

现代防御技术 ›› 2023, Vol. 51 ›› Issue (3): 107-119.DOI: 10.3969/j.issn.1009-086x.2023.03.013
• 目标特性与探测跟踪技术 • 上一篇
于勇政1( ), 邵学辉1,2, 高仕博2, 蒲治伟1, 薛冰1
), 邵学辉1,2, 高仕博2, 蒲治伟1, 薛冰1
收稿日期:2023-04-06
修回日期:2023-05-15
出版日期:2023-06-28
发布日期:2023-06-27
通讯作者:
于勇政
作者简介:于勇政(1999-),男,黑龙江鸡西人。硕士生,研究方向为多平台协同。
基金资助:
Yongzheng YU1(), Xuehui SHAO1,2, Shibo GAO2, Zhiwei PU1, Bing XUE1
Received:2023-04-06
Revised:2023-05-15
Online:2023-06-28
Published:2023-06-27
Contact:
Yongzheng YU
摘要:
为解决被动、主被动多平台协同跟踪场景下最优构型设计问题,提出基于效能评价体系的多平台协同跟踪最优构型设计方法。推导被动、主被动多平台协同跟踪数学模型,选取可评价跟踪结果优劣的效能作为跟踪效能,并设计量化函数使跟踪效能量纲统一;利用层次分析法构建跟踪效能评价体系,推导效能评价值计算公式,为求取最优构型参数,建立最大化效能评价值,考虑构型参数取值范围以及通信速率为约束的最优设计问题;采用差分演化算法求解最优设计问题;仿真结果表明所提方法能够获取最优构型参数,完成跟踪效能评价值最优的构型设计。
中图分类号:
于勇政, 邵学辉, 高仕博, 蒲治伟, 薛冰. 多平台协同跟踪最优构型设计[J]. 现代防御技术, 2023, 51(3): 107-119.
Yongzheng YU, Xuehui SHAO, Shibo GAO, Zhiwei PU, Bing XUE. Optimal Configuration Design for Multi-platform Collaborative Target Tracking[J]. Modern Defense Technology, 2023, 51(3): 107-119.
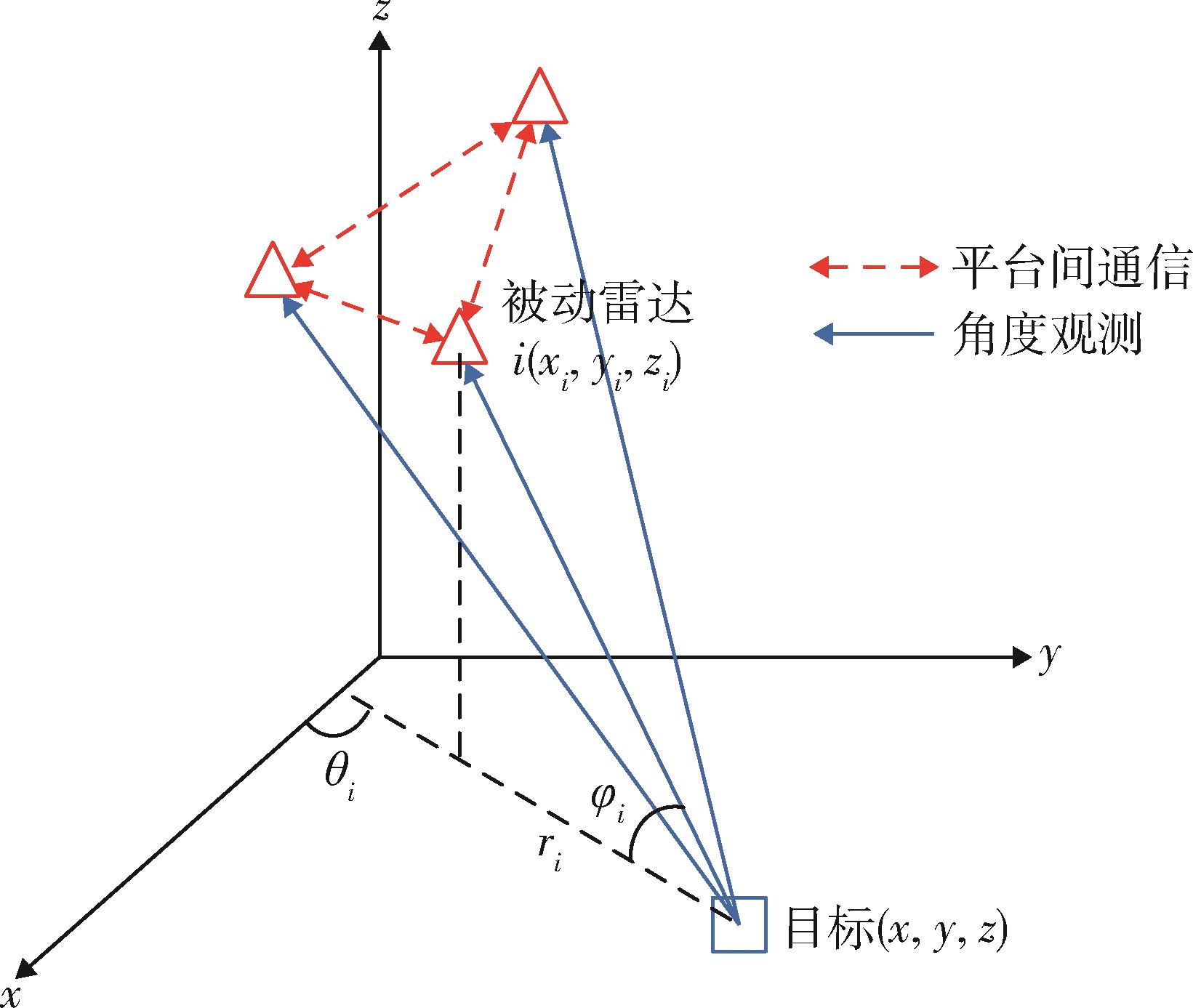
图1 被动多平台协同测角定位原理图
Fig. 1 Illustration of passive cooperative angle measurement and positioning
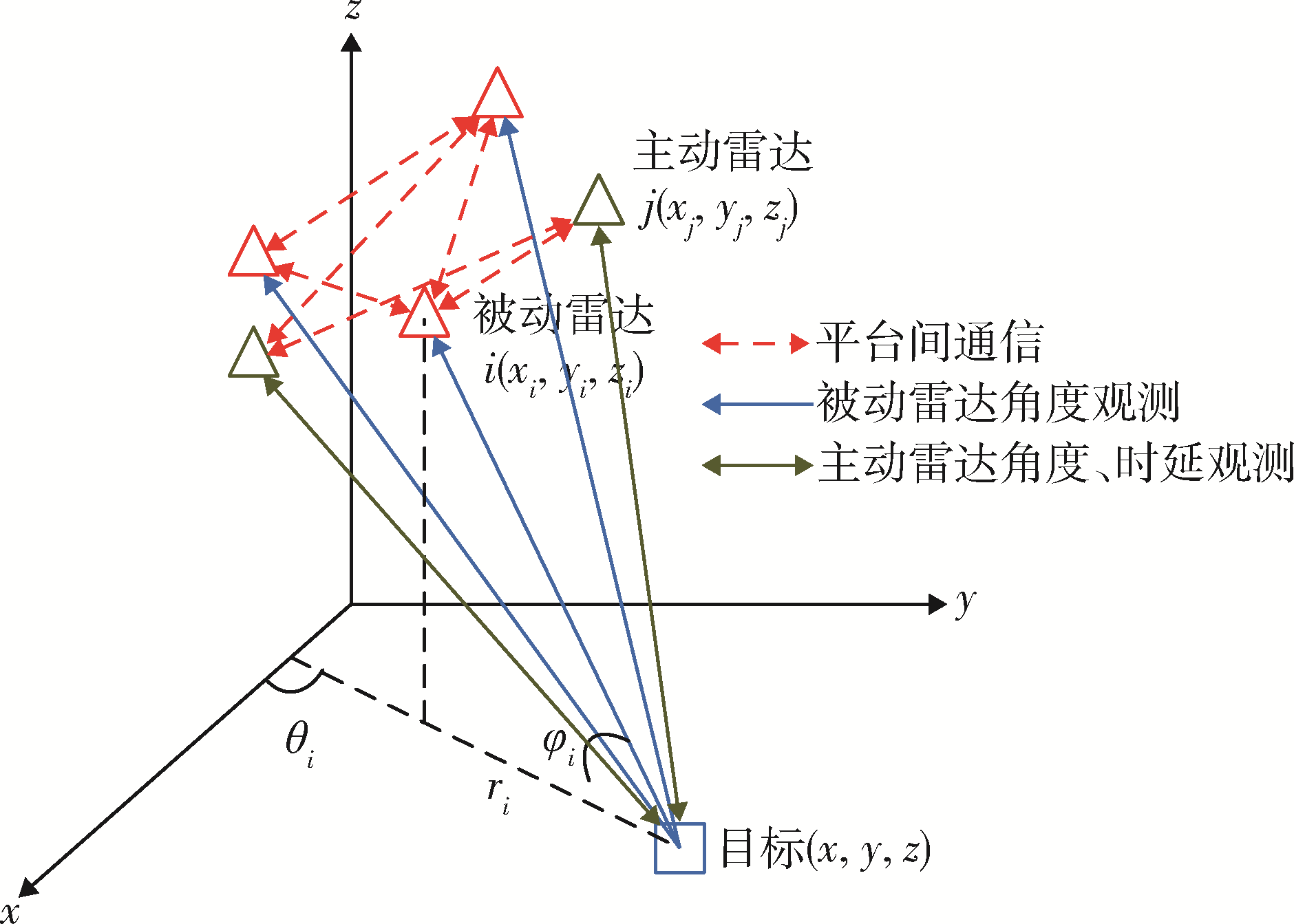
图2 被动测角、主动测角测时延协同定位原理图
Fig. 2 Illustration of cooperative positioning based on passive angle and active angle measurement with active time delay
| 效能 | 效能含义 |
|---|---|
| 成功跟踪概率 | 成功跟踪样本时间与总跟踪时间样本比值 |
| 最大跟踪稳定时间 | 最大成功跟踪持续时间 |
| 最大跟踪距离 | 第一次成功跟踪时平台与目标距离 |
| 最终x, y, z三向位置跟踪误差 | 滤波结束对目标三向位置估计误差 |
| 最终x, y, z三向速度跟踪误差 | 滤波结束对目标三向速度估计误差 |
表1 效能及其含义
Table 1 Effectiveness and its meaning
| 效能 | 效能含义 |
|---|---|
| 成功跟踪概率 | 成功跟踪样本时间与总跟踪时间样本比值 |
| 最大跟踪稳定时间 | 最大成功跟踪持续时间 |
| 最大跟踪距离 | 第一次成功跟踪时平台与目标距离 |
| 最终x, y, z三向位置跟踪误差 | 滤波结束对目标三向位置估计误差 |
| 最终x, y, z三向速度跟踪误差 | 滤波结束对目标三向速度估计误差 |
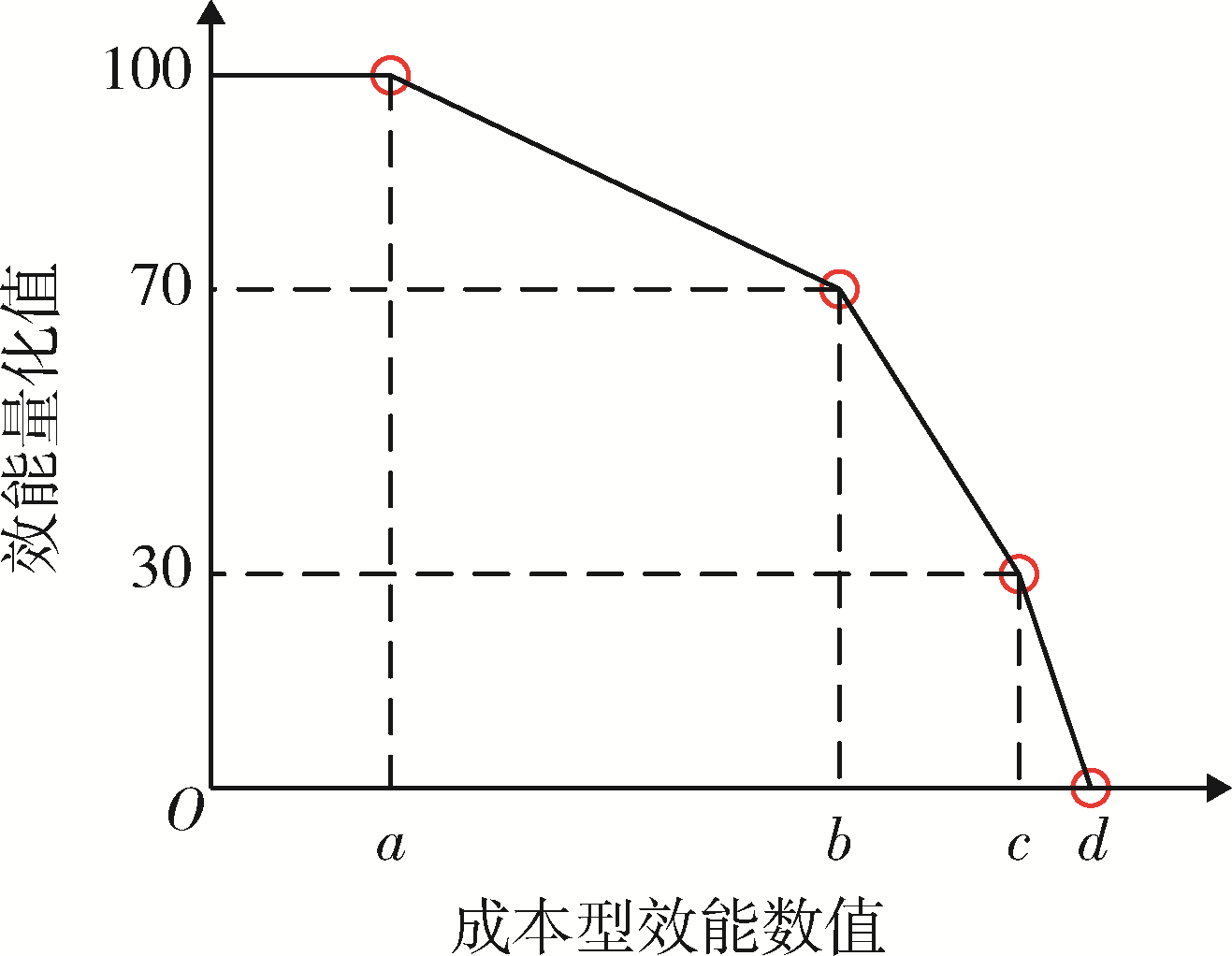
图3 递减折线函数
Fig. 3 Decreasing polyline function
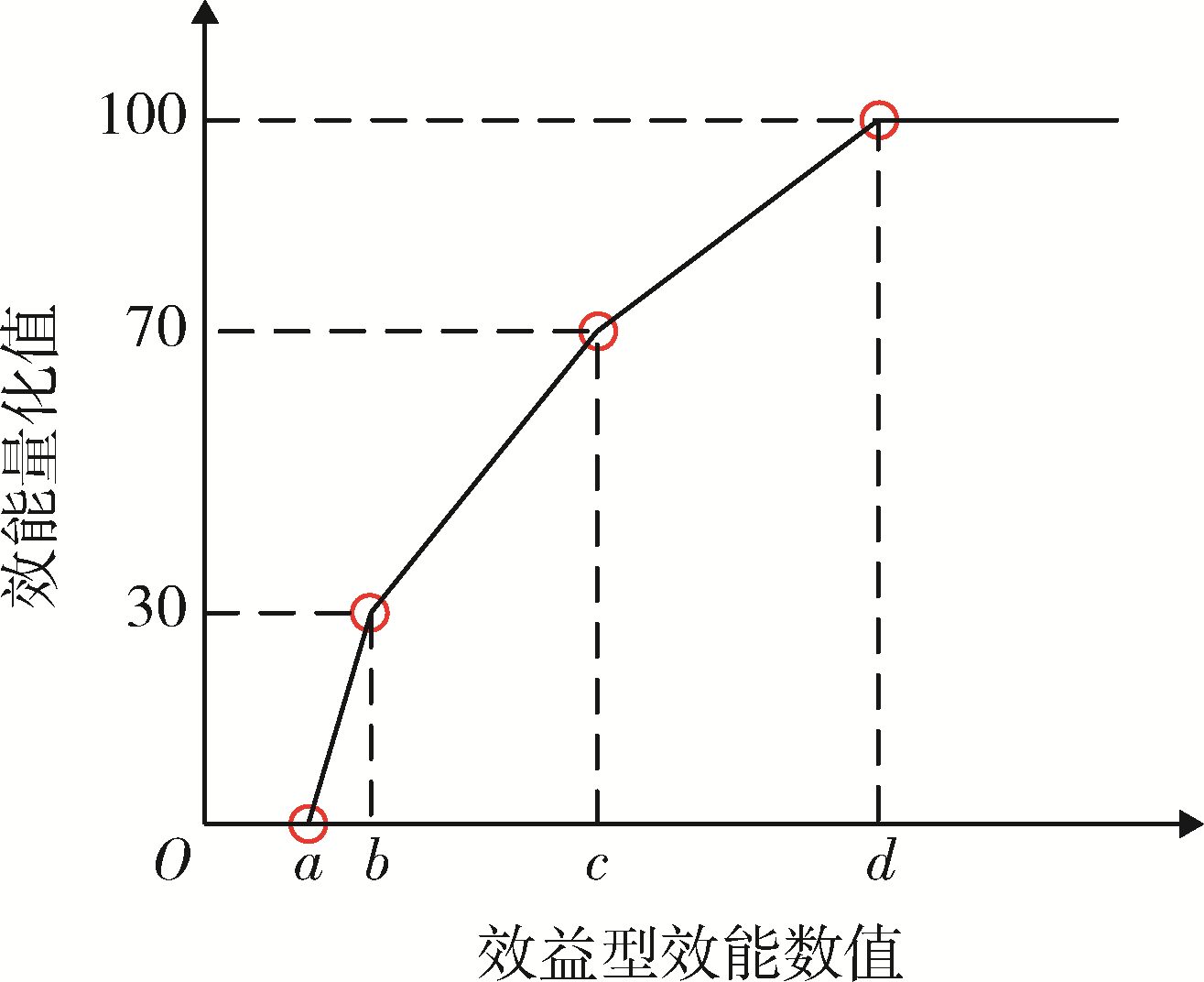
图4 递增折线函数
Fig. 4 Incremental polyline function
| n | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|
| RI | 0.52 | 0.89 | 1.12 | 1.24 | 1.36 | 1.41 | 1.46 |
表2 随机一致性指数
Table 2 Random consistency index
| n | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|
| RI | 0.52 | 0.89 | 1.12 | 1.24 | 1.36 | 1.41 | 1.46 |
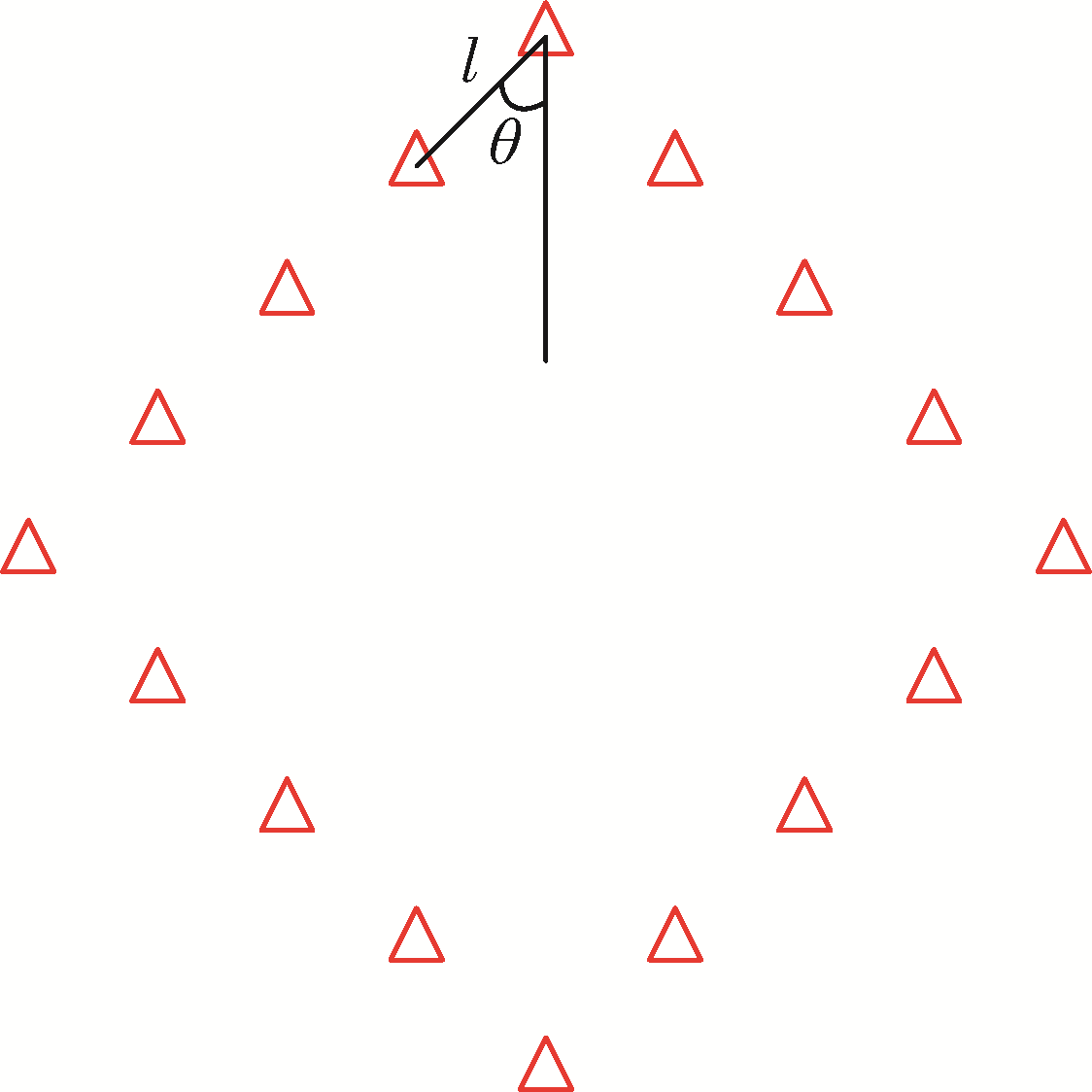
图5 菱形构型及构型参数
Fig. 5 Diamond configuration and configuration parameters
| 最优构型的DE算法 |
|---|
输入:种群数量N,参数维数D,最大进化代数G,变异算子F,交叉算子CR,变量上限Xs,变量下限Xx。 输出:最优效能值p,最优构型参数l,θ。 1.while 不满足终止条件 2.根据N,Xs,Xx生成初始种群 x。 3.计算种群 x 每个个体的效能值,并计算出最大效 能值。 4.fori∈种群 x 每个个体 变异操作: v =x1+F*(x2-x3),式中:x1、x2、x3为种群中随机挑选的三个父个体。 交叉操作:ifrand<CRord=drand u = v else u = x end if,式中:rand是[0,1]均匀分布的随机数,d是D中第d个参数,drand ∈[1,…,D],保证交叉。 计算 u 的每个个体的效能值 ifp( ui )>p( xi ) and vcom( ui ) xi 替换 ui end if end for end while |
表3 DE算法
Table 3 DE optimization algorithm
| 最优构型的DE算法 |
|---|
输入:种群数量N,参数维数D,最大进化代数G,变异算子F,交叉算子CR,变量上限Xs,变量下限Xx。 输出:最优效能值p,最优构型参数l,θ。 1.while 不满足终止条件 2.根据N,Xs,Xx生成初始种群 x。 3.计算种群 x 每个个体的效能值,并计算出最大效 能值。 4.fori∈种群 x 每个个体 变异操作: v =x1+F*(x2-x3),式中:x1、x2、x3为种群中随机挑选的三个父个体。 交叉操作:ifrand<CRord=drand u = v else u = x end if,式中:rand是[0,1]均匀分布的随机数,d是D中第d个参数,drand ∈[1,…,D],保证交叉。 计算 u 的每个个体的效能值 ifp( ui )>p( xi ) and vcom( ui ) xi 替换 ui end if end for end while |
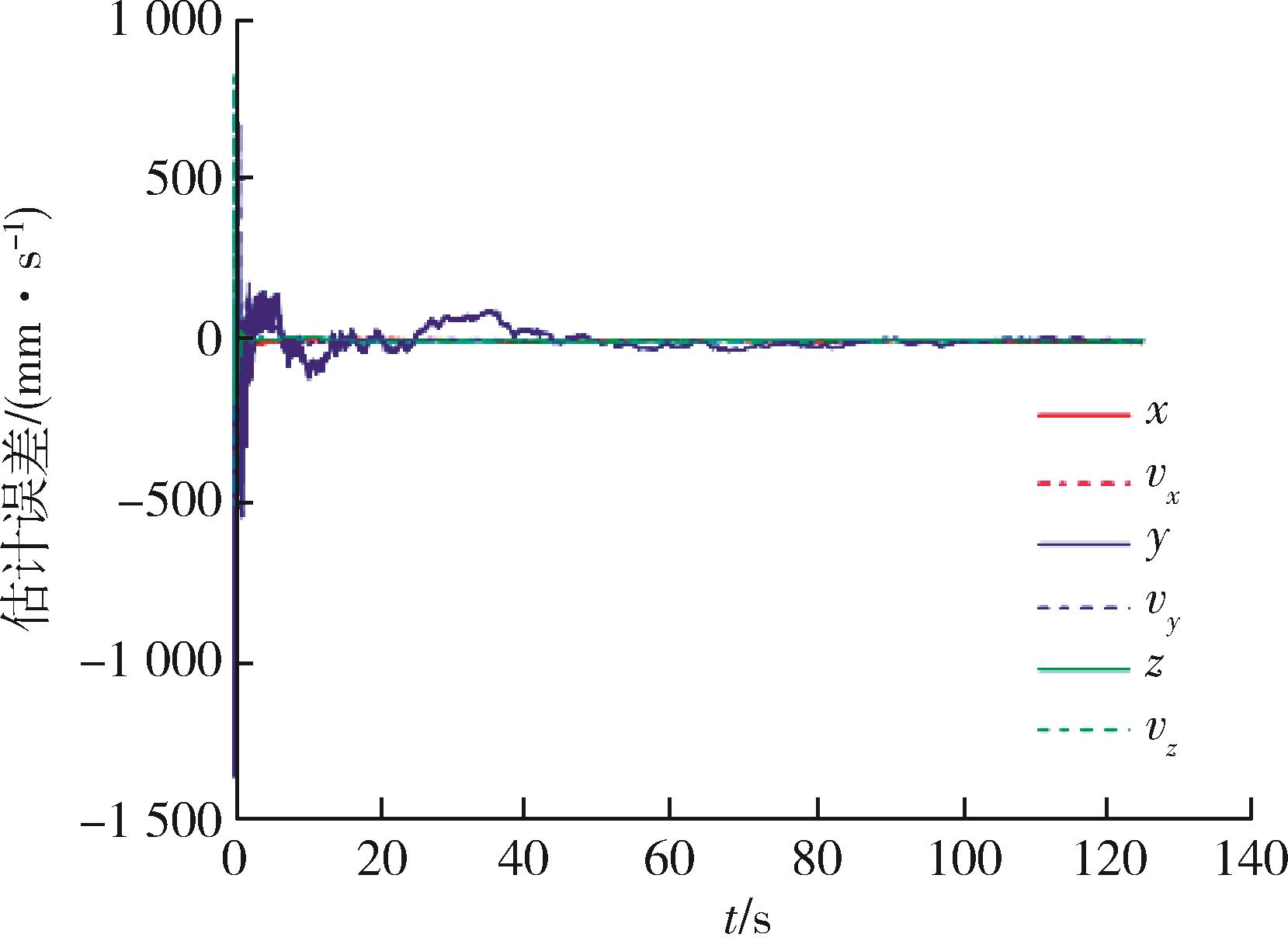
图6 被动多平台协同跟踪误差
Fig. 6 Passive cooperative tracking error
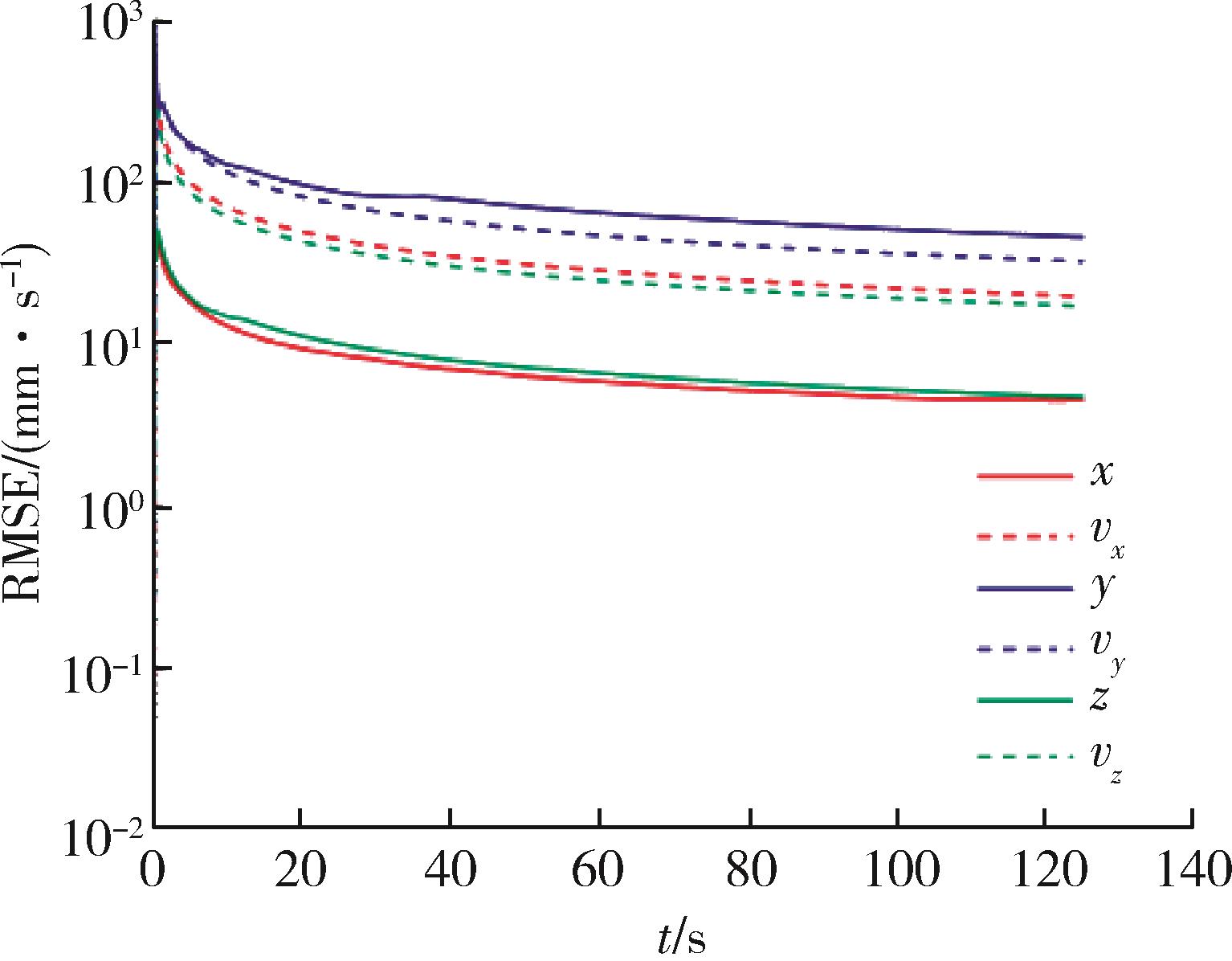
图7 被动多平台协同跟踪误差RMSE
Fig. 7 Passive cooperative tracking error RMSE
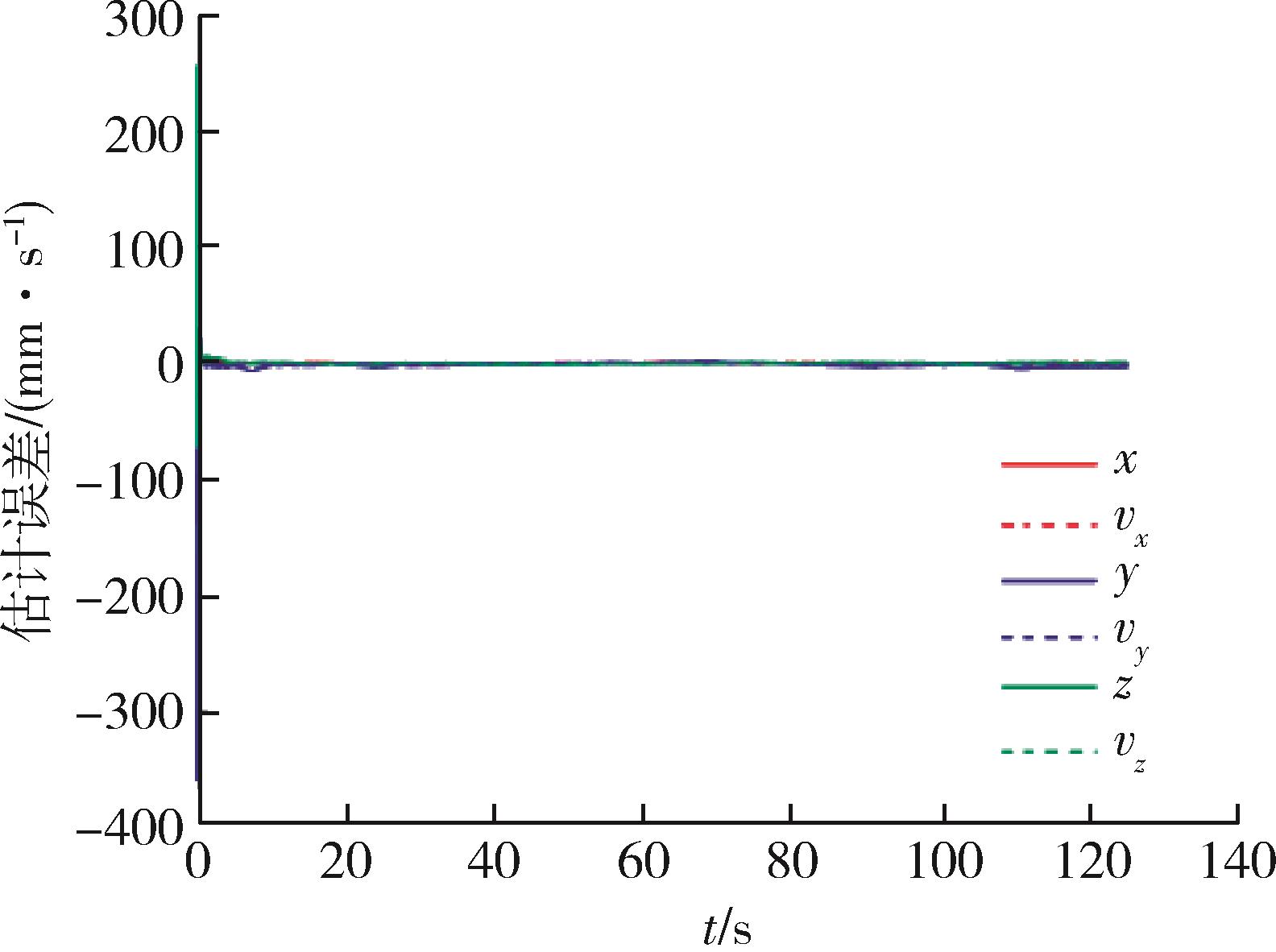
图8 主被动多平台协同跟踪误差
Fig. 8 Active and passive cooperative tracking error
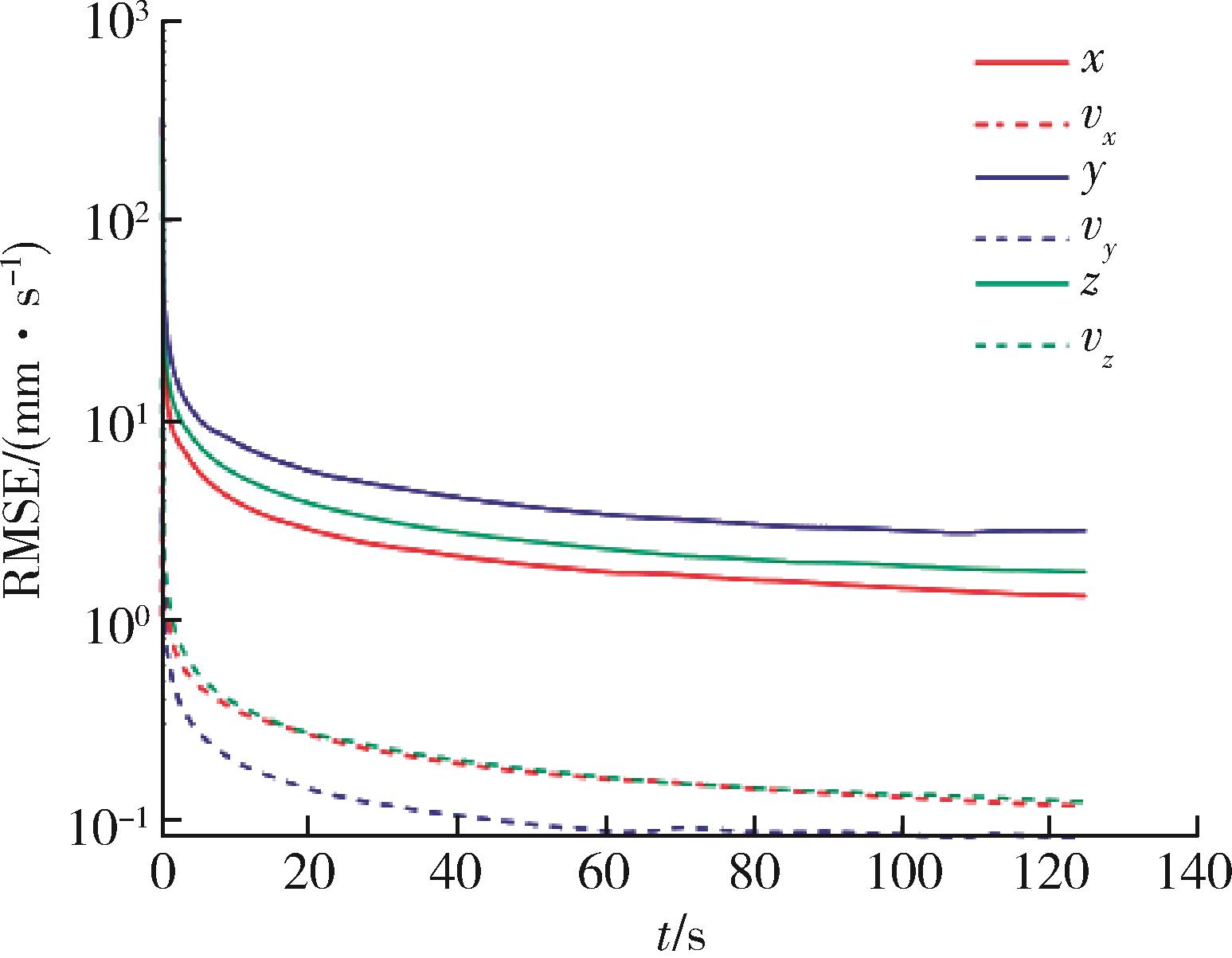
图9 主被动多平台协同跟踪误差RMSE
Fig. 9 Active and passive cooperative tracking error RMSE
| 效能 | 被动多平台协同 | 主被动多平台协同 |
|---|---|---|
| 成功跟踪概率 | 0.378 5 | 0.911 2 |
| 最大跟踪稳定时间/s | 9.312 0 | 111.884 0 |
| 最大跟踪距离/km | 279.413 0 | 171.169 0 |
| 最终x向位置跟踪误差/m | 1.492 8 | 0.527 2 |
| 最终y向位置跟踪误差/m | 9.730 9 | -1.628 4 |
| 最终z向位置跟踪误差/m | -1.636 1 | -2.514 2 |
| 最终x向速度跟踪误差/(m·s-1) | 0.105 0 | -0.032 1 |
| 最终y向速度跟踪误差/(m·s-1) | 0.112 2 | -0.054 0 |
| 最终z向速度跟踪误差/(m·s-1) | -0.029 1 | -0.140 7 |
表4 l=10 km,θ=45°时被动、主被动多平台协同跟踪结果
Table 4 Passive, active and passive cooperative tracking effectiveness results when l=10 km,θ=45°
| 效能 | 被动多平台协同 | 主被动多平台协同 |
|---|---|---|
| 成功跟踪概率 | 0.378 5 | 0.911 2 |
| 最大跟踪稳定时间/s | 9.312 0 | 111.884 0 |
| 最大跟踪距离/km | 279.413 0 | 171.169 0 |
| 最终x向位置跟踪误差/m | 1.492 8 | 0.527 2 |
| 最终y向位置跟踪误差/m | 9.730 9 | -1.628 4 |
| 最终z向位置跟踪误差/m | -1.636 1 | -2.514 2 |
| 最终x向速度跟踪误差/(m·s-1) | 0.105 0 | -0.032 1 |
| 最终y向速度跟踪误差/(m·s-1) | 0.112 2 | -0.054 0 |
| 最终z向速度跟踪误差/(m·s-1) | -0.029 1 | -0.140 7 |
| 效能 | 类型 | a | b | c | d |
|---|---|---|---|---|---|
| 成功跟踪概率 | 效益型 | 0.1 | 0.3 | 0.5 | 0.8 |
| 最大跟踪稳定时间/s | 效益型 | 5 | 25 | 75 | 125 |
| 最大跟踪距离(被动)/km | 效益型 | 175 | 200 | 250 | 300 |
| 最大跟踪距离(主被动)/km | 效益型 | 50 | 75 | 125 | 175 |
| 最终x向位置跟踪误差/m | 成本型 | 500 | 200 | 50 | 10 |
| 最终y向位置跟踪误差/m | 成本型 | 500 | 200 | 50 | 10 |
| 最终z向位置跟踪误差/m | 成本型 | 500 | 200 | 50 | 10 |
| 最终x向速度跟踪误差/(m·s-1) | 成本型 | 25 | 10 | 2.5 | 0.5 |
| 最终y向速度跟踪误差/(m·s-1) | 成本型 | 25 | 10 | 2.5 | 0.5 |
| 最终z向速度跟踪误差/(m·s-1) | 成本型 | 25 | 10 | 2.5 | 0.5 |
表5 效能量化函数参数
Table 5 Performance quantification function parameters
| 效能 | 类型 | a | b | c | d |
|---|---|---|---|---|---|
| 成功跟踪概率 | 效益型 | 0.1 | 0.3 | 0.5 | 0.8 |
| 最大跟踪稳定时间/s | 效益型 | 5 | 25 | 75 | 125 |
| 最大跟踪距离(被动)/km | 效益型 | 175 | 200 | 250 | 300 |
| 最大跟踪距离(主被动)/km | 效益型 | 50 | 75 | 125 | 175 |
| 最终x向位置跟踪误差/m | 成本型 | 500 | 200 | 50 | 10 |
| 最终y向位置跟踪误差/m | 成本型 | 500 | 200 | 50 | 10 |
| 最终z向位置跟踪误差/m | 成本型 | 500 | 200 | 50 | 10 |
| 最终x向速度跟踪误差/(m·s-1) | 成本型 | 25 | 10 | 2.5 | 0.5 |
| 最终y向速度跟踪误差/(m·s-1) | 成本型 | 25 | 10 | 2.5 | 0.5 |
| 最终z向速度跟踪误差/(m·s-1) | 成本型 | 25 | 10 | 2.5 | 0.5 |
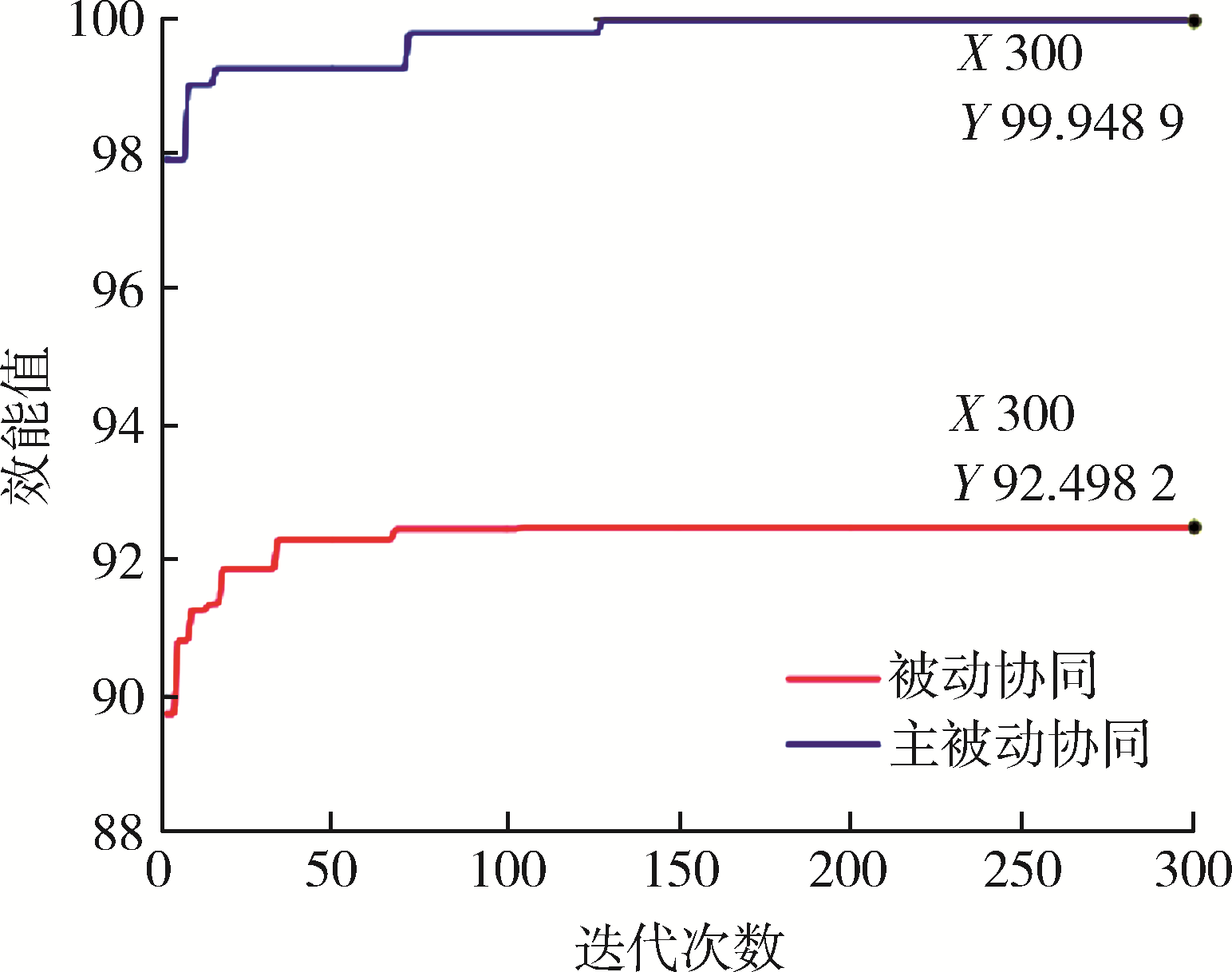
图10 被动、主被动多平台协同DE算法迭代曲线
Fig. 10 Passive, active and passive collaborative DE optimization iteration curve
| 最优构型参数、跟踪效能 | 被动多平台协同 | 主被动多平台协同 |
|---|---|---|
| 平台间距离l/km | 28.649 9 | 21.237 3 |
| 平台间夹角θ/(°) | 81.430 9 | 47.916 4 |
| 成功跟踪概率 | 0.637 4 | 0.996 0 |
| 最大跟踪稳定时间/s | 51.075 0 | 124.325 0 |
| 最大跟踪距离/km | 276.038 0 | 174.817 0 |
| 最终x向位置跟踪误差/m | 4.791 5 | -1.138 1 |
| 最终y向位置跟踪误差/m | 5.249 4 | -2.383 8 |
| 最终z向位置跟踪误差/m | 0.269 7 | -0.726 5 |
| 最终x向速度跟踪误差/(m·s-1) | 0.090 3 | -0.034 9 |
| 最终y向速度跟踪误差/(m·s-1) | 0.132 4 | -0.032 9 |
| 最终z向速度跟踪误差/(m·s-1) | 0.002 8 | 0.079 1 |
表6 被动、主被动多平台协同最优构型参数及跟踪效能
Table 6 Optimal configuration parameters and tracking effectiveness for passive, active and passive collaboration
| 最优构型参数、跟踪效能 | 被动多平台协同 | 主被动多平台协同 |
|---|---|---|
| 平台间距离l/km | 28.649 9 | 21.237 3 |
| 平台间夹角θ/(°) | 81.430 9 | 47.916 4 |
| 成功跟踪概率 | 0.637 4 | 0.996 0 |
| 最大跟踪稳定时间/s | 51.075 0 | 124.325 0 |
| 最大跟踪距离/km | 276.038 0 | 174.817 0 |
| 最终x向位置跟踪误差/m | 4.791 5 | -1.138 1 |
| 最终y向位置跟踪误差/m | 5.249 4 | -2.383 8 |
| 最终z向位置跟踪误差/m | 0.269 7 | -0.726 5 |
| 最终x向速度跟踪误差/(m·s-1) | 0.090 3 | -0.034 9 |
| 最终y向速度跟踪误差/(m·s-1) | 0.132 4 | -0.032 9 |
| 最终z向速度跟踪误差/(m·s-1) | 0.002 8 | 0.079 1 |
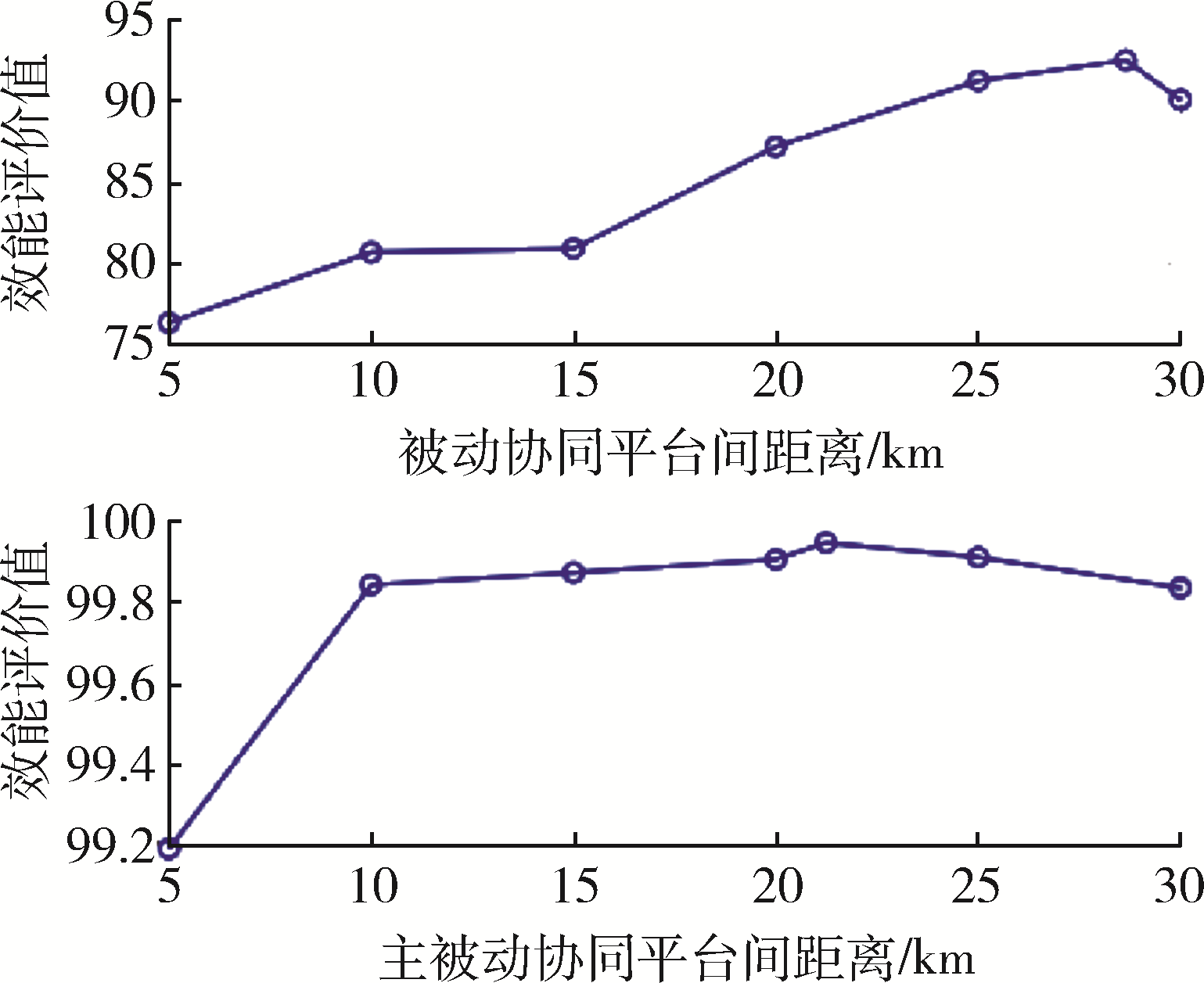
图11 不同平台间距下效能值对比
Fig. 11 Comparison under different platform spacing
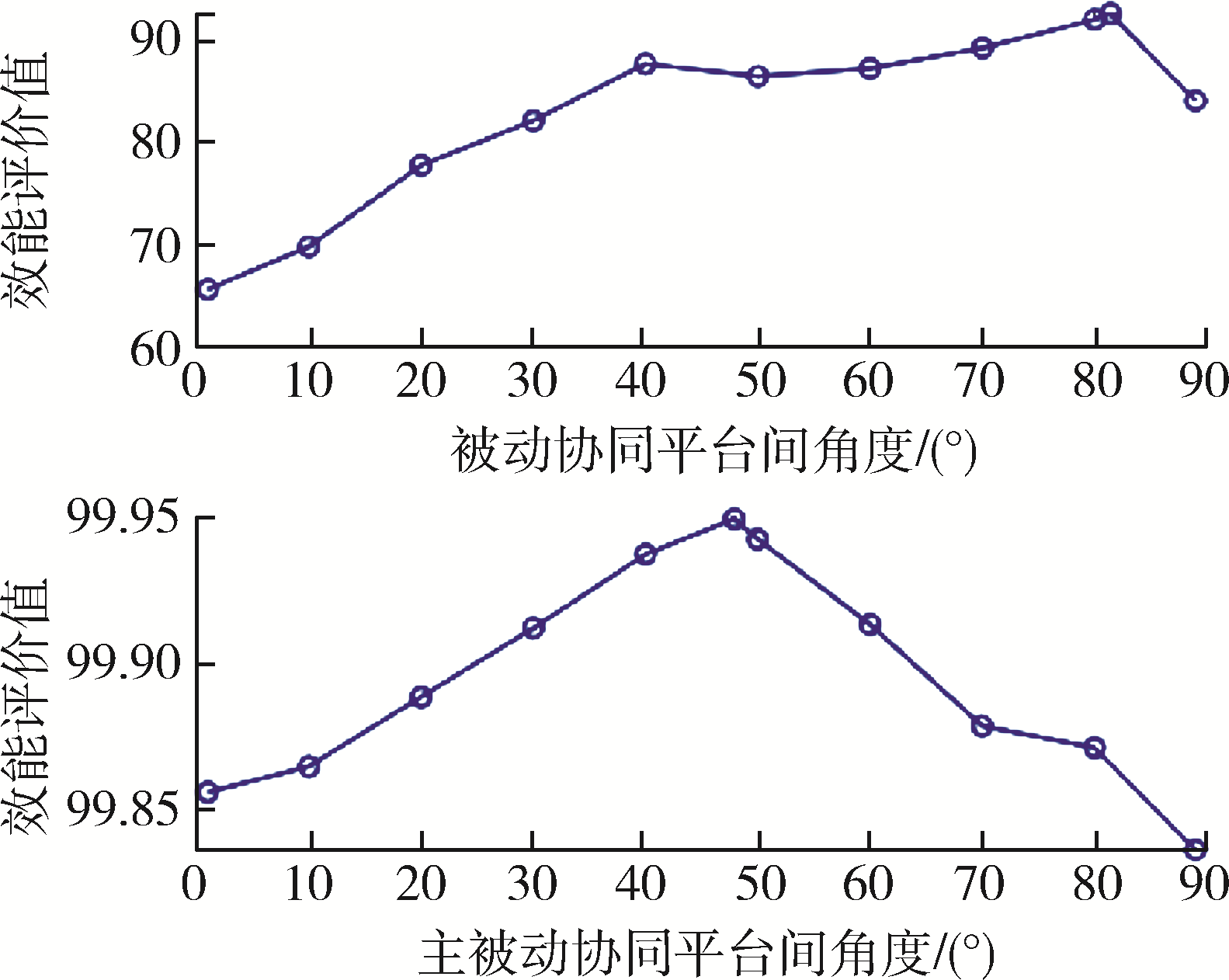
图12 不同平台夹角下效能值对比
Fig. 12 Comparison under different platform angles
| 1 | XU Xingguang, CHEN Changrong, REN Zhang, et al. Multiple Tactical Missiles Cooperative Attack with Formation-Containment Tracking Requirement Along the Planned Trajectory[J]. IEEE Access, 2020, 8: 87929-87946. |
| 2 | 槐泽鹏, 梁雪超, 王洪波, 等. 多弹协同及其智能化发展研究[J]. 战术导弹技术, 2019(5): 77-85. |
| HUAI Zepeng, LIANG Xuechao, WANG Hongbo, et al. Research on Multi-missile Collaborative and Its Intelligence Development[J]. Tactical Missile Technology, 2019(5): 77-85. | |
| 3 | BALHANCE N, WEISS M, SHIMA T. Cooperative Guidance Law for Intrasalvo Tracking[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(6): 1441-1456. |
| 4 | HAN Xiaofei, HE Huafeng, ZHANG Qi, et al. Suppression of Deception-False-Target Jamming for Active/Passive Netted Radar Based on Position Error[J]. IEEE Sensors Journal, 2022, 22(8): 7902-7912. |
| 5 | 王振. 主被动雷达复合制导对抗方法研究[J]. 舰船电子工程, 2018, 38(7): 72-75. |
| WANG Zhen. Research on the Countermeasures for the Active-Passive Radar Composite Guidance Technique[J]. Ship Electronic Engineering, 2018, 38(7): 72-75. | |
| 6 | 尹依伊, 王晓芳, 田震, 等. 基于预设性能控制的多导弹编队方法[J]. 系统工程与电子技术, 2020, 42(12): 2847-2858. |
| YIN Yiyi, WANG Xiaofang, TIAN Zhen, et al. Multi-missile Formation Method Based on Prescribed Performance Control[J]. Systems Engineering and Electronics, 2020, 42(12): 2847-2858. | |
| 7 | LI Wei, WEN Qiuqiu, HE Lei, et al. Three-Dimensional Impact Angle Constrained Distributed Cooperative Guidance Law for Anti-ship Missiles[J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 447-459. |
| 8 | 俞宙, 单甘霖, 段修生. 面向区域覆盖的多传感器优化布站[J]. 现代防御技术, 2018, 46(6): 94-101. |
| YU Zhou, SHAN Ganlin, DUAN Xiusheng. Multi-sensor Optimal Deployment for Area Coverage[J]. Modern Defence Technology, 2018, 46(6): 94-101. | |
| 9 | 王程民, 平殿发, 张涵. 几种典型编队的多机无源定位布站分析[J]. 舰船电子工程, 2019, 39(7): 37-41. |
| WANG Chengmin, PING Dianfa, ZHANG Han. Analysis of Multi-aircraft Passive Location Stations of Several Aircraft Formations[J]. Ship Electronic Engineering, 2019, 39(7): 37-41. | |
| 10 | 王芳. 导弹编队协同突防-攻击一体化队形优化设计及最优控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2016. |
| WANG Fang. Research on Formation Optimal Design and Optimal Control for Integrative Penetration and Attack of Missile Formation Cooperation[D]. Harbin: Harbin Institute of Technology, 2016. | |
| 11 | 王鹏, 陈万春, 陈中原. 视场约束下攻击角度及时间控制三维协同制导[J]. 战术导弹技术, 2022(4): 30-40. |
| WANG Peng, CHEN Wanchun, CHEN Zhongyuan. Three-Dimensional Impact Angle and Time Control Cooperative Guidance with FOV Constraint[J]. Tactical Missile Technology, 2022(4): 30-40. | |
| 12 | 魏蓝, 李威, 单家元. 稀薄流区的多弹协同编队构型生成策略设计[J]. 系统工程与电子技术, 2020, 42(8): 1812-1819. |
| WEI Lan, LI Wei, SHAN Jiayuan. Flight Control Strategy of Multi-missile Formation in Thin Flow Zone[J]. Systems Engineering and Electronics, 2020, 42(8): 1812-1819. | |
| 13 | 王文龙, 王晓芳, 林海, 等. 拒止环境下多弹协同导航及编队优化设计[J]. 飞行力学, 2022, 40(6): 61-71. |
| WANG Wenlong, WANG Xiaofang, LIN Hai, et al. Multi-missiles Collaborative Navigation and Formation Optimization Design in Denial Environment[J]. Flight Dynamics, 2022, 40(6): 61-71. | |
| 14 | 邱玲, 沈振康. 三维纯角度被动跟踪定位的最小二乘-卡尔曼滤波算法[J]. 红外与激光工程, 2001, 30(2): 83-86. |
| QIU Ling, SHEN Zhenkang. LS-Kalman Algorithm for Passive Target Location and Tracking with Bearing-Only Measurements[J]. Infrared and Laser Engineering, 2001, 30(2): 83-86. | |
| 15 | 费惠佳, 崔连虎. 反舰导弹抗干扰性能分析与评估方法[J]. 弹箭与制导学报, 2020, 40(4): 95-98. |
| FEI Huijia, CUI Lianhu. Anti-jamming Performance Analysis and Evaluation Method for Anti-ship Missile[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2020, 40(4): 95-98. | |
| 16 | 杨剑波, 宗思光. 基于模糊-ADC的反舰导弹武器系统效能评估方法研究[J]. 现代防御技术, 2021, 49(3): 55-62, 72. |
| YANG Jianbo, ZONG Siguang. Research on Effectivess Evaluation Method of Anti-ship Missile Weapon System Based on Fuzzy-ADC Model[J]. Modern Defence Technology, 2021, 49(3): 55-62, 72. | |
| 17 | GODRICH H, HAIMOVICH A M, BLUM R S. Target Localization Accuracy Gain in MIMO Radar-Based Systems[J]. IEEE Transactions on Information Theory, 2010, 56(6): 2783-2803. |
| 18 | BARRO P A, ZENNARO M, PIETROSEMOLI E. TLTN-The Local Things Network: on the Design of a LoRaWAN Gateway with Autonomous Servers for Disconnected Communities[C]∥2019 Wireless Days (WD). Piscataway, NJ, USA: IEEE, 2019: 1-4. |
| 19 | STORN R, PRICE K. Differential Evolution-A Simple and Efficient Heuristic for Global Optimization Over Continuous Spaces[J]. Journal of Global Optimization, 1997, 11(4): 341-359. |
| [1] | 李喆, 童逸琦, 夏文博, 应宇欣. 一种多源集中式空中目标类型综合识别方法[J]. 现代防御技术, 2023, 51(4): 53-62. |
| [2] | 杨鑫, 许卫东, 刘朝畅, 贾其, 郝有斌. 基于AHP和集对分析的自适应伪装系统综合评级[J]. 现代防御技术, 2023, 51(2): 109-118. |
| [3] | 李迎博, 谭黎立, 王凯旋, 梁卓, 潘彦鹏. 一种基于构件重要度的软件可靠性评估方法[J]. 现代防御技术, 2022, 50(6): 103-109. |
| [4] | 周方宇, 周洁, 陈超波, 高嵩. 基于克隆免疫决策的无人机集群协同探测跟踪[J]. 现代防御技术, 2022, 50(5): 93-105. |
| [5] | 翟芸, 胡冰, 施端阳. 基于改进AHP-熵权法的雷达装备可靠性评估指标赋权方法[J]. 现代防御技术, 2022, 50(4): 148-155. |
| [6] | 李威, 卢盈齐. 基于聚类组合赋权的空袭目标威胁评估方法[J]. 现代防御技术, 2022, 50(3): 17-24. |
| [7] | 安雷, 李召瑞, 吉兵. 辐射风险和多目标跟踪精度约束下的传感器调度方法[J]. 现代防御技术, 2021, 49(6): 56-67. |
| [8] | 张馨予, 胡冰, 张逸楠, 边志芸. 基于改进Grey-AHP的雷达装备维修性评估方法[J]. 现代防御技术, 2021, 49(5): 78-87. |
| [9] | 姚恺, 黄少罗, 王晋生, 刘月河. 基于优化AHP的远火模拟训练成绩自主评定方法[J]. 现代防御技术, 2021, 49(4): 99-106. |
| [10] | 李海君, 徐廷学. 基于组合赋权-改进灰色关联的导弹状态评估决策[J]. 现代防御技术, 2021, 49(4): 91-98. |
| [11] | 杨剑波, 宗思光. 基于模糊-ADC的反舰导弹武器系统效能评估方法研究[J]. 现代防御技术, 2021, 49(3): 55-62. |
| [12] | 汪浩. 基于OODA的舰艇编队防空体系作战效能评估研究[J]. 现代防御技术, 2020, 48(6): 19-25. |
| [13] | 赵凯丽, 高火涛, 曹婷. 临近空间高超声速目标跟踪IMMCPF算法[J]. 现代防御技术, 2018, 46(5): 94-101. |
| [14] | 姜天娇, 范秀英, 黄新宇. 改进层次分析法在侦察设备规划中的应用[J]. 现代防御技术, 2018, 46(5): 62-68. |
| [15] | 李皆乔, 聂成龙, 邱华磊. 博弈论综合赋权的军用飞机作战适用性评价[J]. 现代防御技术, 2018, 46(1): 178-183. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
