

现代防御技术 ›› 2026, Vol. 54 ›› Issue (3): 60-70.DOI: 10.3969/j.issn.1009-086x.2026.03.006
收稿日期:2025-05-18
修回日期:2025-09-16
出版日期:2026-06-28
发布日期:2026-07-03
作者简介:于世胜(1979-),男,辽宁东港人。高工,硕士,研究方向为地空导弹指挥控制系统。
Shisheng YU, Ke WANG, Yu SUN, Jinghua NIU
Received:2025-05-18
Revised:2025-09-16
Online:2026-06-28
Published:2026-07-03
摘要:
针对俄乌冲突中,地空导弹阵地在应对小型多旋翼无人机渗透侦察以及引导火力进攻的过程中,暴露出来雷达监控存在近距离盲区、对阵地周边5 km以内的小型多旋翼无人机检测困难、阵地自身防护的脆弱性等问题进行研究。采集小型多旋翼无人机的3类信号,利用FEKO软件进行无人机在不同频段雷达作用下的RCS(radar cross-section)方向图仿真,分析信号的时频域特点,论证了利用这些特征进行有效检测的可行性。采用的SDR(software defined radio)设备可在距离无人机100.33,70.129 m处成功截获识别图传信号,制导雷达利用SDR设备提供的方位信息,快速检测跟踪无人机,比制导雷达独立全空域搜索无人机提高了9 min,验证了该方法的可行性和实用性。经过分析论证,提出射频信号监测+雷达精确定位的检测方法,采用无人机实飞校验,利用SDR设备进行射频信号检测识别和双站测向,制导雷达利用SDR提供的方向信息对无人机进行了精确定位跟踪。
中图分类号:
于世胜, 王可, 孙宇, 牛景华. 地空导弹阵地反小型多旋翼无人机检测方法研究[J]. 现代防御技术, 2026, 54(3): 60-70.
Shisheng YU, Ke WANG, Yu SUN, Jinghua NIU. Research on Detection Methods for Countering Small and Micro Rotary-Wing UAVs at Surface-to-Air Missile Sites[J]. Modern Defense Technology, 2026, 54(3): 60-70.
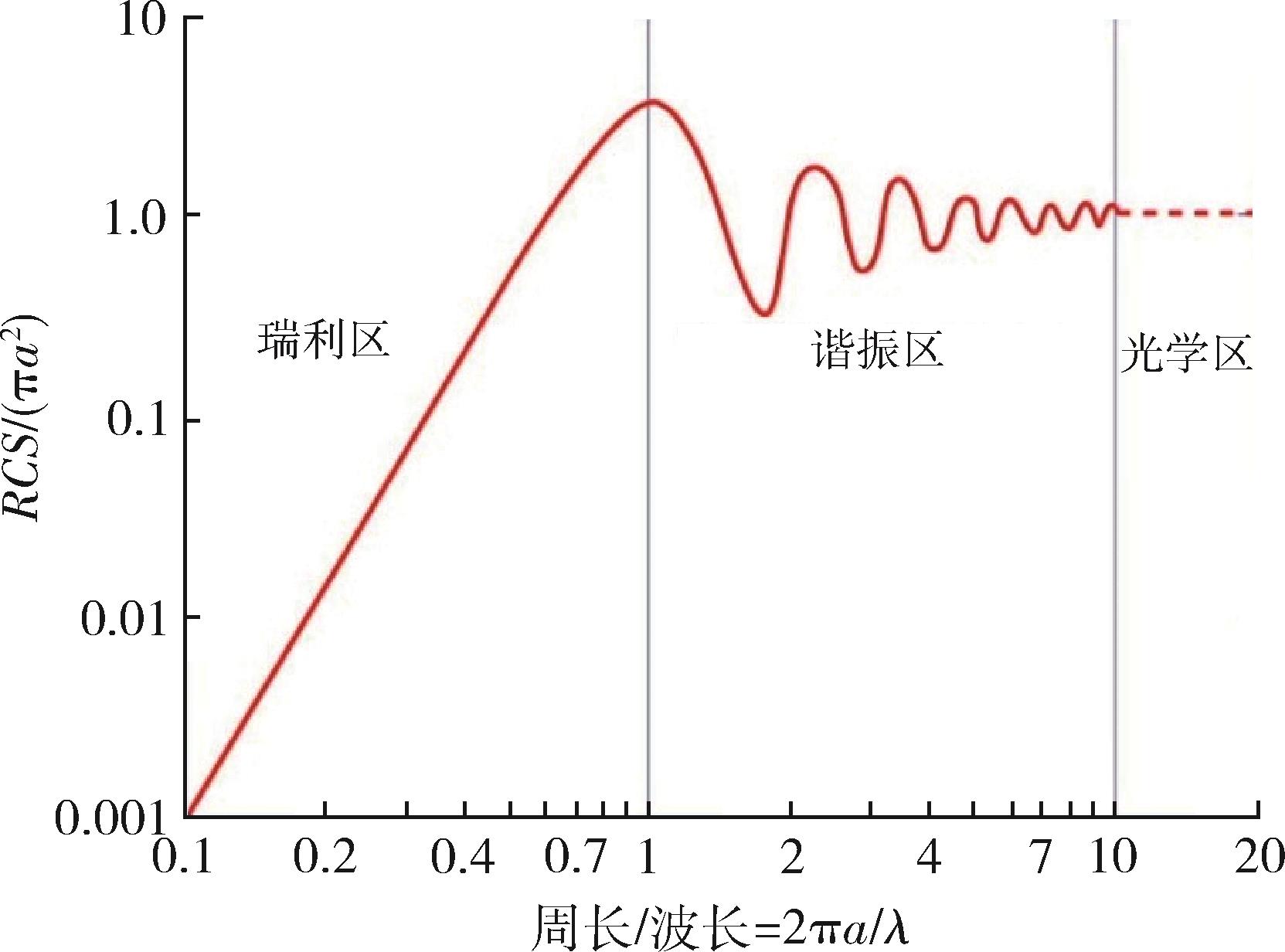
图1 反射面半径、雷达波长与RCS关系图
Fig. 1 Relationship of reflector radius and radar wavelength with RCS
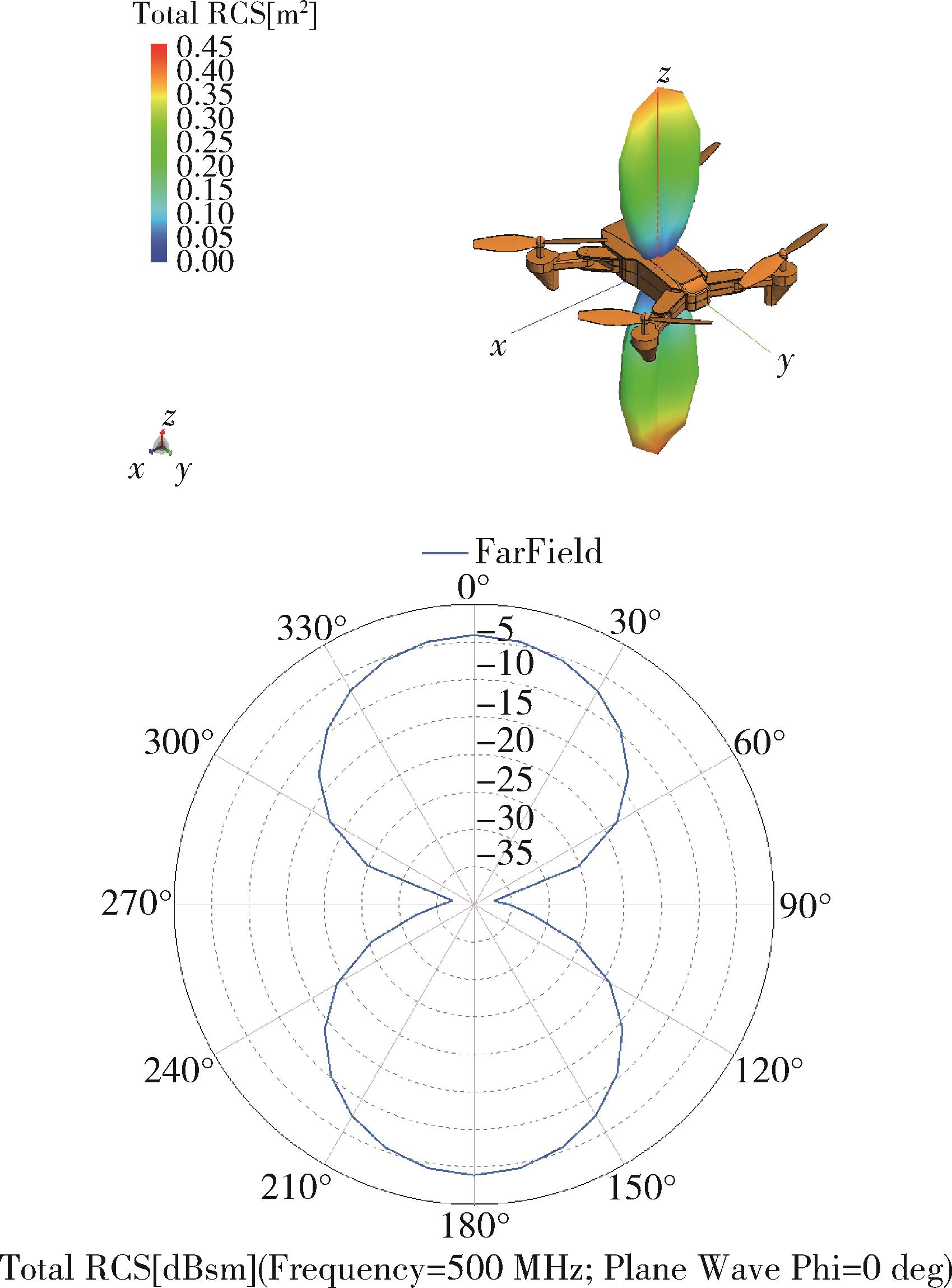
图2 500 MHz频率下的无人机RCS仿真结果
Fig. 2 RCS simulation results of UAVs at 500 MHz
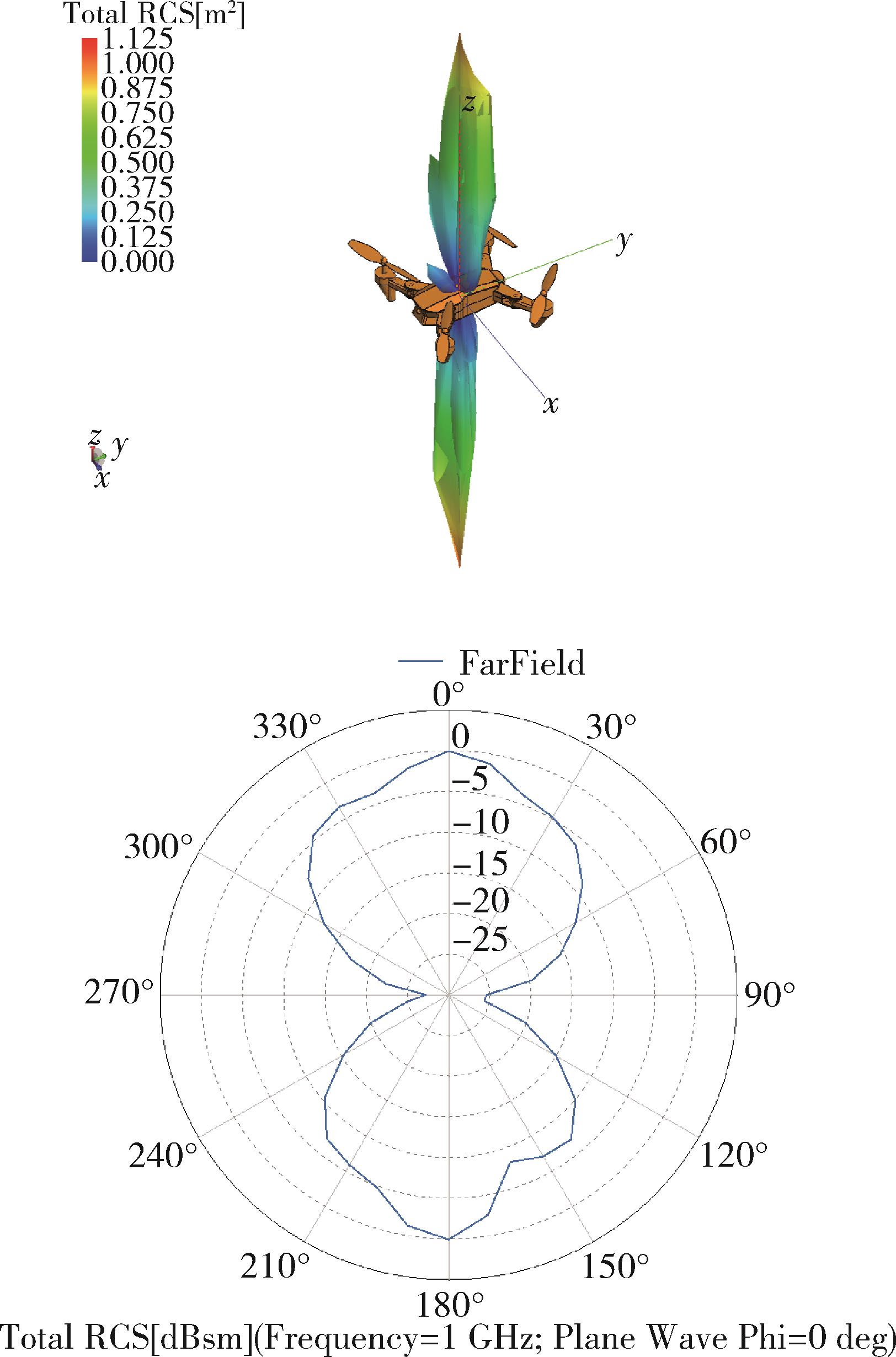
图3 1 GHz频率下的无人机RCS仿真结果
Fig. 3 Simulation results of UAV RCS at 1 GHz
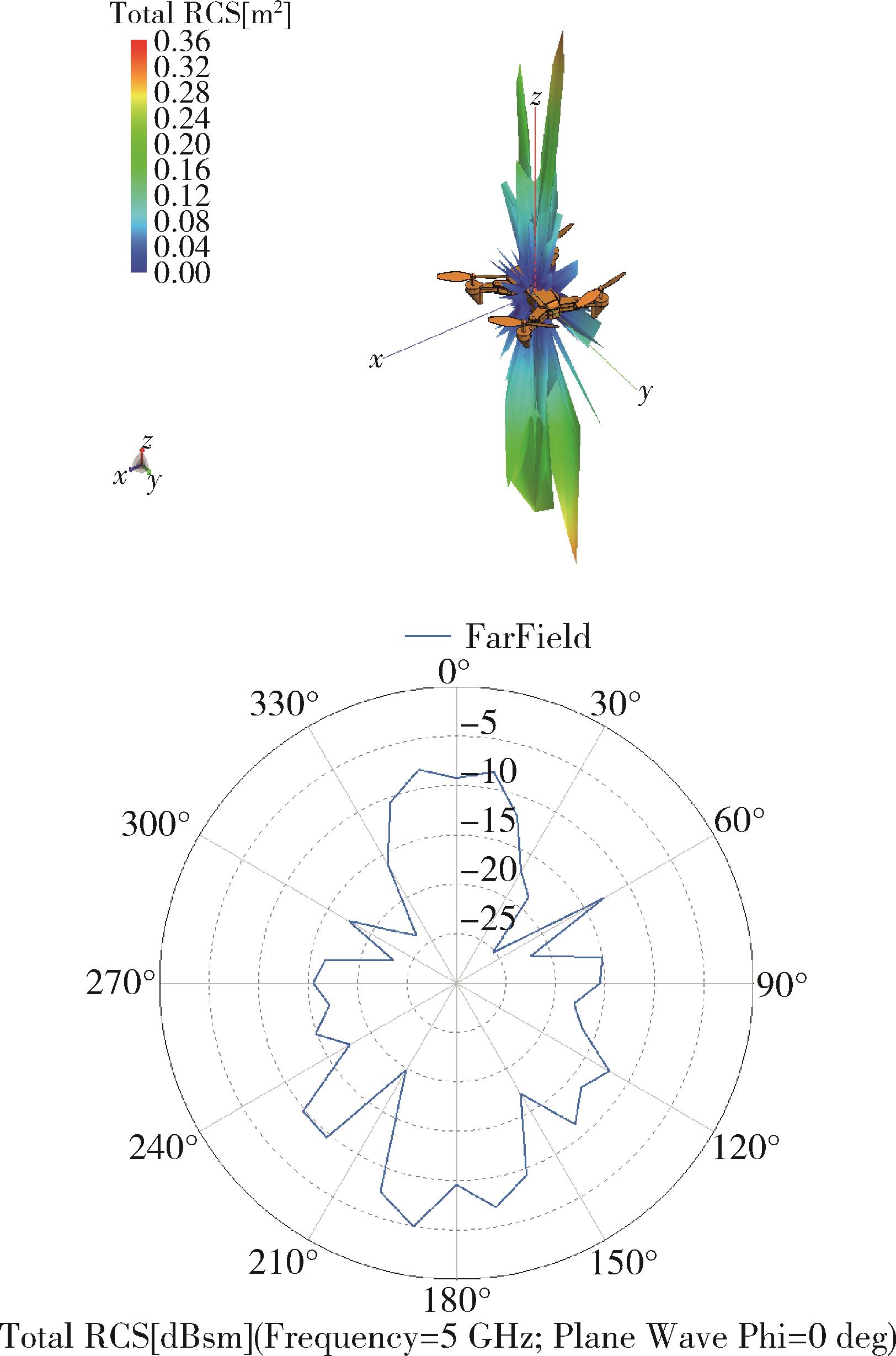
图4 5 GHz频率下的无人机RCS仿真结果
Fig. 4 Simulation results of UAV RCS at 5 GHz
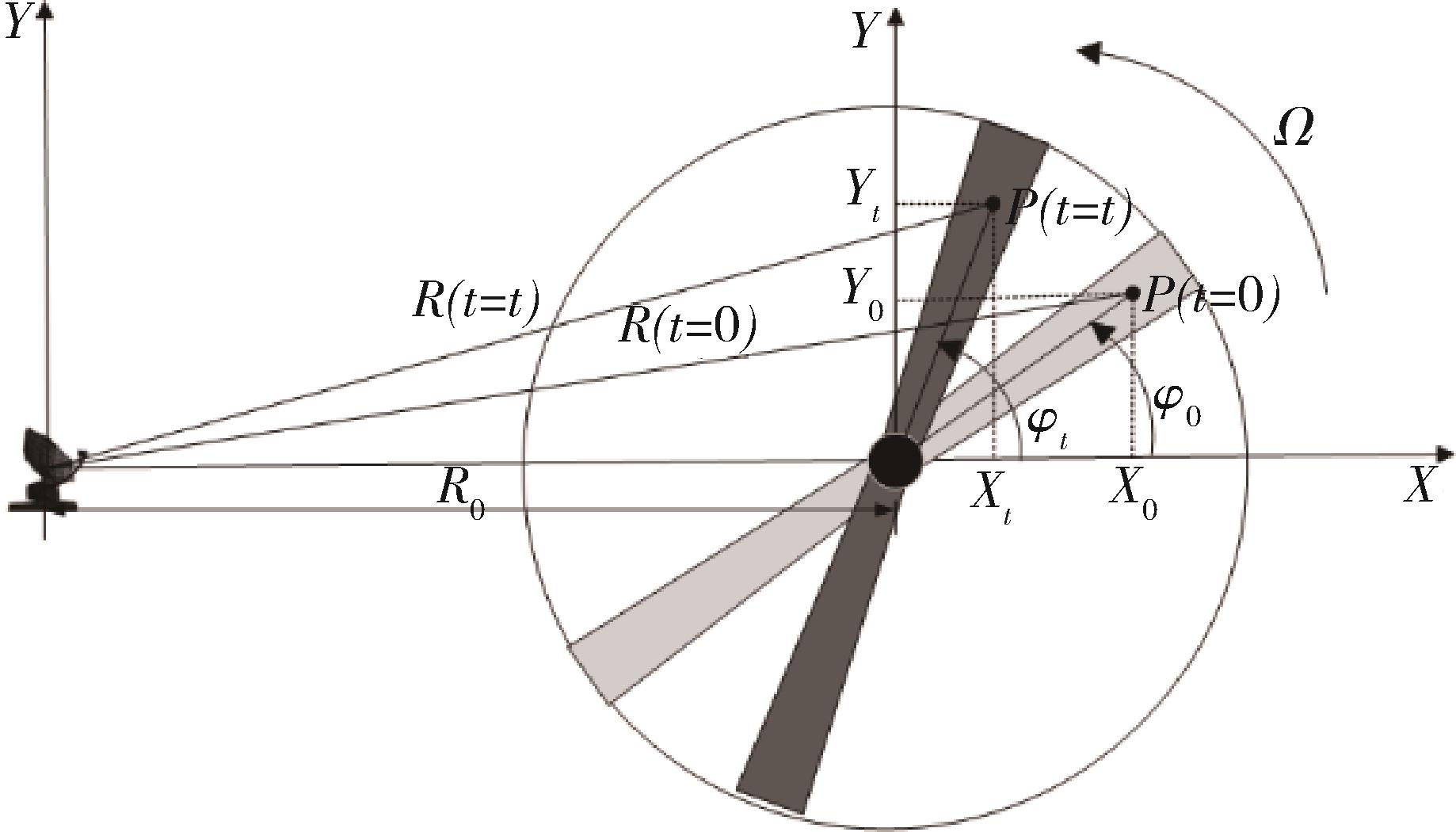
图5 雷达和旋转旋翼叶片的几何关系
Fig. 5 Geometric relationship between radar and rotating rotor blade
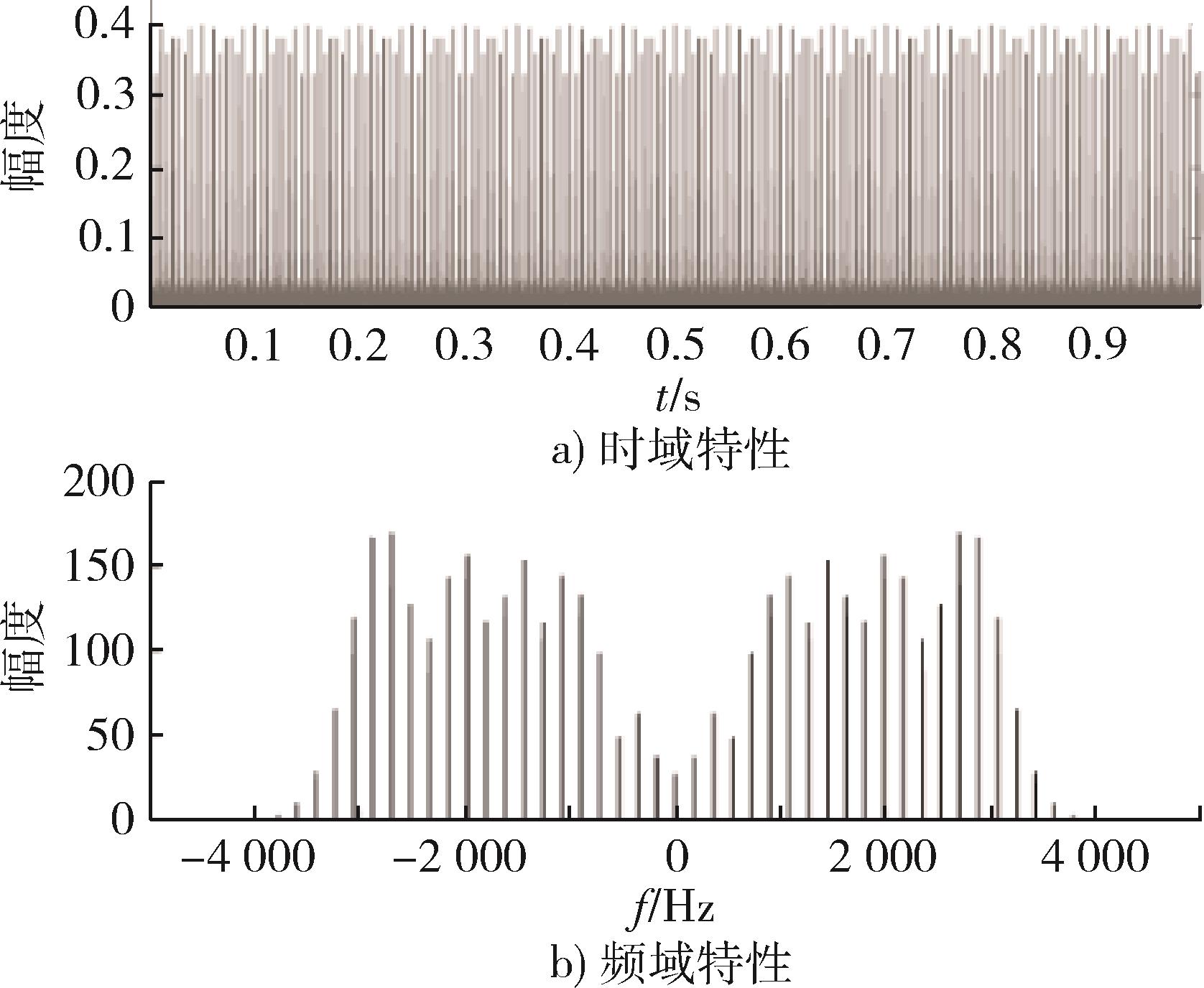
图6 桨叶回波信号图
Fig. 6 Echo signal of blade
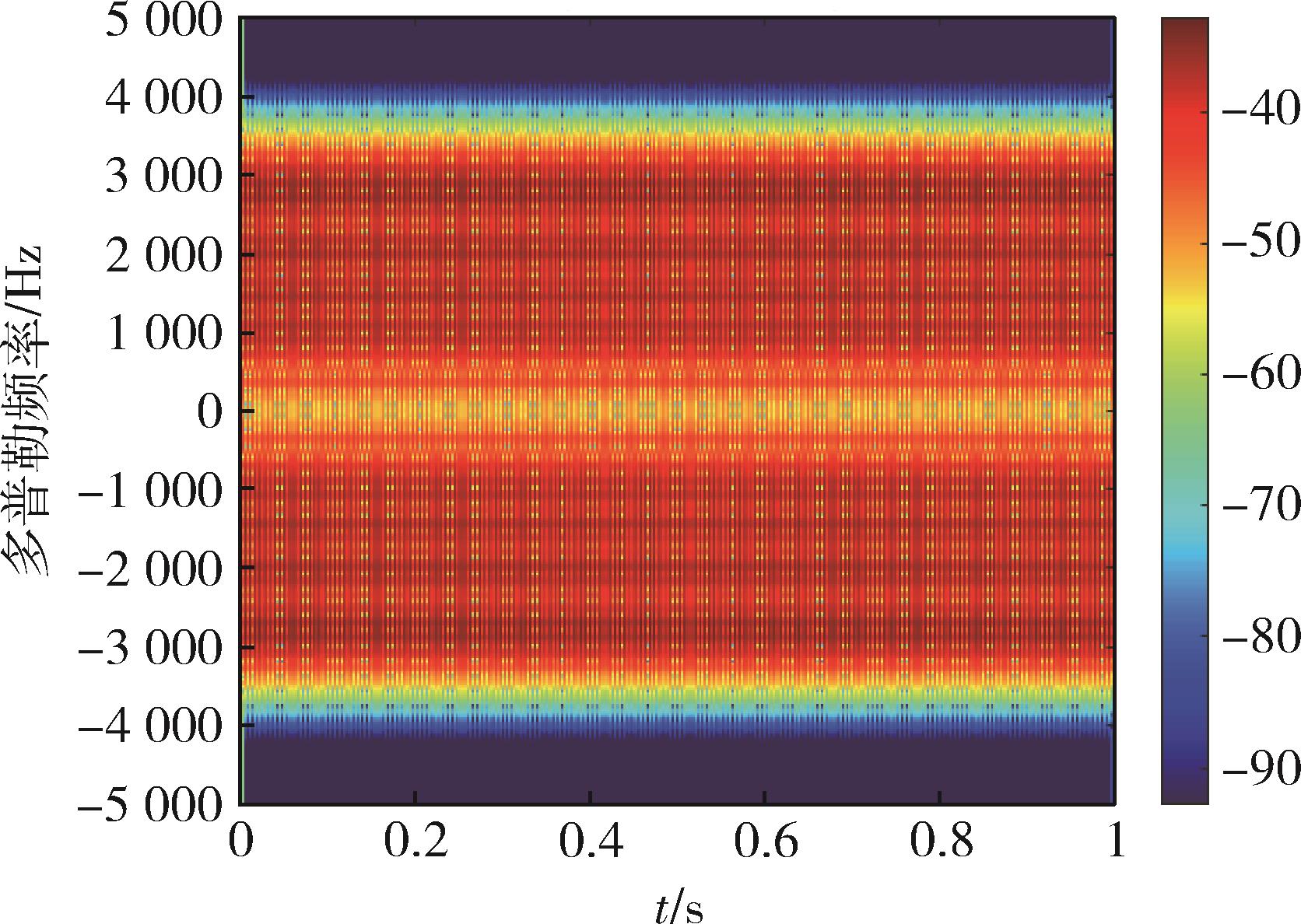
图7 桨叶回波时频图
Fig. 7 Time-frequency diagram of blade echo
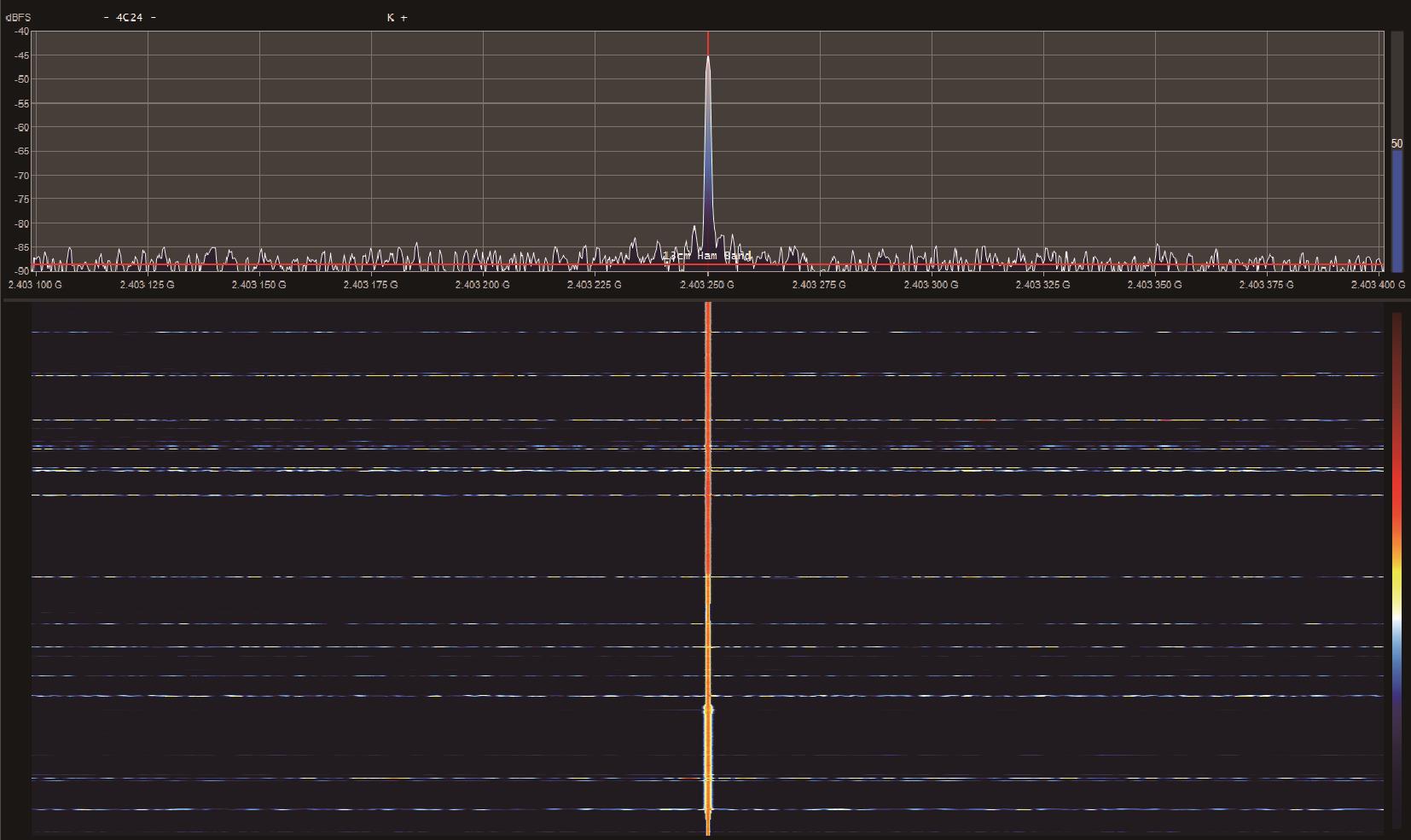
图8 大疆御3遥控信号
Fig. 8 Remote control signal of DJI Mavic3
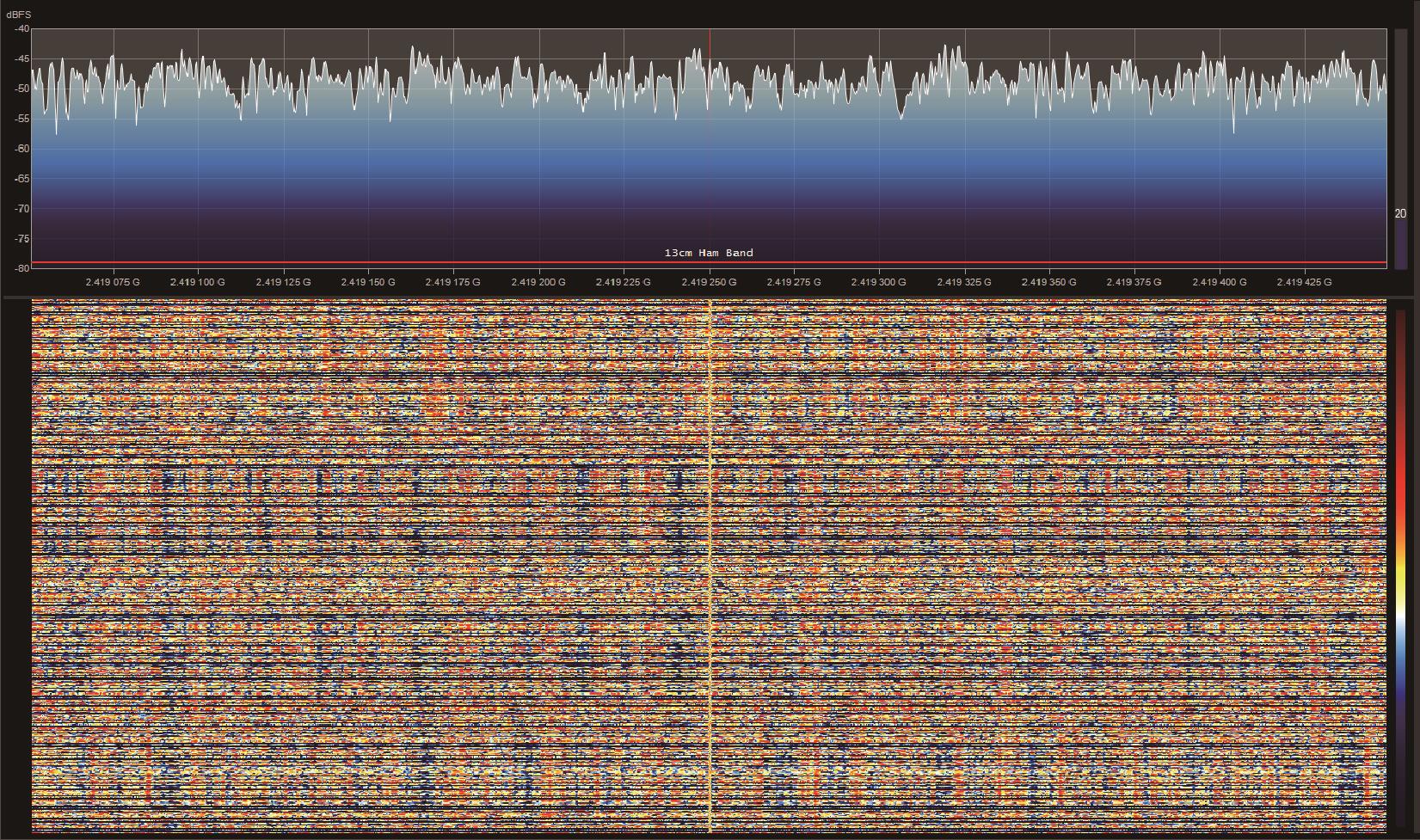
图9 大疆御3图传信号
Fig. 9 Video transmission signal of DJI Mavic3
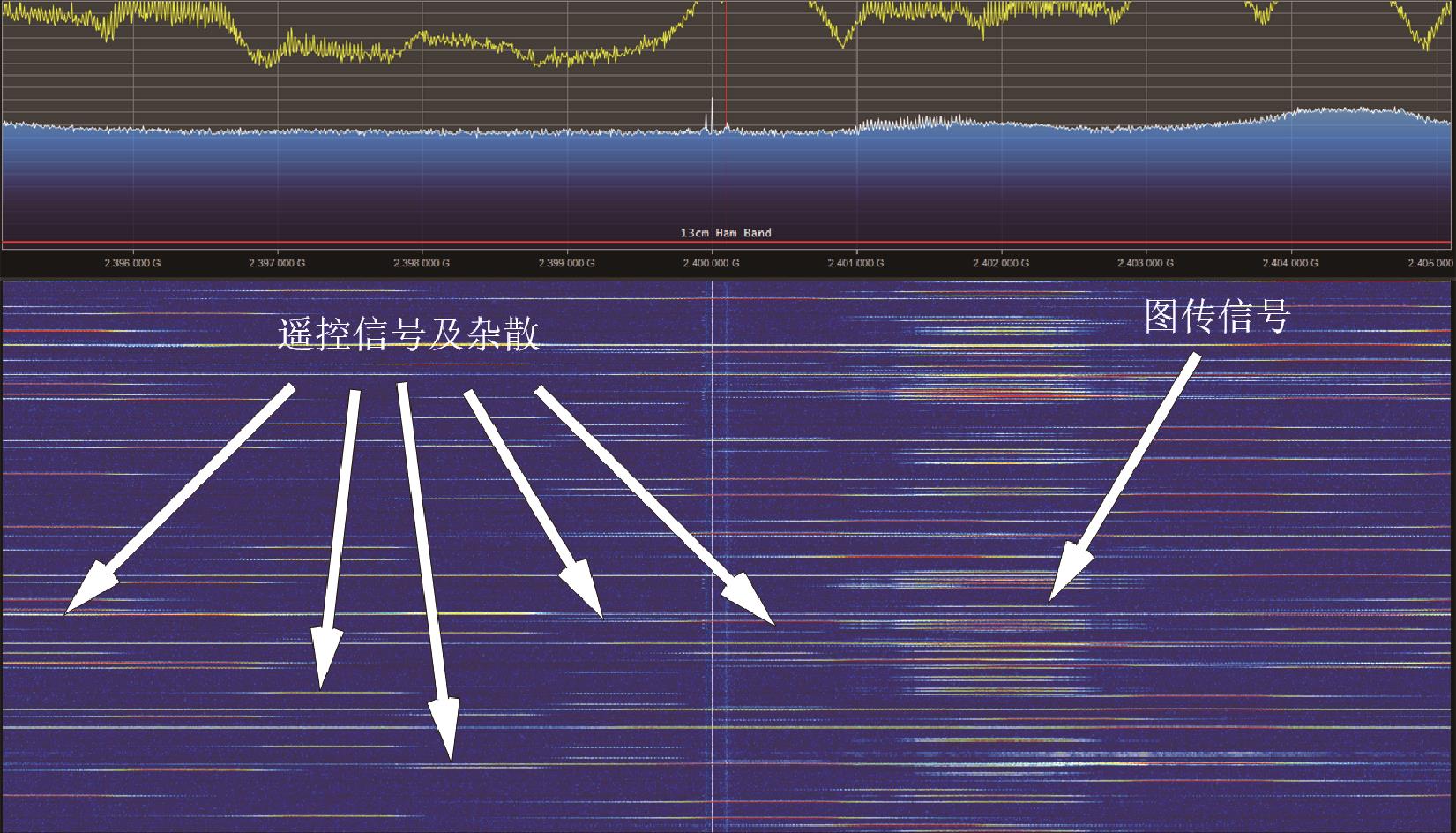
图10 组装FPV无人机遥控和图传信号
Fig. 10 Remote control signal and video transmission signal of FPV
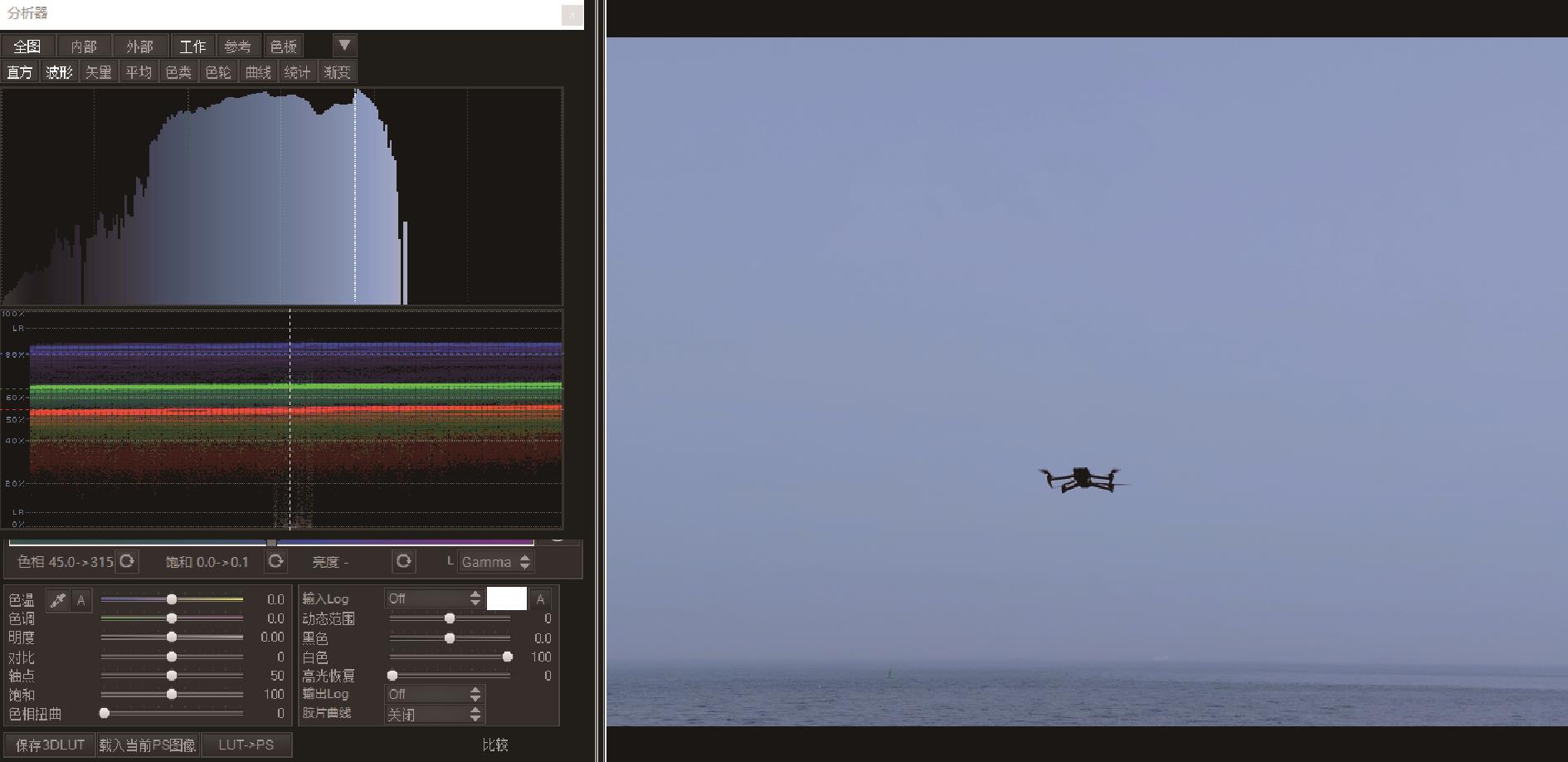
图11 大疆御3海洋背景近距颜色直方图
Fig. 11 Close-range color histogram of DJI Mavic3 ocean background
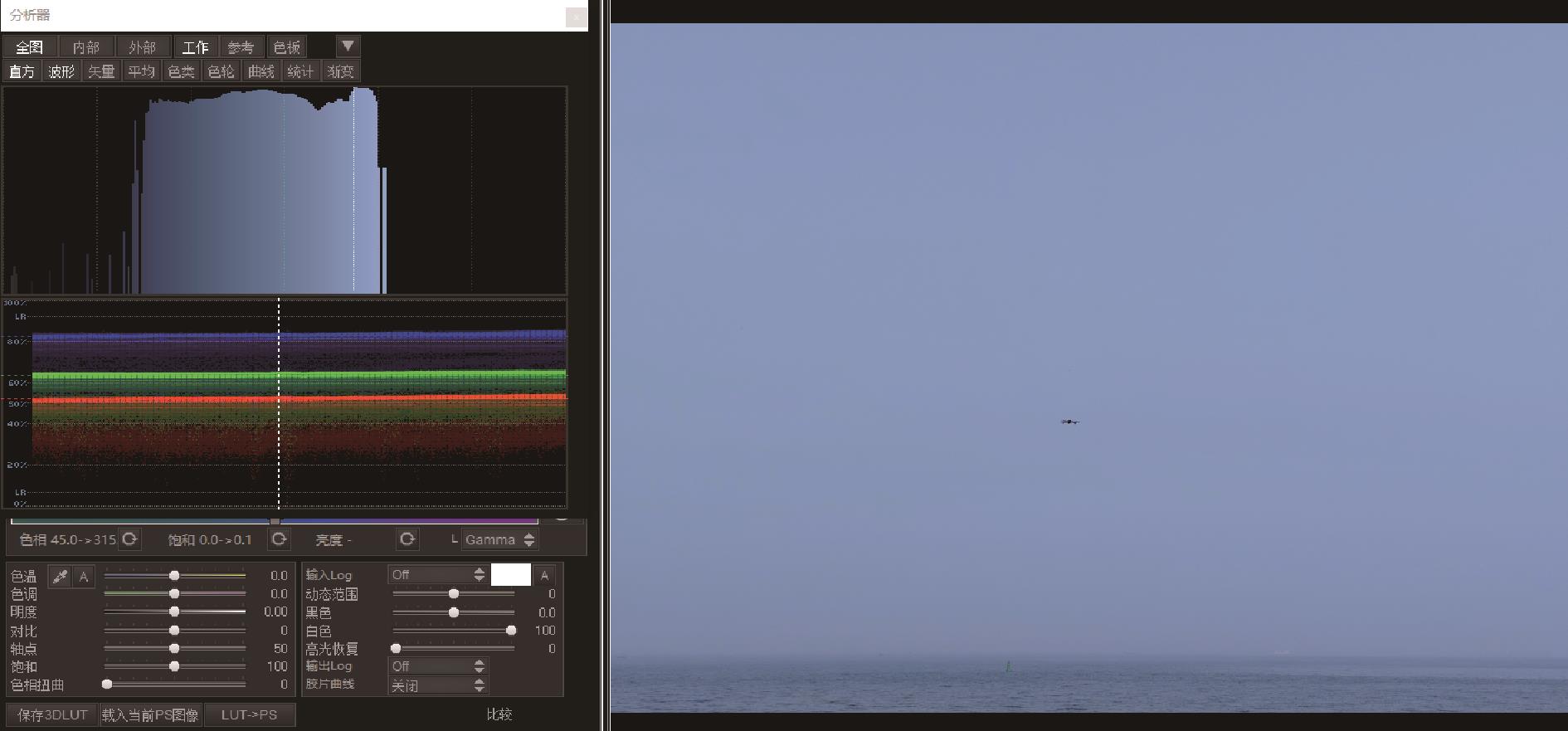
图12 大疆御3海洋背景远距颜色直方图
Fig. 12 Long-range color histogram of DJI Mavic3 ocean background
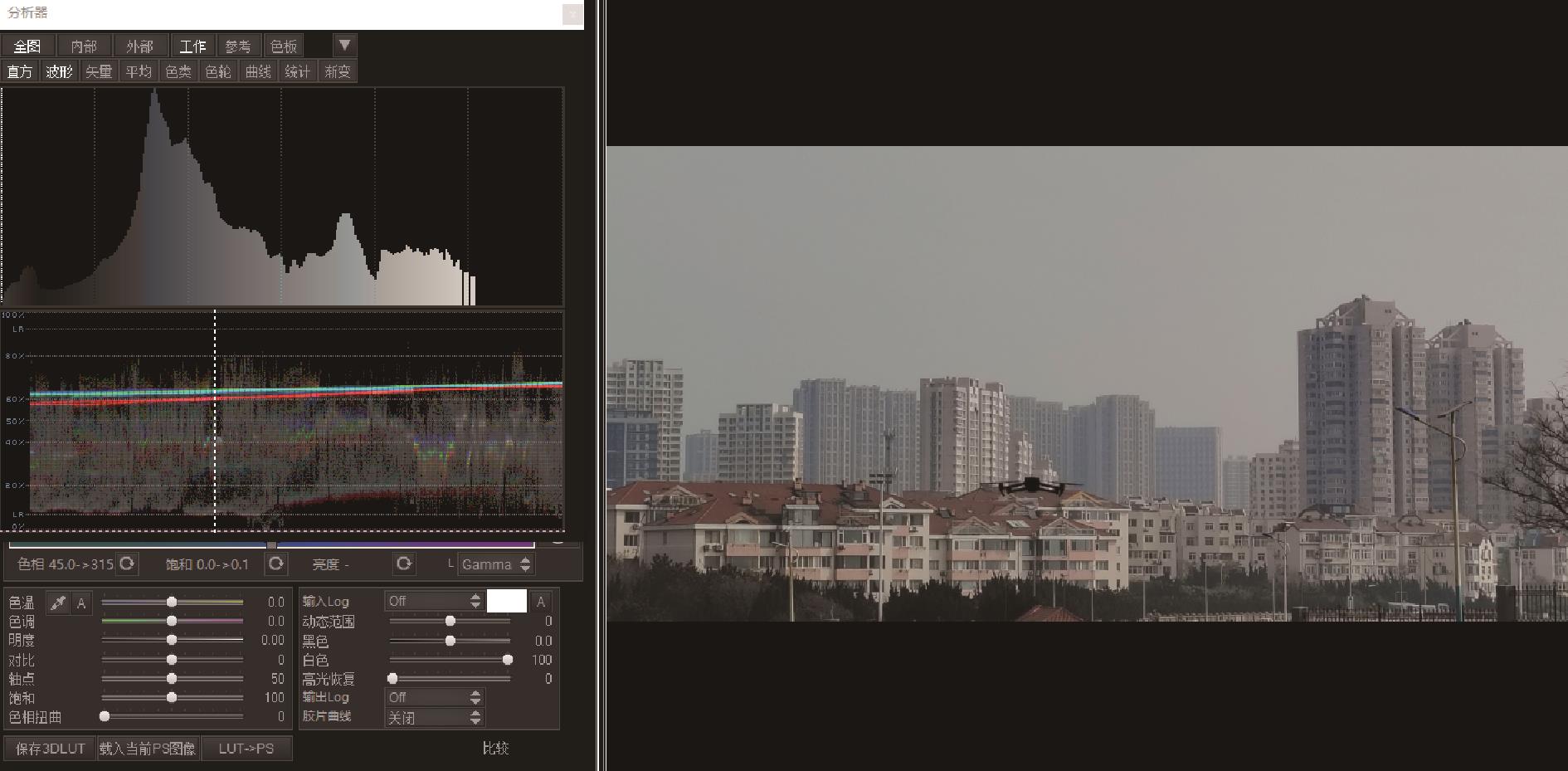
图13 大疆御3城市背景近距颜色直方图
Fig. 13 Close-range color histogram of DJI Mavic3 city background
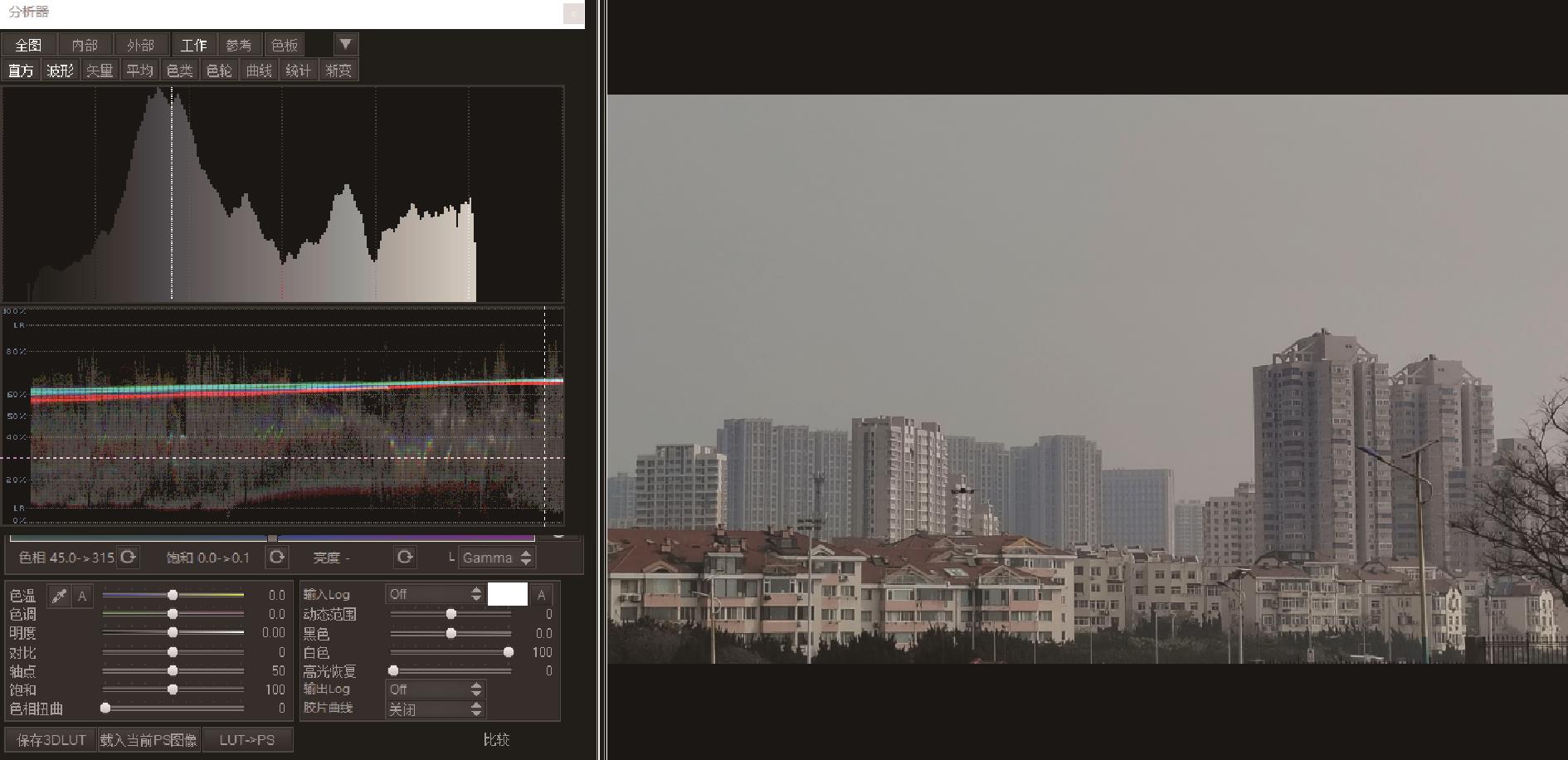
图14 大疆御3城市背景远距颜色直方图
Fig. 14 Long-range color histogram of DJI Mavic3 city background
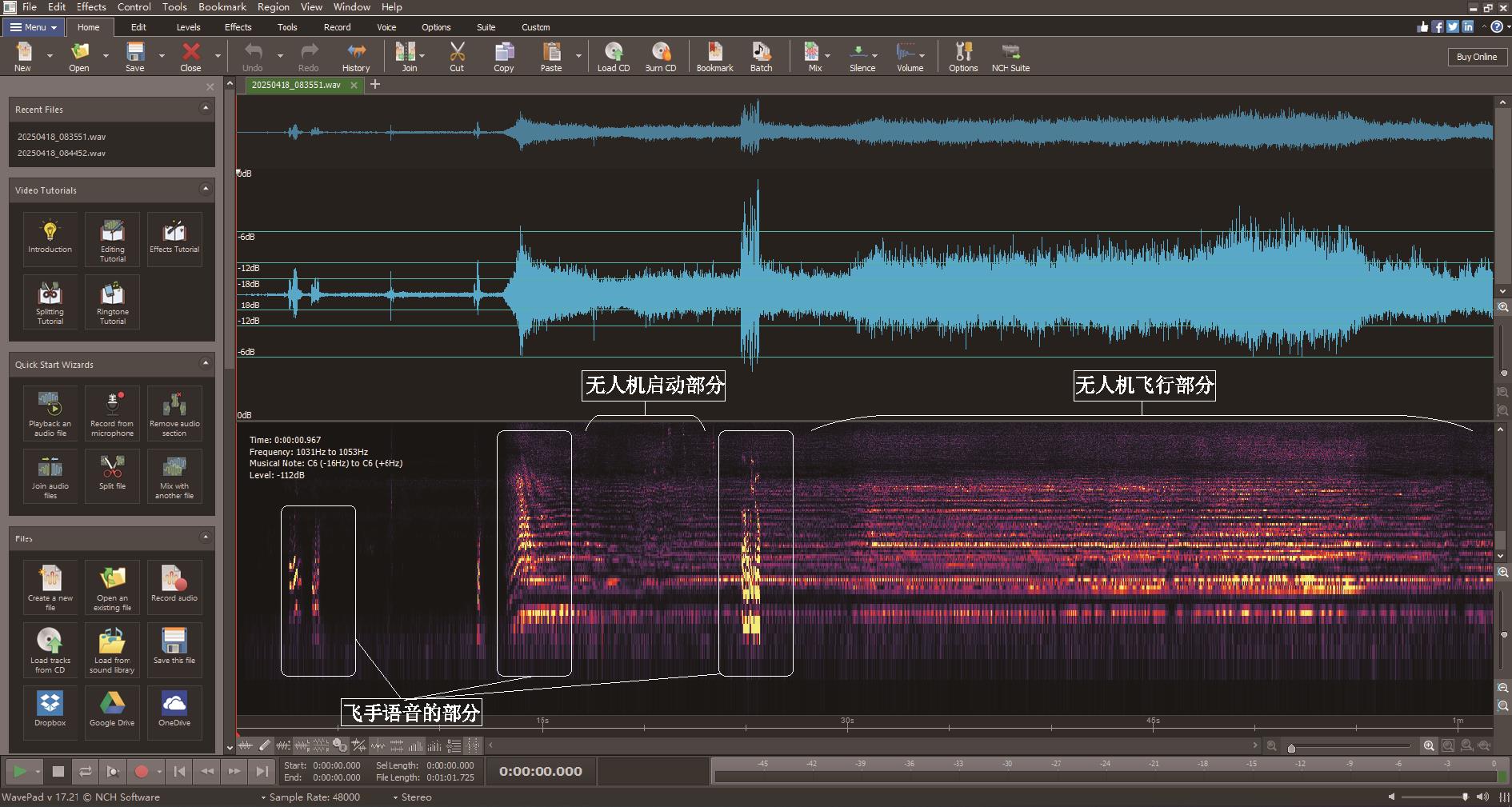
图15 大疆御3飞行的时频图
Fig. 15 Time-frequency diagram of DJI Mavic3 flying
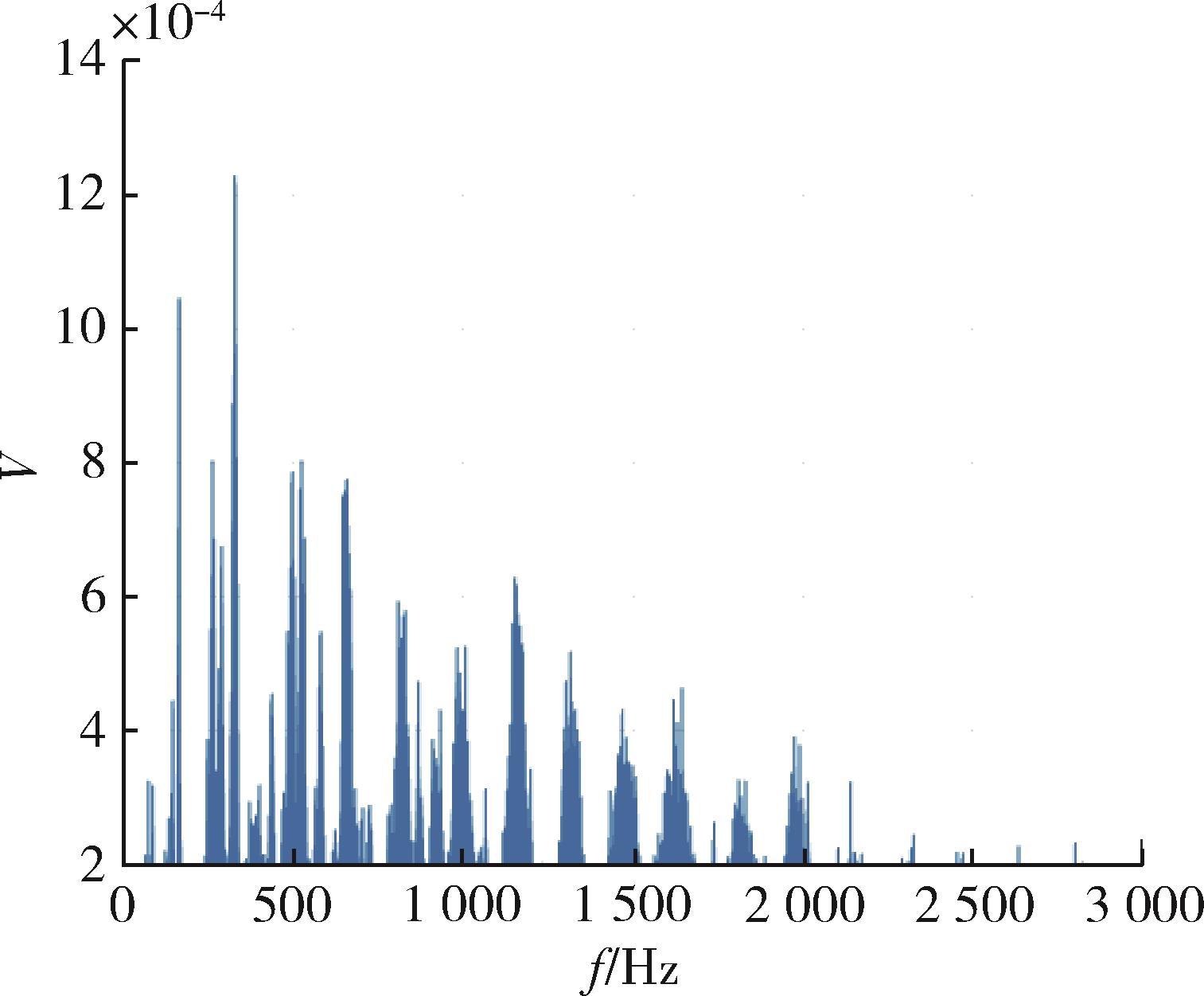
图16 大疆御3飞行的频谱图
Fig. 16 Frequency spectra of DJI Mavic 3 flying
检测 方式 | 检测 距离 | 优势 | 缺陷 |
|---|---|---|---|
| 视频 | <2 km | 显示直观;功耗低 | 易受气象条件影响;作用距离近 |
| 音频 | <200 m | 不辐射电磁信号,抗干扰性能好 | 易受噪声干扰;作用距离近;无法形成制导信息 |
| 雷达 | <10 km | 作用距离远;精度高;不受天气影响 | 成本高;易暴露位置;全时开机功耗高 |
| 射频 | <1.5 km | 准确率高;不辐射信号,功耗低;抗干扰性能好 | 频率覆盖难度大;提供信息维度低 |
表1 4种检测方式对比
Table 1 Comparison of four detection methods
检测 方式 | 检测 距离 | 优势 | 缺陷 |
|---|---|---|---|
| 视频 | <2 km | 显示直观;功耗低 | 易受气象条件影响;作用距离近 |
| 音频 | <200 m | 不辐射电磁信号,抗干扰性能好 | 易受噪声干扰;作用距离近;无法形成制导信息 |
| 雷达 | <10 km | 作用距离远;精度高;不受天气影响 | 成本高;易暴露位置;全时开机功耗高 |
| 射频 | <1.5 km | 准确率高;不辐射信号,功耗低;抗干扰性能好 | 频率覆盖难度大;提供信息维度低 |
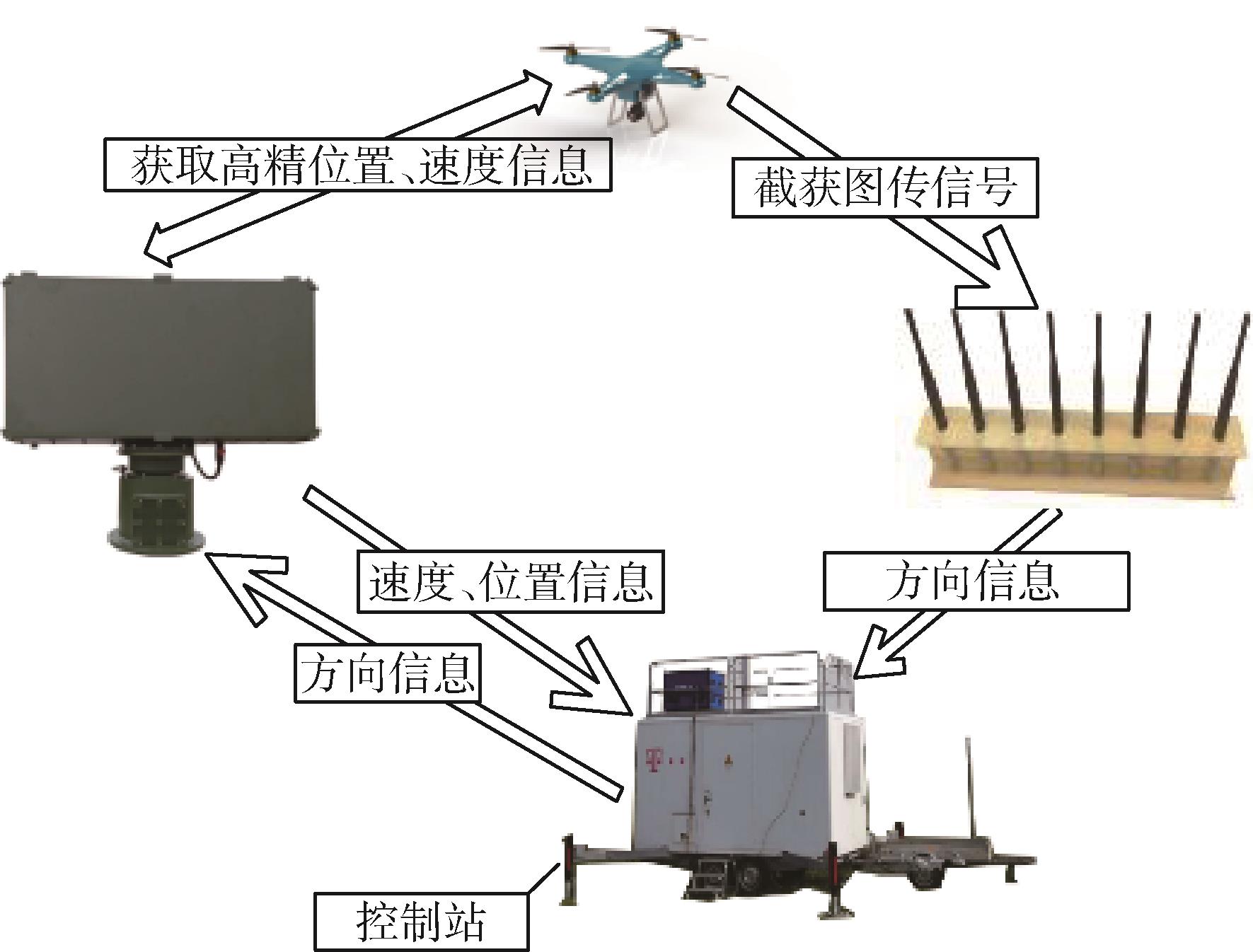
图17 检测系统工作流程图
Fig. 17 Work flow chart of the detection system
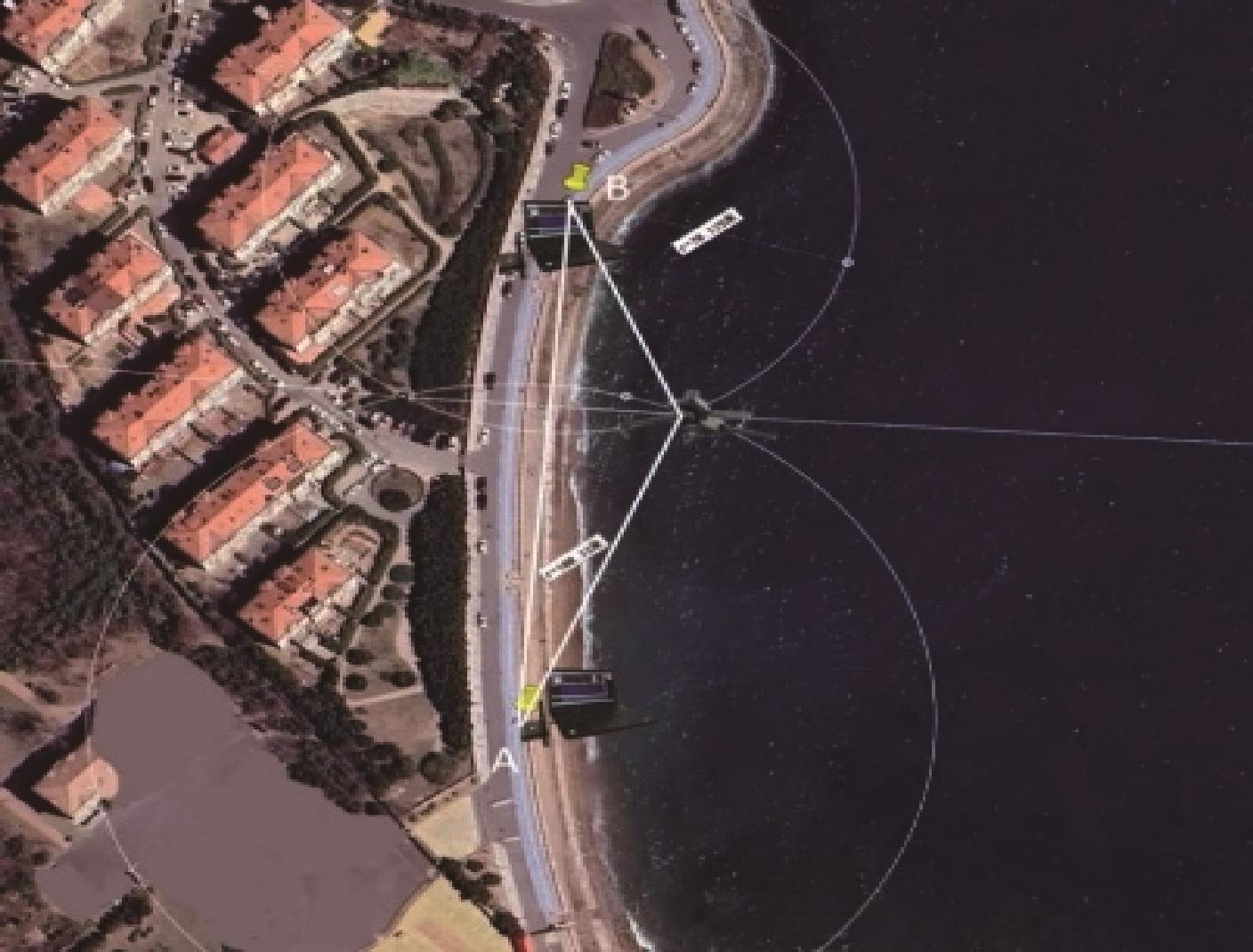
图18 双站测向原理图
Fig. 18 Principle of bistatic direction finding
| [1] | SAMUS M. Russia’s War in Ukraine: Drone-Centric Warfare[EB/OL]. (2025-01-15) [2025-04-12]. . |
| [2] | ESCAMILLA C G. Mission-Based UAV Swarms: Base Defense[D]. Monterey: Naval Postgraduate School, 2020. |
| [3] | CALCARA A, GILLI A, GILLI M, et al. Will the Drone Always Get Through? Offensive Myths and Defensive Realities[J]. Security Studies, 2022, 31(5): 791-825. |
| [4] | 叶巨翼, 谈何易. 美军反无人机作战现状研究[J]. 中国电子科学研究院学报, 2023, 18(5): 482-487. |
| YE Juyi, TAN Heyi. Situation Study on US Anti-UAV Operation[J]. Journal of China Academy of Electronics and Information Technology, 2023, 18(5): 482-487. | |
| [5] | 汪禹喆, 毕凯, 李龙跃. 地空导弹应对无人机“穿透”入侵的拦截能力分析[J]. 装甲兵学报, 2022(3): 66-71. |
| WANG Yuzhe, BI Kai, LI Longyue. Analysis of the Ability of Surface-to-Air Defense System to Intercept the Penetrating UAV[J]. Journal of Armored Forces, 2022(3): 66-71. | |
| [6] | 张君彪, 吴静, 赵飞, 等. 俄乌冲突中无人机作战运用情况及启示[J]. 现代防御技术, 2025, 53(6): 37-45. |
| ZHANG Junbiao, WU Jing, ZHAO Fei, et al. Application and Enlightenment of UAV in the Russia-Ukraine Conflict[J]. Modern Defence Technology, 2025, 53(6): 37-45. | |
| [7] | 沈利荣, 李守兵, 孙海峰, 等. 基于Starlink机会信号/INS的组合导航方法[J]. 导航定位与授时, 2024, 11(2): 72-82. |
| SHEN Lirong, LI Shoubing, SUN Haifeng, et al. Integrated Navigation Method Based on Starlink Opportunity Signal/INS[J]. Navigation Positioning and Timing, 2024, 11(2): 72-82. | |
| [8] | 吕强, 刘海军, 钟珲, 等. 一种主被动雷达目标跟踪测量数据融合方法[J]. 现代防御技术, 2024, 52(4): 108-116. |
| Qiang LÜ, LIU Haijun, ZHONG Hui, et al. A Fusion Method for Target Tracking Measurement Data of Active and Passive Radar[J]. Modern Defence Technology, 2024, 52(4): 108-116. | |
| [9] | Institute for Defense and Government Advancement. The U.S Counter-Unmanned Aerial Systems Market Report 2024-2029[M]. Arlington: Institute for Defense and Government Advancement, 2025. |
| [10] | BUDGE M C Jr, GERMAN S R. Basic Radar Analysis[M]. Boston/London: Artech House, 2020. |
| [11] | 付鑫, 赵然, 梁延峰, 等. 反无人机蜂群技术发展综述[J]. 中国电子科学研究院学报, 2022, 17(5): 421-428. |
| FU Xin, ZHAO Ran, LIANG Yanfeng, et al. Review on the Development of Anti UAV Bee Colony Technology[J]. Journal of China Academy of Electronics and Information Technology, 2022, 17(5): 421-428. | |
| [12] | GUITTON M J. Fighting the Locusts: Implementing Military Countermeasures Against Drones and Drone Swarm[J]. Scandinavian Journal of Military Studies, 2021, 4(1): 26-28. |
| [13] | 张旭, 陈明珣, 李晶晶. 反无人机蜂群作战的预警探测难点分析及对策措施[J]. 舰船电子工程, 2023, 43(5): 26-30. |
| ZHANG Xu, CHEN Mingxun, LI Jingjing. Analysis and Countermeasures of Early Warning Detection Difficulties in Anti UAV Swarm Warfare[J]. Ship Electronic Engineering, 2023, 43(5): 26-30. | |
| [14] | 北京蓝德信息科技有限公司. “星链”支撑下的无人系统作战[EB/OL]. (2025-04-02) [2025-04-20]. . |
| Beijing Lande Information Technology Co., Ltd. Unmanned System Operation Under the Support of "Starlink"[EB/OL]. (2025-04-02) [2025-04-20]. . | |
| [15] | CHEN V C. 雷达中的微多普勒效应[M]. 吴顺君, 杜兰, 刘宏伟, 译. Beijing: Publishing House of Electronics Industry, 2013 |
| CHEN V C. The Micro-Doppler Effect in Radar[M]. Translated by WU Shunjun, DU Lan, LIU Hongwei. Beijing: Publishing House of Electronics Industry, 2013. | |
| [16] | 陈小龙, 陈唯实, 饶云华, 等. 飞鸟与无人机目标雷达探测与识别技术进展与展望[J]. 雷达学报, 2020, 9(5): 803-827. |
| CHEN Xiaolong, CHEN Weishi, RAO Yunhua, et al. Progress and Prospects of Radar Target Detection and Recognition Technology for Flying Birds and Unmanned Aerial Vehicles[J]. Journal of Radars, 2020, 9(5): 803-827. | |
| [17] | 李德仁, 龚江昆, 闫军, 等. 基于雷达自动目标识别技术的反无人机雷达[J]. 无线电工程, 2024, 54(4): 765-779. |
| LI Deren, GONG Jiangkun, YAN Jun, et al. Counter-Drone Radar Based on Radar Automatic Target Recognition Technology[J]. Radio Engineering, 2024, 54(4): 765-779. | |
| [18] | 王圆亮. 基于射频阵列的多目标无人机识别系统[D]. 杭州: 浙江大学, 2023. |
| WANG Yuanliang. RF Array-Based Multi-target UAV Identification System[D]. Hangzhou: Zhejiang University, 2023. | |
| [19] | 田帅, 李盛, 王露曼, 等. 基于超分辨率重建的反无人机检测方法研究[J]. 无线互联科技, 2024, 21(8): 103-105. |
| TIAN Shuai, LI Sheng, WANG Luman, et al. Research on anti Drone Detection Method Based on Super Resolution Reconstruction[J]. Wireless Internet Science and Technology, 2024, 21(8): 103-105. | |
| [20] | 张骢, 韩自强, 岳明凯, 等. 反“低慢小”无人机红外检测方法研究[J]. 兵器装备工程学报, 2023, 44(7): 203-208. |
| ZHANG Cong, HAN Ziqiang, YUE Mingkai, et al. Research on the Infrared Detection Method of Anti-“Low-Slow-Small” UAVs[J]. Journal of Ordnance Equipment Engineering, 2023, 44(7): 203-208. | |
| [21] | 蒋罗婷. 当代反无人机系统技术综述[J]. 电子质量, 2023(2): 96-100. |
| JIANG Luoting. Review of Modern Counter Drone Systems Technology[J]. Electronics Quality, 2023(2): 96-100. | |
| [22] | 路彬彬. 一种新的反无人机雷达探测体制研究[J]. 现代雷达, 2022, 44(3): 24-28. |
| LU Binbin. A Study on Novel Radar Detection System of Anti-UAV[J]. Modern Radar, 2022, 44(3): 24-28. | |
| [23] | 邱小剑, 骆博雅, 付珍, 等. 国内外反无人机技术发展综述[J]. 战术导弹技术, 2024(5): 63-73, 98. |
| QIU Xiaojian, LUO Boya, FU Zhen, et al. An Overview on Development of Domestic and Foreign Anti-UAV Technology[J]. Tactical Missile Technology, 2024(5): 63-73, 98. | |
| [24] | Xingfang ONG. Conceptualization and Analysis of Using Unmaned Aerial Vehicles as Communications Relays in a GPS-Denied Environment[D]. Monterey: Naval Postgraduate School, 2022. |
| [25] | MILLER S W. C-UAS-Solving the Detection Problem[EB/OL]. (2021-09-29) [2025-04-20]. . |
| [26] | 林俤. 复杂背景下反无人机的智能光电搜索跟踪技术研究[D]. 北京: 中国科学院大学, 2020. |
| LIN Di. Research on Intelligent Photoelectric Search and Tracking Technology of Anti-UAV in Complex Background[D]. Beijing: University of Chinese Academy of Sciences, 2020. | |
| [27] | 杨辉跃, 简钰洪, 涂亚庆, 等. 反无人机视觉检测与跟踪技术进展分析[J]. 国防科技, 2023, 44(3): 40-51. |
| YANG Huiyue, JIAN Yuhong, TU Yaqing, et al. Review of Anti-UAV Visual Detection and Tracking Technologies[J]. National Defense Technology, 2023, 44(3): 40-51. | |
| [28] | 雷爽. 小型多旋翼无人机入侵检测与拦截系统研究[D]. 赣州: 江西理工大学, 2023. |
| LEI Shuang. Research on Small Multi-rotor UAV Intrusion Detection and Interception System[D]. Ganzhou: Jiangxi University of Science and Technology, 2023. | |
| [29] | 吴浩, 董凯, 徐婧, 等. 从俄乌冲突看反无人机系统未来发展趋势[C]∥第十二届中国指挥控制大会论文集. 北京: 中国指挥与控制学会, 2024: 226-231. |
| WU Hao, DONG Kai, XU Jing, et al. Future Development Trends of Anti-UAV in light of Russia-Ukraine Conflict[C]∥Proceedings of the 12th China Command and Control Conference. Beijing: Chinese Institute of Command and Control, 2024: 226-231. | |
| [30] | 梁日杰. 小型四轴无人机目标识别与跟踪技术研究[D]. 长春: 长春理工大学, 2022. |
| LIANG Rijie. Research on Target Recognition and Tracking Technology of Small Four Axis UAV[D]. Changchun: Changchun University of Science and Technology, 2022. | |
| [31] | 梁智博. 无人机目标跟踪和识别算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| LIANG Zhibo. Research on UAV Target Tracking and Recognition Algorithm[D]. Harbin: Harbin Institute of Technology, 2022. | |
| [32] | 潘廷伟. 面向无人机视觉的地面目标定位方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2024. |
| PAN Tingwei. Research on Ground Target Geolocation Methods for UAV Vision[D]. Harbin: Harbin Engineering University, 2024. | |
| [33] | 时晓曚, 孙柏堂, 刘雪映, 等. 青岛近海“20210427”海雾过程的观测与诊断分析[J]. 海洋湖沼通报, 2023, 45(3): 1-6. |
| SHI Xiaomeng, SUN Baitang, LIU Xueying, et al. Observation and Diagnostic Analysis of “20210427” Sea Fog Process in Qingdao Offshore[J]. Transactions of Oceanology and Limnology, 2023, 45(3): 1-6. | |
| [34] | 王倩, 时晓曚, 张苏平. 台风“利奇马”(1909)登陆青岛时黄海北部一次海雾过程的观测分析[J]. 海洋学报, 2024, 46(4): 34-46. |
| WANG Qian, SHI Xiaomeng, ZHANG Suping. Observational Analyses of a Sea Fog Event Over the Northern Yellow Sea When Typhoon “Lekima” (1909) Landed on Qingdao[J]. Hai Yang xue bao, 2024, 46(4): 34-46. | |
| [35] | ADAVANNE S, POLITIS A, NIKUNEN J, et al. Sound Event Localization and Detection of Overlapping Sources Using Convolutional Recurrent Neural Networks[J]. IEEE Journal of Selected Topics in Signal Processing, 2019, 13(1): 34-48. |
| [36] | 李川, 郝燕, 冯新星, 等. 城市低空无人机防御体系建设思考[J]. 现代防御技术, 2025, 53(6): 12-20. |
| LI Chuan, HAO Yan, FENG Xinxing, et al. Construction of UAV Defense System of Urban Low-Altitude Airspace[J]. Modern Defence Technology, 2025, 53(6): 12-20. |
| [1] | 吴云松, 曹伟, 潘继飞, 许金鑫, 张志强, 籍林峰. 有源无源数据协同的目标识别算法[J]. 现代防御技术, 2026, 54(1): 111-118. |
| [2] | 涂国勇, 陈适. 一种基于RCS序列的空间目标姿态估计方法[J]. 现代防御技术, 2025, 53(5): 145-151. |
| [3] | 陈凯诺, 张福光, 张涵, 尹延涛, 杜光传. 高阶图神经联合训练的装备剩余寿命预测[J]. 现代防御技术, 2025, 53(4): 148-159. |
| [4] | 尹建国, 盛文, 赵蒙, 江河. 一种HRRP重构识别方法:带标签约束的SDAE-CNN[J]. 现代防御技术, 2025, 53(3): 32-41. |
| [5] | 李家宽, 冯博, 申伦豪, 叶春茂, 余继周. 入射视线角引导雷达图像特征融合的气动目标识别方法[J]. 现代防御技术, 2025, 53(2): 129-140. |
| [6] | 付亦凡, 阮航, 周东平, 穆贺强. 基于改进轻量化神经网络的干扰识别方法[J]. 现代防御技术, 2025, 53(2): 91-98. |
| [7] | 于天立, 董文锋, 刘文俭, 范亚. 透波隐身机翼蒙皮设计参数优化方法仿真研究[J]. 现代防御技术, 2022, 50(2): 45-52. |
| [8] | 牛浩楠, 王文灿, 刘清波. 基于卷积神经网络的雷达辐射源识[J]. 现代防御技术, 2021, 49(3): 130-136. |
| [9] | 黄祥, 徐静, 都晨, 郭昭艺, 吴涛. 一种无人机辐射源调制样式识别算法[J]. 现代防御技术, 2021, 49(3): 98-104. |
| [10] | 马新星, 滕克难, 侯学隆. 空袭主攻方向的卷积神经网络判断模型[J]. 现代防御技术, 2018, 46(5): 6-12. |
| [11] | 许道明, 张宏伟. 雷达低慢小目标检测技术综述[J]. 现代防御技术, 2018, 46(1): 148-155. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
