +23.98 |
| RRT-DWA | -4.265 | 5.233 4×10-4 | 1.295 | +3.62 | -8.374 | 3.048 2e×10-7 | 2.685 | +30.13 |
| APF-DWA | -5.410 | 5.784 7×10-5 | 1.396 | +2.33 | -15.133 | 1.714 3×10-10 | 4.347 | +31.45 |
| TD3 | -6.668 | 1.065 3×10-5 | 2.550 | +7.39 | -6.875 | 7.624 ×10-6 | 2.811 | +28.19 |
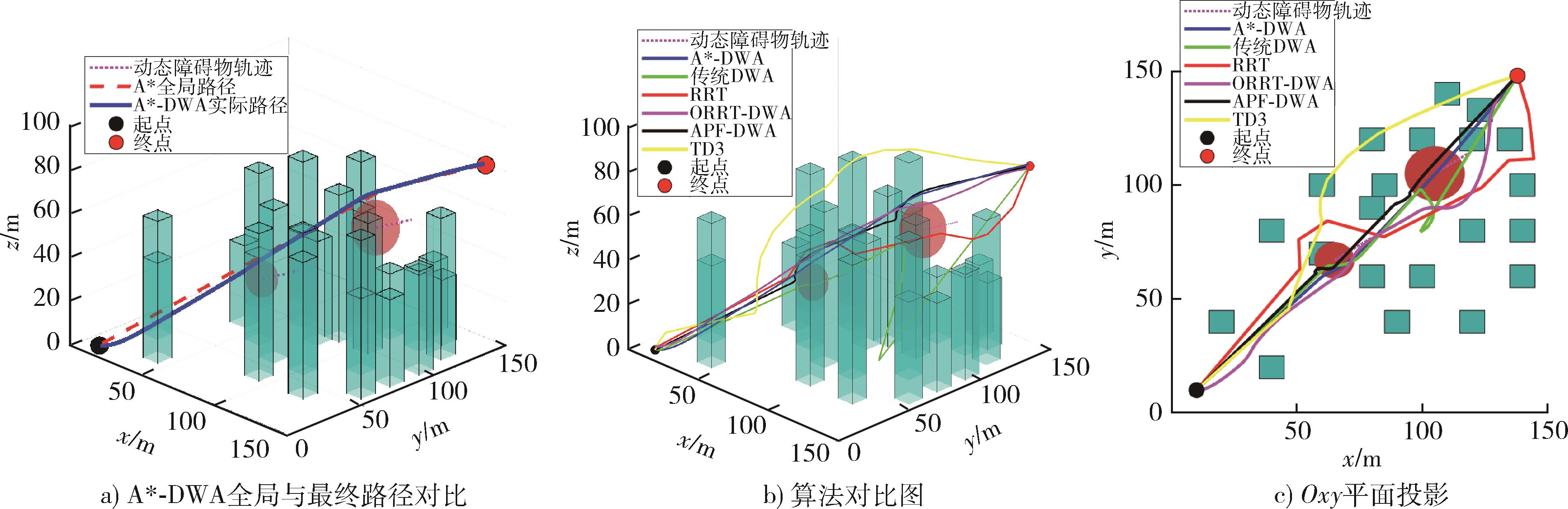
图16 动态障碍物路径仿真实验对比图
Fig. 16 Dynamic obstacle path simulation comparison diagram
| 算法类型 | 路径长度/m | 规划时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 219.01±6.21 | 28.50±2.26 | 0.94±0.03 | 90 |
| DWA | 250.83±28.31 | 42.55±5.48 | 0.89±0.08 | 65 |
| RRT | 230.27±11.17 | 37.35±5.52 | 0.85±0.03 | 70 |
| RRT-DWA | 221.03±5.56 | 39.41±4.73 | 0.89±0.06 | 80 |
| APF-DWA | 220.46±4.49 | 42.72±3.54 | 0.82±0.06 | 75 |
| TD3 | 233.11±8.22 | 39.79±5.45 | 0.82±0.04 | 70 |
表6 实验数据统计表
Table 6 Experimental data statistics table
| 算法类型 | 路径长度/m | 规划时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 219.01±6.21 | 28.50±2.26 | 0.94±0.03 | 90 |
| DWA | 250.83±28.31 | 42.55±5.48 | 0.89±0.08 | 65 |
| RRT | 230.27±11.17 | 37.35±5.52 | 0.85±0.03 | 70 |
| RRT-DWA | 221.03±5.56 | 39.41±4.73 | 0.89±0.06 | 80 |
| APF-DWA | 220.46±4.49 | 42.72±3.54 | 0.82±0.06 | 75 |
| TD3 | 233.11±8.22 | 39.79±5.45 | 0.82±0.04 | 70 |
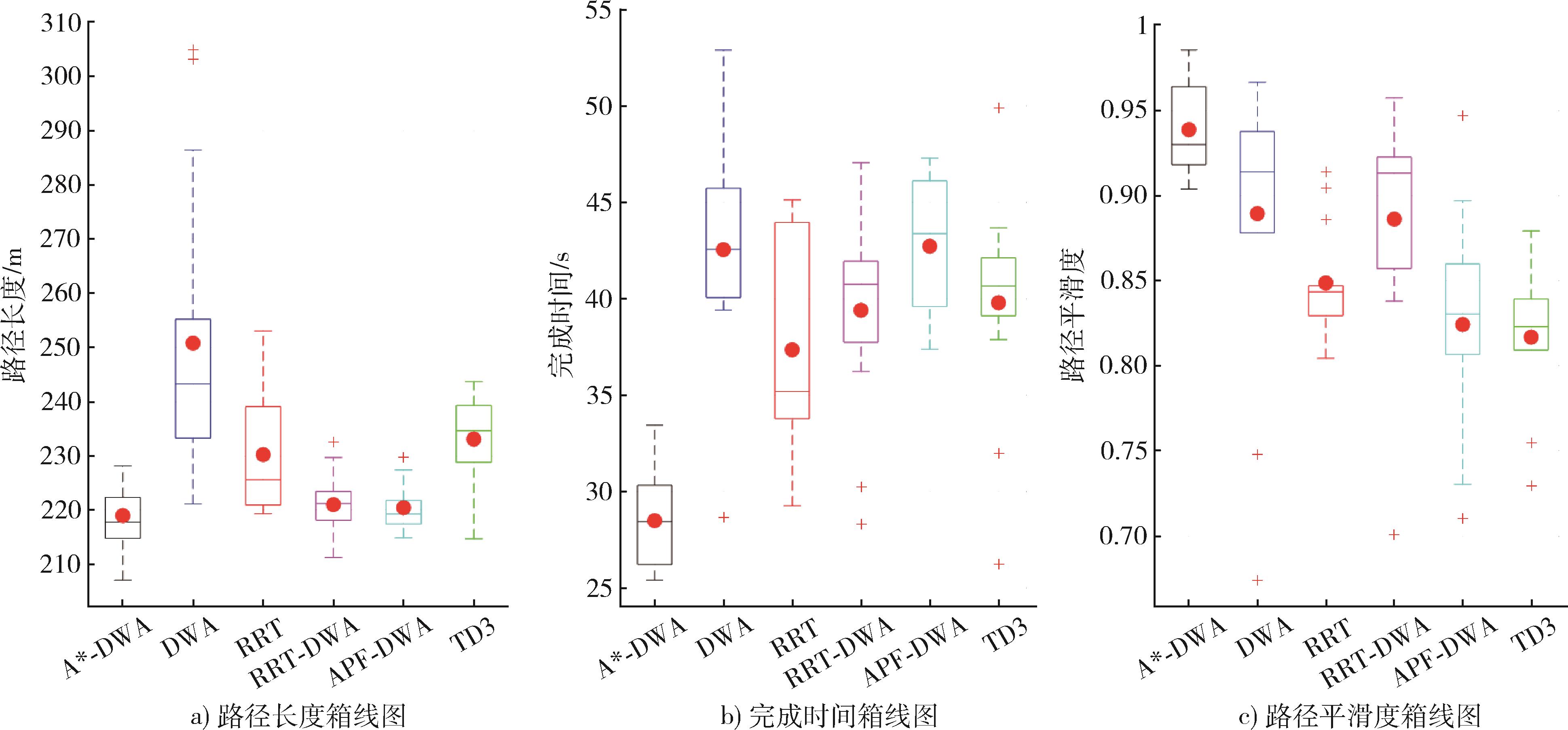
图17 指标对比统计
Fig.17 Indicator comparison statistics
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升/% | t值 | p值 | d值 | 性能提升/% | |
| DWA | -3.745 | 3.235 5×10-3 | 1.575 | +12.69 | -10.279 | 5.610 3×10-7 | 3.671 | +33.01 |
| RRT | -3.352 | 6.450 4×10-3 | 1.282 | +4.89 | -6.278 | 4.077 7×10-5 | 2.178 | +23.70 |
| RRT-DWA | -1.068 | 3.025 0×10-1 | 0.402 | +0.91 | -8.448 | 7.218 0×10-7 | 2.809 | +27.68 |
| APF-DWA | -1.547 | 1.459 6×10-1 | 0.425 | +0.66 | -14.159 | 7.506 6×10-9 | 5.133 | +33.29 |
| TD3 | -3.923 | 2.379 5×10-3 | 1.628 | +6.05 | -5.878 | 1.064 6×10-4 | 2.669 | +28.38 |
表7 统计检验汇总表
Table 7 Summary Table of Statistical Tests
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升/% | t值 | p值 | d值 | 性能提升/% | |
| DWA | -3.745 | 3.235 5×10-3 | 1.575 | +12.69 | -10.279 | 5.610 3×10-7 | 3.671 | +33.01 |
| RRT | -3.352 | 6.450 4×10-3 | 1.282 | +4.89 | -6.278 | 4.077 7×10-5 | 2.178 | +23.70 |
| RRT-DWA | -1.068 | 3.025 0×10-1 | 0.402 | +0.91 | -8.448 | 7.218 0×10-7 | 2.809 | +27.68 |
| APF-DWA | -1.547 | 1.459 6×10-1 | 0.425 | +0.66 | -14.159 | 7.506 6×10-9 | 5.133 | +33.29 |
| TD3 | -3.923 | 2.379 5×10-3 | 1.628 | +6.05 | -5.878 | 1.064 6×10-4 | 2.669 | +28.38 |
| [1] | MOHSAN S A H, OTHMAN N Q H, LI Yanlong, et al. Unmanned Aerial Vehicles (UAVs): Practical Aspects, Applications, Open Challenges, Security Issues, and Future Trends[J]. Intelligent Service Robotics, 2023, 16(1): 109-137. |
| [2] | MOHSAN S A H, KHAN M A, NOOR F, et al. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review[J]. Drones, 2022, 6(6): 147. |
| [3] | SHAKHATREH H, SAWALMEH A H, AL-FUQAHA A, et al. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges[J]. IEEE Access, 2019, 7: 48572-48634. |
| [4] | PATLE B K, BABU L G, PANDEY A, et al. A Review: On Path Planning Strategies for Navigation of Mobile Robot[J]. Defence Technology, 2019, 15(4): 582-606. |
| [5] | DE FILIPPIS L, GUGLIERI G, QUAGLIOTTI F. Path Planning Strategies for UAVS in 3D Environments[J]. Journal of Intelligent & Robotic Systems, 2012, 65(1): 247-264. |
| [6] | ZAFAR M N, MOHANTA J C. Methodology for Path Planning and Optimization of Mobile Robots: A Review[J]. Procedia Computer Science, 2018, 133: 141-152. |
| [7] | 康凯深, 黄海龙. 基于改进的A*算法的复杂环境下路径规划研究[J]. 机械传动, 2025, 49(7): 22-30. |
| KANG Kaishen, HUANG Hailong. Research on Path Planning in Complex Environment Based on Improved A* Algorithm[J]. Journal of Mechanical Transmission, 2025, 49(7): 22-30. | |
| [8] | 翟文鹏, 刘润南, 朱承元. 基于改进Dijkstra算法的滑行路径优化[J]. 中国民航大学学报, 2022, 40(1): 1-6. |
| ZHAI Wenpeng, LIU Runnan, ZHU Chengyuan. Optimization of Taxiway Based on Improved Dijkstra Algorithm[J]. Journal of Civil Aviation University of China, 2022, 40(1): 1-6. | |
| [9] | 杨大庆, 谷侃锋. 基于快速扩展随机树的机械臂路径优化算法研究[J]. 组合机床与自动化加工技术, 2021(5): 10-12, 17. |
| YANG Daqing, GU Kanfeng. Research on Path Optimization Algorithm of Manipulator Based on Fast Expanding Random Tree in Obstacle Environment[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(5): 10-12, 17. | |
| [10] | 贾千禧, 赵旭, 蒙志君. 基于改进DWA的动态环境路径规划算法[J]. 科学技术与工程, 2024, 24(15): 6313-6319. |
| JIA Qianxi, ZHAO Xu, MENG Zhijun. Path Planning Algorithm in Dynamic Environment Based on Improved Dynamic Window Approach[J]. Science Technology and Engineering, 2024, 24(15): 6313-6319. | |
| [11] | 张弛, 魏巍. 基于改进人工势场法的移动机器人路径规划[J]. 系统仿真学报, 2025, 37(11): 2918-2926. |
| ZHANG Chi, WEI Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm[J]. Journal of System Simulation, 2025, 37(11): 2918-2926. | |
| [12] | QURESHI A H, AYAZ Y. Intelligent Bidirectional Rapidly-Exploring Random Trees for Optimal Motion Planning in Complex Cluttered Environments[J]. Robotics and Autonomous Systems, 2015, 68: 1-11. |
| [13] | AGIRREBEITIA J, AVILÉS R, DE BUSTOS I F, et al. A New APF Strategy for Path Planning in Environments with Obstacles[J]. Mechanism and Machine Theory, 2005, 40(6): 645-658. |
| [14] | 孙岩霆, 王荣杰, 蒋德松. 融合A*与DWA算法的水面船艇动态路径规划[J]. 仪器仪表学报, 2024, 45(1): 301-310. |
| SUN Yanting, WANG Rongjie, JIANG Desong. Dynamic Path Planning of Surface Ship by Combining A* and Dynamic Window Algorithm[J]. Chinese Journal of Scientific Instrument, 2024, 45(1): 301-310. | |
| [15] | BAI Xiong, JIANG Haikun, CUI Junjie, et al. UAV Path Planning Based on Improved A∗ and DWA Algorithms[J]. International Journal of Aerospace Engineering, 2021, 2021(1): 4511252. |
| [16] | SANG Wenpeng, YUE Yaoshun, ZHAI Kaiwei, et al. Research on AGV Path Planning Integrating an Improved A* Algorithm and DWA Algorithm[J]. Applied Sciences, 2024, 14(17): 7551. |
| [17] | 贺勇, 侯体成, 曾子望. 融合改进A*和动态窗口法的无人机路径规划[J]. 机械科学与技术, 2025, 44(9): 1668-1676. |
| HE Yong, HOU Ticheng, ZENG Ziwang. UAV Path Planning Algorithm Based on Improved A* and Dynamic Window Approach[J]. Mechanical Science and Technology for Aerospace Engineering, 2025, 44(9): 1668-1676. | |
| [18] | YANG Haixu, XU Xiaoming, HONG Jichao. Automatic Parking Path Planning of Tracked Vehicle Based on Improved A* and DWA Algorithms[J]. IEEE Transactions on Transportation Electrification, 2023, 9(1): 283-292. |
| [19] | CHANG Xucheng, WANG Jingyu, LI Kang, et al. Design of UAV Fusion Obstacle Avoidance Algorithm Based on DWA Algorithm[C]∥Proceedings of 4th 2024 International Conference on Autonomous Unmanned Systems (4th ICAUS 2024). Singapore: Springer Nature Singapore, 2025: 521-533. |
| [20] | ZHONG Xunyu, TIAN Jun, HU Huosheng, et al. Hybrid Path Planning Based on Safe A* Algorithm and Adaptive Window Approach for Mobile Robot in Large-Scale Dynamic Environment[J]. Journal of Intelligent & Robotic Systems, 2020, 99(1): 65-77. |
| [21] | CAO Liling, TANG Lei, CAO Shouqi, et al. Smooth Optimised A*-Guided DWA for Mobile Robot Path Planning[J]. Applied Sciences, 2025, 15(13): 6956. |
| [22] | AHMAD F, KUMAR P, PATIL P P. Modeling and Simulation of a Quadcopter UAV[J]. Nonlinear Studies, 2018, 25(2): 287-299. |
| [23] | 李昱东. 基于RRT-DWA算法的无人机三维动态航迹规划方法研究[D]. 成都: 电子科技大学, 2024. |
| LI Yudong. Research on Three-Dimensional Dynamic Trajectory Planning Method for UAV Based on RRT-DWA Algorithm[D]. Chengdu: University of Electronic Science and Technology of China, 2024. | |
| [24] | CHANG Xucheng, WANG Jingyu, LI Kang, et al. Research on Multi-UAV Autonomous Obstacle Avoidance Algorithm Integrating Improved Dynamic Window Approach and ORCA[J]. Scientific Reports, 2025, 15(1): 14646. |
| [25] | FOX D, BURGARD W, THRUN S. The Dynamic Window Approach to Collision Avoidance[J]. IEEE Robotics & Automation Magazine, 1997, 4(1): 23-33. |
| [26] | CHEN Jiagui, ZHAO Yun, XU Xing. Improved RRT-Connect Based Path Planning Algorithm for Mobile Robots[J]. IEEE Access, 2021, 9: 145988-145999. |
| [27] | WU Yuhang, WANG Qiang, XIAO Yao, et al. Path Planning of Quadruped Robot for Urban Natural Gas Pipe Leakage Inspection Based on Optimized RRT* and DWA Algorithms[J]. International Journal of Metrology and Quality Engineering, 2024, 15: 18. |
| [28] | HU Jinwen, CHENG Changwei, WANG Ce, et al. An Improved Artificial Potential Field Method Based on DWA and Path Optimization[C]∥2019 IEEE International Conference on Unmanned Systems (ICUS). Piscataway: IEEE, 2019: 809-814. |
| [29] | LI Peng, WANG Yuchen, GAO Zhenyan. Path Planning of Mobile Robot Based on Improved TD3 Algorithm[C]∥2022 IEEE International Conference on Mechatronics and Automation (ICMA). Piscataway: IEEE, 2022: 715-720. |
| [1] | 陈晓文, 杨青, 王军民. 强拒止条件下的无人机系统生存策略[J]. 现代防御技术, 2026, 54(1): 1-13. |
| [2] | 冯雪健, 李亦非, 童逸琦, 张燕津. 一种基于改进ARA*的无人机航迹规划算法[J]. 现代防御技术, 2025, 53(6): 101-110. |
| [3] | 李川, 郝燕, 冯新星, 马娜, 马长正, 刘炟, 杨世学. 城市低空无人机防御体系建设思考[J]. 现代防御技术, 2025, 53(6): 12-20. |
| [4] | 张君彪, 吴静, 赵飞, 方丽. 俄乌冲突中无人机作战运用情况及启示[J]. 现代防御技术, 2025, 53(6): 37-45. |
| [5] | 秦钰, 柴华, 杨傅云翔, 白珍. 高功率微波反无人机蜂群的部署优化方法[J]. 现代防御技术, 2025, 53(6): 46-59. |
| [6] | 李宏信, 赵晓葭, 洪振新, 甘立峰, 冯国旭. 无人机经济性设计研制费用优化方法[J]. 现代防御技术, 2025, 53(5): 11-20. |
| [7] | 韦振汉, 唐辉, 杨煜, 廖植泓, 赖启辉, 卢忱. 基于强化学习的多无人机航迹规划[J]. 现代防御技术, 2025, 53(5): 136-144. |
| [8] | 陈庆, 周纯, 刘欣军, 罗瑞君. 方向约束下的无人机有限时间定点编队控制[J]. 现代防御技术, 2025, 53(5): 197-205. |
| [9] | 刘媛媛, 袁荣, 邵书义, 陈谋. 改进鸽群优化的随机森林无人机传感器故障预测技术[J]. 现代防御技术, 2025, 53(5): 215-226. |
| [10] | 刘男. 基于改进PROMETHEE的无人机蜂群威胁评估方法[J]. 现代防御技术, 2025, 53(5): 92-98. |
| [11] | 包勇, 程帅. 反无人机蜂群杀伤链动态构建策略研究[J]. 现代防御技术, 2025, 53(4): 1-9. |
| [12] | 汤佳衡, 肖博漪, 丁晨博, 范恒知, 吕茂隆. 有人/无人机协同对地打击路径规划方法研究[J]. 现代防御技术, 2025, 53(4): 27-35. |
| [13] | 费陈, 赵亮, 李银城, 王树泉, 段正裕. 基于MR-WPA的无人机蜂群多目标打击任务分配[J]. 现代防御技术, 2025, 53(3): 1-10. |
| [14] | 王科翔, 卢野, 李银城, 陈硕, 费陈. 面向海战场下无人集群作战发展研究综述[J]. 现代防御技术, 2025, 53(3): 11-22. |
| [15] | 吴蜜, 陈先桥, 沈卫文. 基于状态观测器的无人机群编队操纵控制[J]. 现代防御技术, 2025, 53(3): 112-119. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
