

现代防御技术 ›› 2025, Vol. 53 ›› Issue (5): 182-196.DOI: 10.3969/j.issn.1009-086x.2025.05.019
• 测试、发射技术 • 上一篇
张帅, 韩小文, 冀翔, 臧振宇, 李喆, 权晓岚, 贺振宇
收稿日期:2024-07-01
修回日期:2024-10-20
出版日期:2025-10-28
发布日期:2025-11-03
作者简介:张帅(1996-),男,河南商水人。工程师,硕士,研究方向为机电一体化。
Shuai ZHANG, Xiaowen HAN, Xiang JI, Zhenyu ZANG, Zhe LI, Xiaolan QUAN, Zhenyu HE
Received:2024-07-01
Revised:2024-10-20
Online:2025-10-28
Published:2025-11-03
摘要:
为最大程度设计具备高任务可靠性智能设备,在冗余热备理念的指导下,采用模块化数据构建方式,设计出一种全国产化状态的高可靠发控数据处理设备。通过嵌入式软硬件协同编程方式构建功能模块,确保双主机满足多种总线形式的外部冗余通信需求。内部控制逻辑实现过程中,将故障监测逻辑与信息交互流程融入发控软件中,采用基于远程判别的三重心跳检测机制及基于任务的数据同步方法实现主备切换,最大程度上确保切换流程稳定可靠。通过拷机验证、故障模拟和可靠性建模的计算该设备可靠性指标,测试结果表明:设计的基于双主机冗余的高可靠发控数据处理设备可实现故障监测和主从机件核心数据实时共享,保证单主机故障后发射任务进一步实施。与单主机相比,任务可靠度提升23.6%。
中图分类号:
张帅, 韩小文, 冀翔, 臧振宇, 李喆, 权晓岚, 贺振宇. 双主机冗余的发控数据处理设备的设计与实现[J]. 现代防御技术, 2025, 53(5): 182-196.
Shuai ZHANG, Xiaowen HAN, Xiang JI, Zhenyu ZANG, Zhe LI, Xiaolan QUAN, Zhenyu HE. Design and Implementation of Launch Control Data Processing Equipment Based on Dual-host Redundancy[J]. Modern Defense Technology, 2025, 53(5): 182-196.
| 主板A | 电源A | 通信板A | 箱体 | 显示模块 | 键鼠模块 | |
|---|---|---|---|---|---|---|
| 复杂因子 | 9 | 7 | 6 | 4 | 4 | 2 |
| 技术成熟水平因子 | 4 | 5 | 4 | 5 | 3 | 1 |
| 元器件质量因子 | 10 | 5 | 5 | 5 | 5 | 4 |
| 环境因子 | 4 | 4 | 4 | 7 | 8 | 8 |
| 重要性因子 | 8 | 8 | 8 | 4 | 2 | 2 |
| 各单元评分数ci | 11 520 | 5 600 | 3 840 | 2 800 | 960 | 128 |
| 各单元评分系数ωi | 0.463 619 | 0.225 37 | 0.154 54 | 0.112 685 | 0.038 635 | 0.005 151 |
表1 发控数据处理设备各单元加权因子表
Table 1 Table of weighting factors for each unit of launch control data processing equipment
| 主板A | 电源A | 通信板A | 箱体 | 显示模块 | 键鼠模块 | |
|---|---|---|---|---|---|---|
| 复杂因子 | 9 | 7 | 6 | 4 | 4 | 2 |
| 技术成熟水平因子 | 4 | 5 | 4 | 5 | 3 | 1 |
| 元器件质量因子 | 10 | 5 | 5 | 5 | 5 | 4 |
| 环境因子 | 4 | 4 | 4 | 7 | 8 | 8 |
| 重要性因子 | 8 | 8 | 8 | 4 | 2 | 2 |
| 各单元评分数ci | 11 520 | 5 600 | 3 840 | 2 800 | 960 | 128 |
| 各单元评分系数ωi | 0.463 619 | 0.225 37 | 0.154 54 | 0.112 685 | 0.038 635 | 0.005 151 |
| ci | MTBCFi | |||
|---|---|---|---|---|
| 合计 | 1 | 28 848 | 10 000 | 100 |
| 主板 | 0.463 619 | 11 520 | 21 569.4 | 46.361 88 |
| 电源 | 0.225 37 | 5 600 | 44 371.4 | 22.537 03 |
| 通信板 | 0.154 54 | 3 840 | 64 708.3 | 15.453 96 |
| 箱体 | 0.112 685 | 2 800 | 88 742.9 | 11.268 51 |
| 显示模块 | 0.038 635 | 960 | 258 833.3 | 3.863 490 |
| 键鼠模块 | 0.005 151 | 128 | 1 941 250 | 0.515 132 |
表2 可靠性指标分配结果
Table 2 Reliability index assignment result
| ci | MTBCFi | |||
|---|---|---|---|---|
| 合计 | 1 | 28 848 | 10 000 | 100 |
| 主板 | 0.463 619 | 11 520 | 21 569.4 | 46.361 88 |
| 电源 | 0.225 37 | 5 600 | 44 371.4 | 22.537 03 |
| 通信板 | 0.154 54 | 3 840 | 64 708.3 | 15.453 96 |
| 箱体 | 0.112 685 | 2 800 | 88 742.9 | 11.268 51 |
| 显示模块 | 0.038 635 | 960 | 258 833.3 | 3.863 490 |
| 键鼠模块 | 0.005 151 | 128 | 1 941 250 | 0.515 132 |
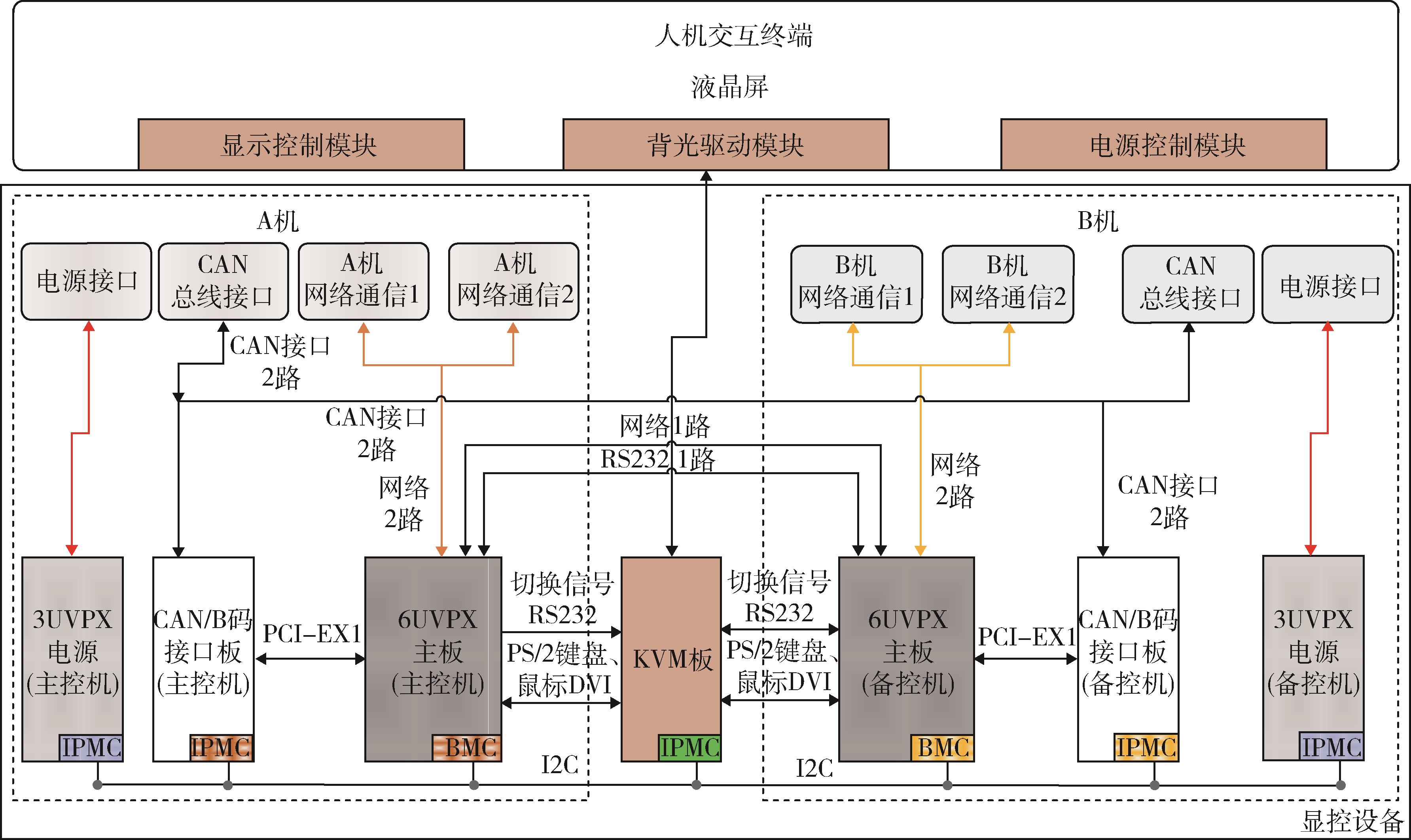
图1 发控数据处理设备原理图
Fig. 1 Schematic diagram of launch control data processing equipment
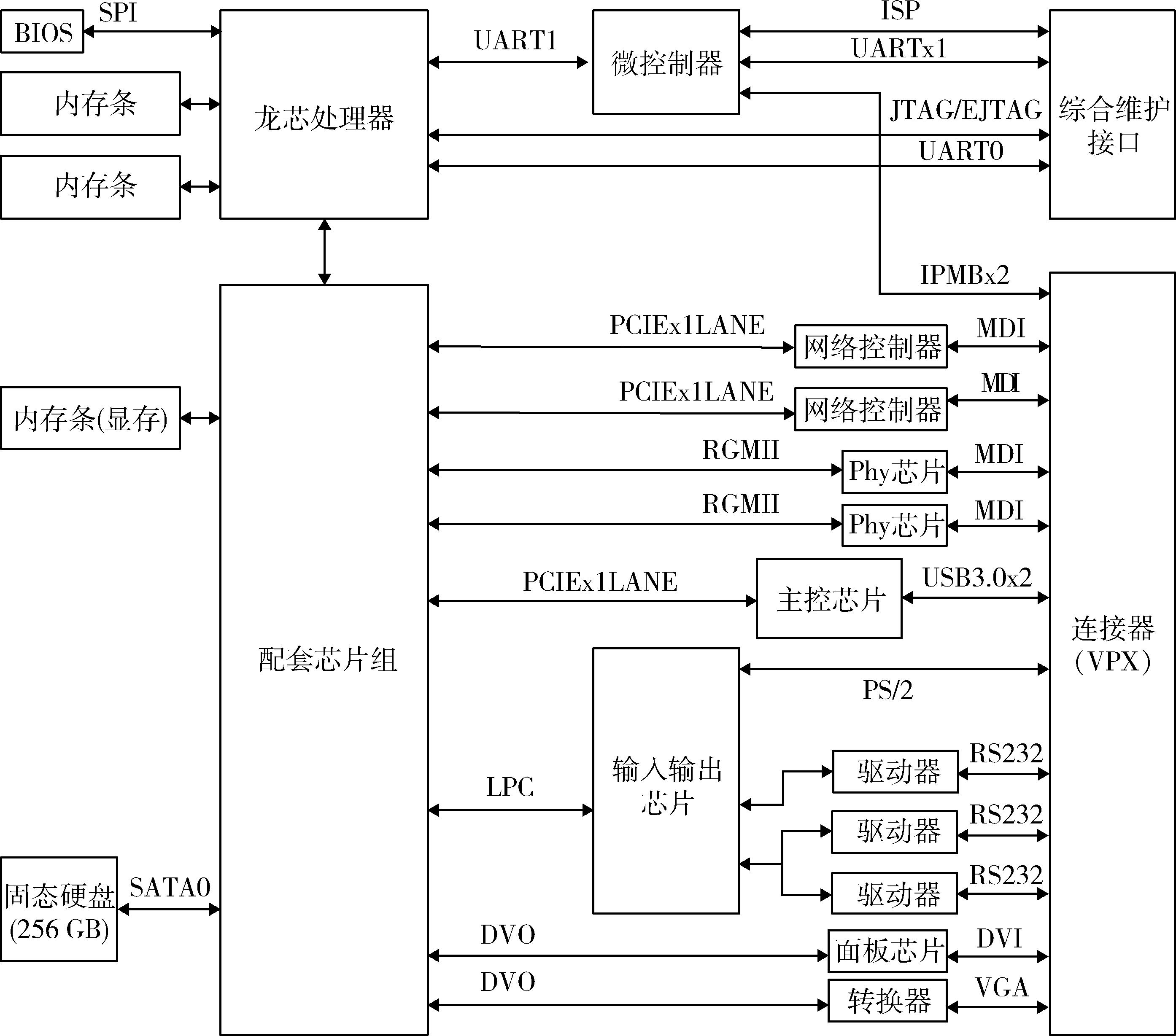
图2 数据处理设备主板原理图
Fig. 2 Data processing equipment motherboard schematic
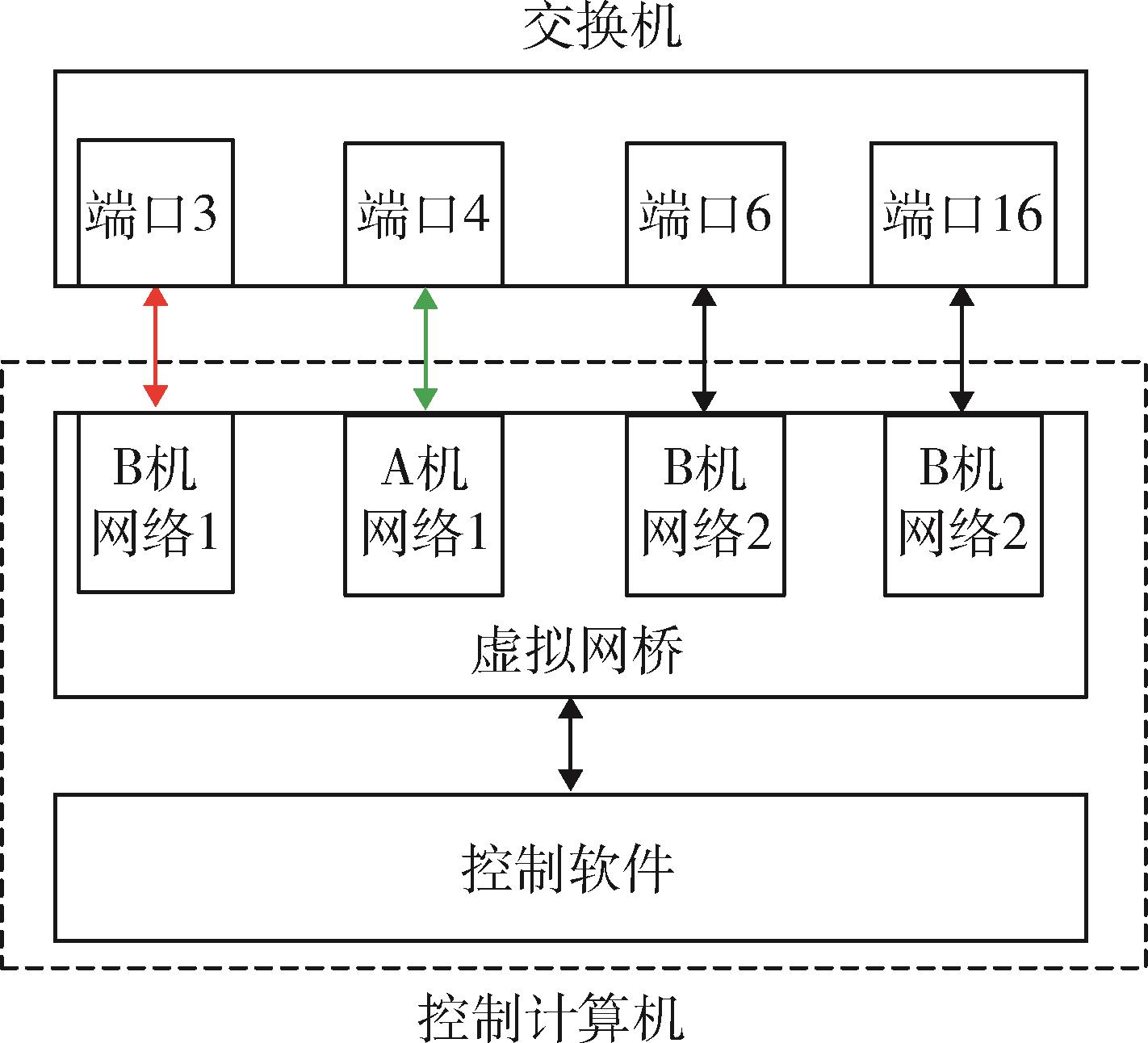
图3 控制软件通信逻辑关系图
Fig. 3 Control software communication logic diagram
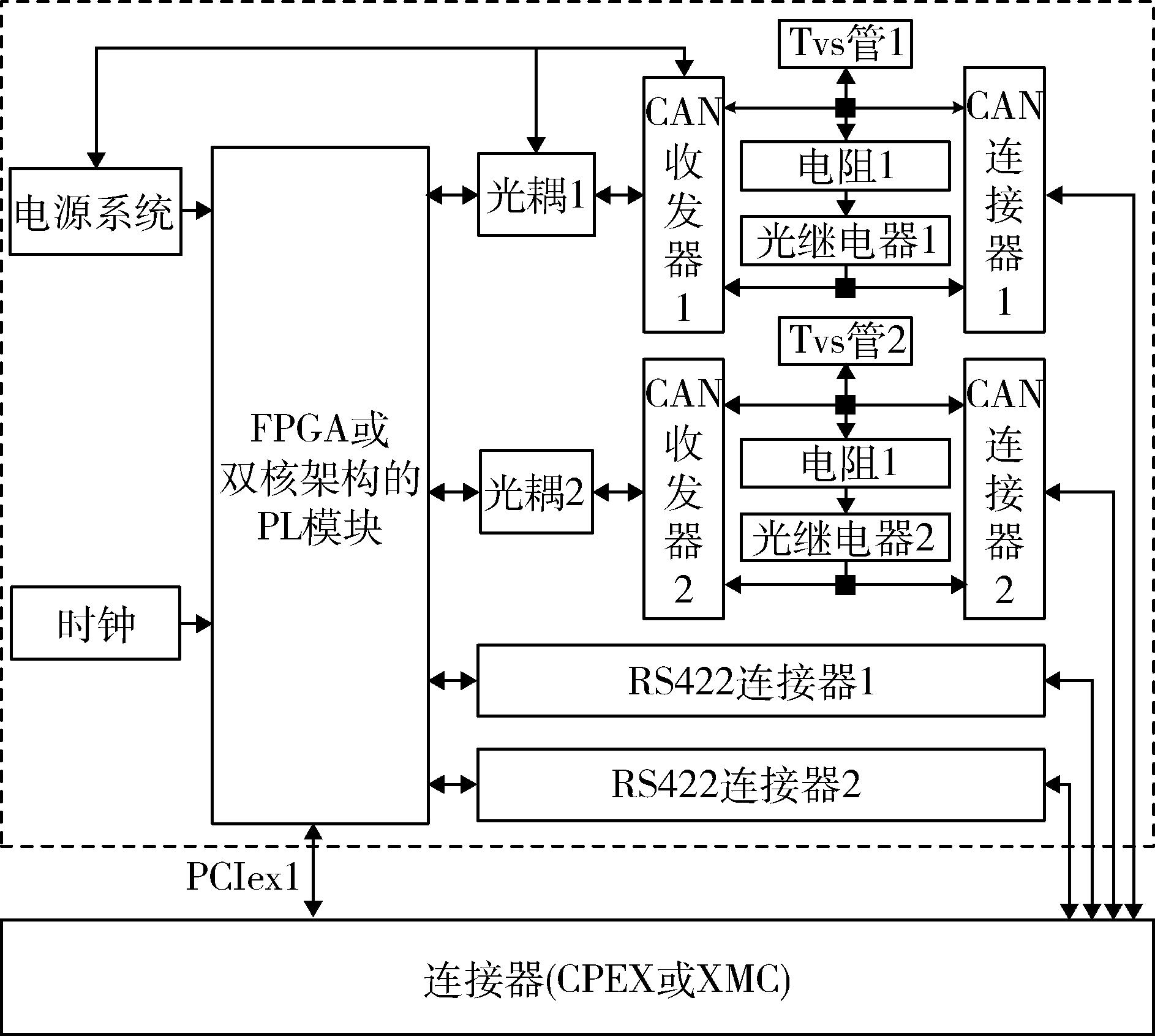
图4 通信板原理图
Fig. 4 Communication board schematic diagram
| 报文号 | 报文信息 | 报文长度 | 报文定义 |
|---|---|---|---|
| 1 | 报文标识 | UInt32 | 0xFFEEFFEE |
| 2 | 报文长度 | UInt16 | 不定长 |
| 3 | 发送方 | UChar8 | A机:0x11;B机:0x22 |
| 4 | 主备标识 | UChar8 | 主模式:0x11;备模式:0x22 |
| 5 | 报文发送次数 | UInt16 | 1~65 535,发送方自行循环计数 |
| 6 | 当前任务状态 | UInt8 | 0:任务1;1:任务2;…;n:任务n |
| 7 | 任务进程1执行情况 | UIn8 | 执行状态:0:正常;1:未执行;2:执行中;3:异常 |
| 8 | 任务子进程2执行情况 | Uin16 | 0:默认状态 |
| 9 | 附带数据信息(变长) | Uin16 | 自定 |
表3 系统进程信息
Table 3 System process information
| 报文号 | 报文信息 | 报文长度 | 报文定义 |
|---|---|---|---|
| 1 | 报文标识 | UInt32 | 0xFFEEFFEE |
| 2 | 报文长度 | UInt16 | 不定长 |
| 3 | 发送方 | UChar8 | A机:0x11;B机:0x22 |
| 4 | 主备标识 | UChar8 | 主模式:0x11;备模式:0x22 |
| 5 | 报文发送次数 | UInt16 | 1~65 535,发送方自行循环计数 |
| 6 | 当前任务状态 | UInt8 | 0:任务1;1:任务2;…;n:任务n |
| 7 | 任务进程1执行情况 | UIn8 | 执行状态:0:正常;1:未执行;2:执行中;3:异常 |
| 8 | 任务子进程2执行情况 | Uin16 | 0:默认状态 |
| 9 | 附带数据信息(变长) | Uin16 | 自定 |
| 报文号 | 报文信息 | 报文长度 | 报文定义 |
|---|---|---|---|
| 1 | 报文标识 | UInt32 | 0xAA55AA55 |
| 2 | 报文长度 | UInt16 | 14 |
| 3 | 发送方 | UChar8 | A机:0x11;B机:0x22 |
| 4 | 主备标识 | UChar8 | 主模式:0x11;备模式:0x22 |
| 5 | 报文发送次数 | UInt16 | 1~655 35,发送方自行循环计数 |
| 6 | 工作状态 | UInt8 | 0xAA:联机;0x55本地;0x11:初始化界面 |
| 7 | 工作模式 | UInt8 | 0001,作战;0010,值班;0100,训练;1000,测试维护; |
| 8 | 系统进程状态1 (系统命令) | UInt16 | 0:未执行;1:正常;2:执行中;3:异常 Bit0~Bit1:预留;Bit2~Bit3:命令1;Bit4~Bit5:命令2;Bit6~Bit7:命令3;Bit8~Bit9:命令4;Bit10~Bit11:命令5;Bit11~Bit15:预留 |
表4 系统状态更新
Table 4 System status update
| 报文号 | 报文信息 | 报文长度 | 报文定义 |
|---|---|---|---|
| 1 | 报文标识 | UInt32 | 0xAA55AA55 |
| 2 | 报文长度 | UInt16 | 14 |
| 3 | 发送方 | UChar8 | A机:0x11;B机:0x22 |
| 4 | 主备标识 | UChar8 | 主模式:0x11;备模式:0x22 |
| 5 | 报文发送次数 | UInt16 | 1~655 35,发送方自行循环计数 |
| 6 | 工作状态 | UInt8 | 0xAA:联机;0x55本地;0x11:初始化界面 |
| 7 | 工作模式 | UInt8 | 0001,作战;0010,值班;0100,训练;1000,测试维护; |
| 8 | 系统进程状态1 (系统命令) | UInt16 | 0:未执行;1:正常;2:执行中;3:异常 Bit0~Bit1:预留;Bit2~Bit3:命令1;Bit4~Bit5:命令2;Bit6~Bit7:命令3;Bit8~Bit9:命令4;Bit10~Bit11:命令5;Bit11~Bit15:预留 |
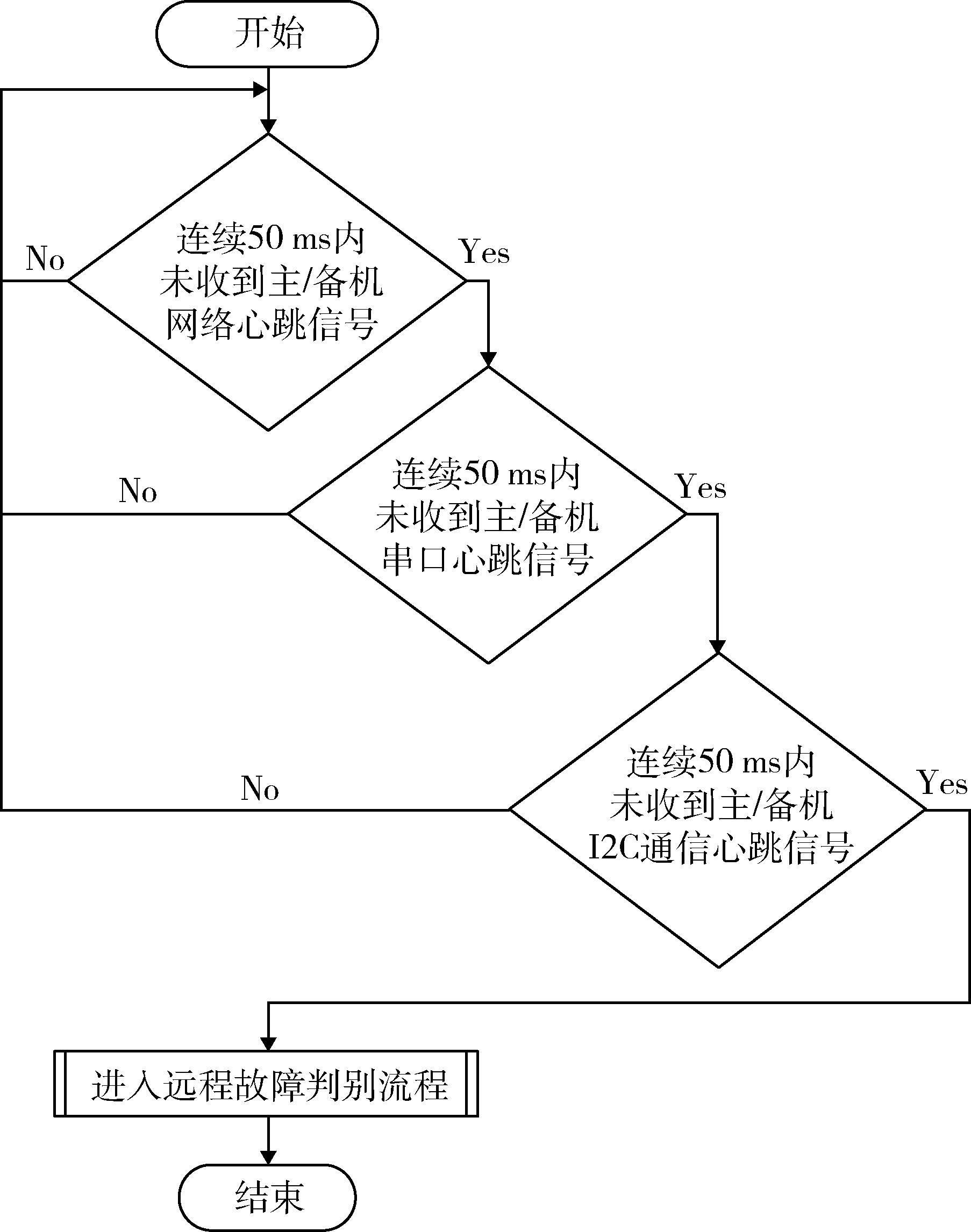
图5 三重心跳检测机制流程图
Fig.5 Flowchart of the triple heartbeat detection mechanism
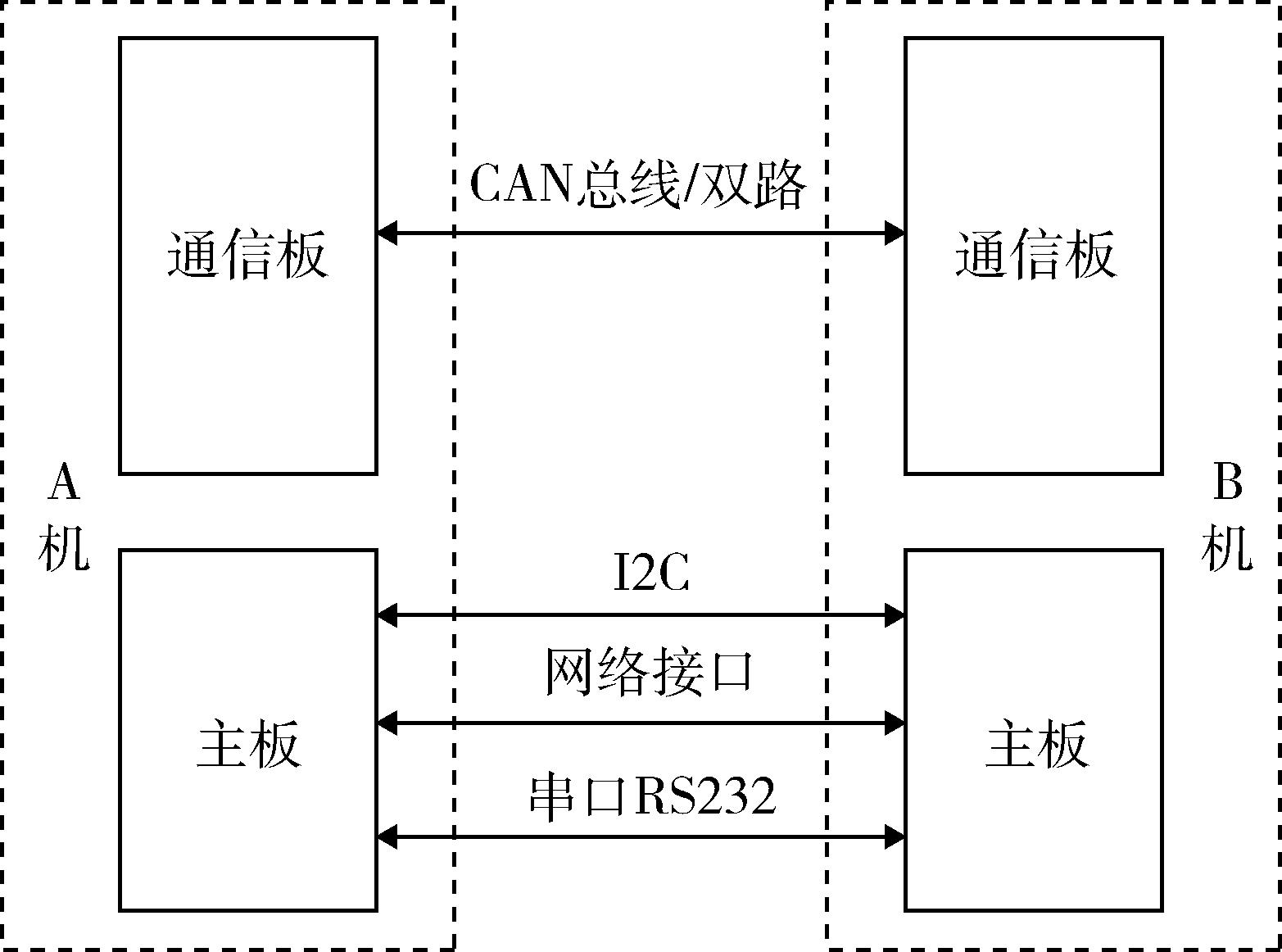
图6 远程判别与心跳监测物理连接示意图
Fig. 6 Schematic diagram of physical connection between remote identification and heartbeat monitoring
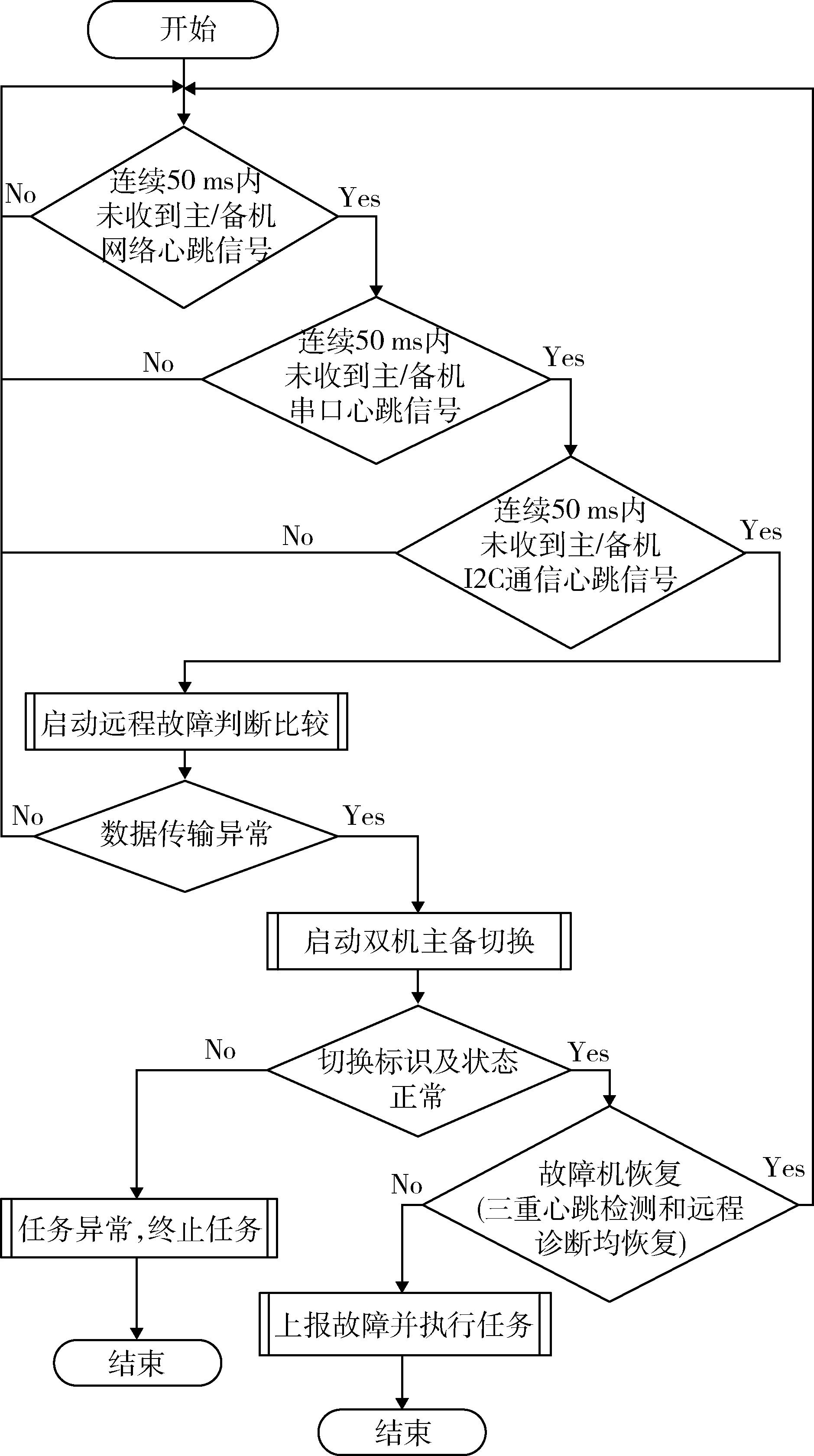
图7 远程判别机制流程图
Fig. 7 Flowchart of remote discriminant mechanism

图8 传统发控数据处理设备可靠性模型
Fig. 8 Reliability model of traditional launch control data processing equipment

图9 双机冗余发控数据处理设备可靠性模型
Fig. 9 Reliability model of dual redundant launch control data processing equipment
| 组件名称 | 预计值 λ×10-6/h | 预计值MTBCF/h |
|---|---|---|
| 汇总 | 50.947 548 | 19 628.029 99 |
| 主板 | 25.145 007 | 39 769 |
| 电源 | 6.4 | 156 250 |
| 通信板 | 2.745 6 | 364 219 |
| 箱体(含VPX底板、连接器) | 7.488 547 | 133 537 |
| 显示模块 | 7.868 394 | 127 090 |
| 键鼠模块 | 1.3 | 769 230 |
表5 传统发控数据处理设备基本可靠性MTBF预计值
Table 5 MTBF estimation of basic reliability of traditional launch control data processing equipment
| 组件名称 | 预计值 λ×10-6/h | 预计值MTBCF/h |
|---|---|---|
| 汇总 | 50.947 548 | 19 628.029 99 |
| 主板 | 25.145 007 | 39 769 |
| 电源 | 6.4 | 156 250 |
| 通信板 | 2.745 6 | 364 219 |
| 箱体(含VPX底板、连接器) | 7.488 547 | 133 537 |
| 显示模块 | 7.868 394 | 127 090 |
| 键鼠模块 | 1.3 | 769 230 |
| 组件名称 | 预计值 λ×10-6/h | 预计值MTBF/h |
|---|---|---|
| 汇总 | 86.938 155 | 11 502 |
| 主板A | 25.145 007 | 39 769 |
| 主板B | 25.145 007 | 39 769 |
| 电源A | 6.4 | 156 250 |
| 电源B | 6.4 | 156 250 |
| 通信板A | 2.745 6 | 364 219 |
| 通信板B | 2.745 6 | 364 219 |
| KVM板 | 1.7 | 588 235 |
| 箱体(含VPX底板、连接器) | 7.488 547 | 133 537 |
| 显示模块 | 7.868 394 | 127 090 |
| 键鼠模块 | 1.3 | 769 230 |
表6 发控数据处理设备基本可靠性MTBF预计值
Table 6 MTBF estimation of basic reliability of launch control data processing equipment
| 组件名称 | 预计值 λ×10-6/h | 预计值MTBF/h |
|---|---|---|
| 汇总 | 86.938 155 | 11 502 |
| 主板A | 25.145 007 | 39 769 |
| 主板B | 25.145 007 | 39 769 |
| 电源A | 6.4 | 156 250 |
| 电源B | 6.4 | 156 250 |
| 通信板A | 2.745 6 | 364 219 |
| 通信板B | 2.745 6 | 364 219 |
| KVM板 | 1.7 | 588 235 |
| 箱体(含VPX底板、连接器) | 7.488 547 | 133 537 |
| 显示模块 | 7.868 394 | 127 090 |
| 键鼠模块 | 1.3 | 769 230 |
| 组件名称 | 预计值 λ×10-6/h | 预计值 MTBF/h |
|---|---|---|
| 合计 | 41.217 345 67 | 24 261.630 24 |
| 主板 | 25.145 007 | 39 769 |
| 电源 | 6.4 | 156 250 |
| CAN/B码 | 2.745 6 | 364 219 |
| KVM板 | 1.7 | 588 235 |
箱体(含VPX底板、 连接器) | 7.488 547 | 133 537 |
| 显示模块 | 7.868 394 | 127 090 |
| 键鼠模块 | 1.3 | 769 230 |
表7 发控数据处理设备任务可靠性MTBCF预计值
Table 7 MTBCF mission reliability estimates for launch control data processing equipment
| 组件名称 | 预计值 λ×10-6/h | 预计值 MTBF/h |
|---|---|---|
| 合计 | 41.217 345 67 | 24 261.630 24 |
| 主板 | 25.145 007 | 39 769 |
| 电源 | 6.4 | 156 250 |
| CAN/B码 | 2.745 6 | 364 219 |
| KVM板 | 1.7 | 588 235 |
箱体(含VPX底板、 连接器) | 7.488 547 | 133 537 |
| 显示模块 | 7.868 394 | 127 090 |
| 键鼠模块 | 1.3 | 769 230 |
| 序号 | 总线响应状况 | 故障模拟方式 |
|---|---|---|
| 1 | 数据接收响应情况分析 | 重复监听总线上数据响应情况,统计总线切换次数和总线响应情况 |
| 2 | 模拟单一总线故障,记录系统数据接收响应情况分析 | 模拟接收故障(响应第2次接收),分析单次切换下系统响应时间 |
| 3 | 模拟两总线切换故障,记录系统数据接收响应情况分析 | 模拟接收故障(响应第3次接收),分析双次切换下系统响应时间 |
| 4 | 模拟两总线跳转3次故障,记录系统数据接收响应情况分析 | 模拟接收故障(响应第4次接收),分析3次切换下系统响应时间 |
表8 冗余总线运行情况分析表
Table 8 Redundant bus operation analysis table
| 序号 | 总线响应状况 | 故障模拟方式 |
|---|---|---|
| 1 | 数据接收响应情况分析 | 重复监听总线上数据响应情况,统计总线切换次数和总线响应情况 |
| 2 | 模拟单一总线故障,记录系统数据接收响应情况分析 | 模拟接收故障(响应第2次接收),分析单次切换下系统响应时间 |
| 3 | 模拟两总线切换故障,记录系统数据接收响应情况分析 | 模拟接收故障(响应第3次接收),分析双次切换下系统响应时间 |
| 4 | 模拟两总线跳转3次故障,记录系统数据接收响应情况分析 | 模拟接收故障(响应第4次接收),分析3次切换下系统响应时间 |
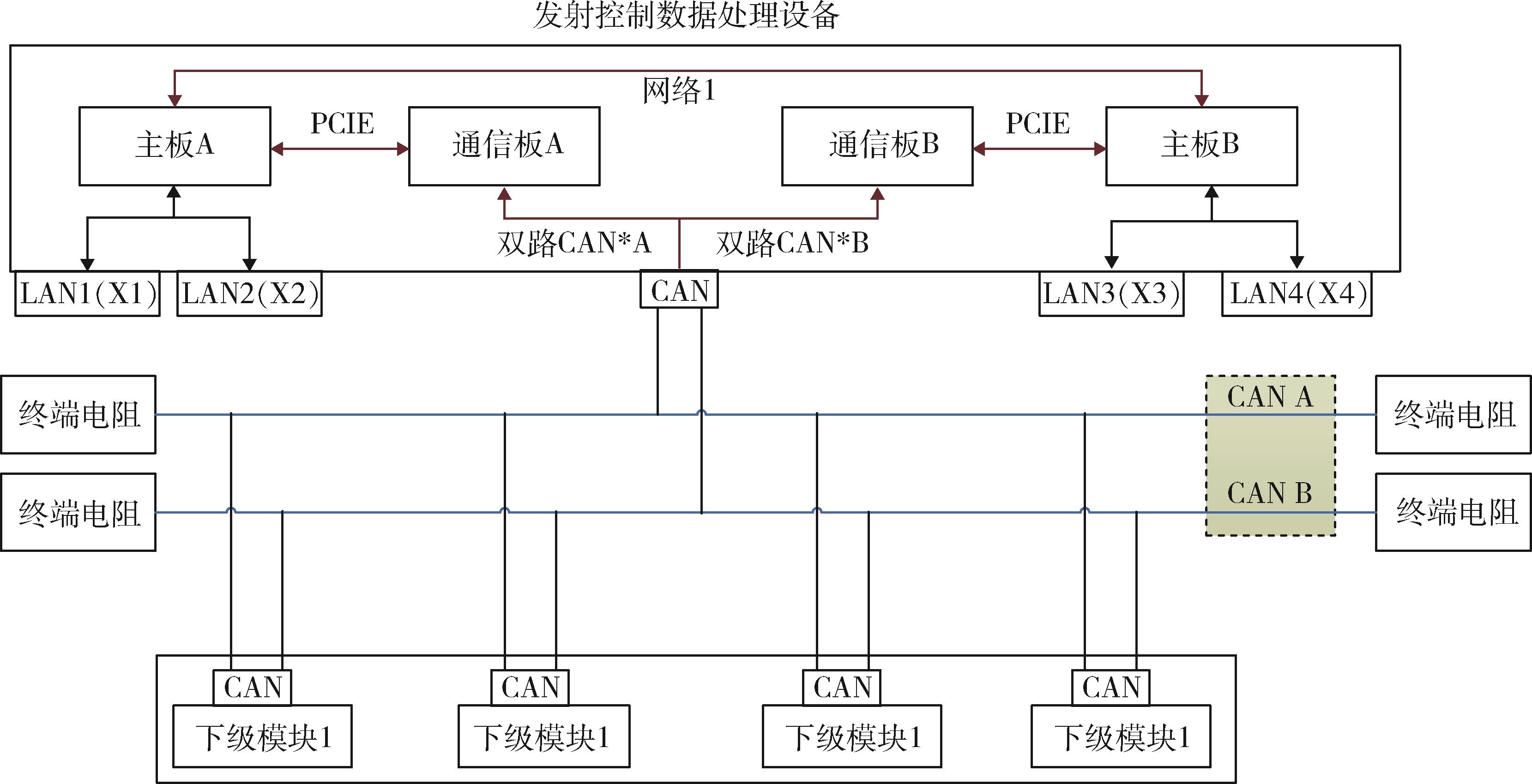
图10 发控数据处理设备测试连接方案
Fig.10 Test connection scheme for launch control data processing equipment
| 统计结果(A总线正常通信) | 电源 | 车控单元 | 方向基准 | 发控 |
|---|---|---|---|---|
| 平均 | 2.801 074 | 1.812 146 | 5.189 189 | 0.788 388 |
| 标准误差 | 0.030 738 | 0.166 37 | 0.094 75 | 0.078 521 |
| 中位数 | 1 | 1 | 5 | 1 |
| 众数 | 1 | 1 | 1 | 1 |
| 标准差 | 3.355 069 | 5.846 664 | 3.310 849 | 2.840 885 |
| 方差 | 11.256 49 | 34.183 48 | 10.961 72 | 8.070 63 |
| 峰度 | -0.310 8 | 119.251 3 | -1.413 95 | 1 234.342 |
| 偏度 | 1.096 996 | 10.304 63 | 0.044 939 | 34.620 39 |
| 区域 | 15 | 91 | 11 | 102 |
| 最小值 | 0 | 0 | 0 | 0 |
| 最大值 | 15 | 88 | 11 | 102 |
| 求和 | 33 372 | 2 238 | 6 336 | 1 032 |
| 观测数 | 11 914 | 1 235 | 1 221 | 1 309 |
| 最大(1) | 15 | 88 | 11 | 102 |
| 最小(1) | 0 | 1 | 0 | 0 |
| 置信度(95.0%) | 0.060 251 | 0.326 399 | 0.185 892 | 0.154 04 |
表 9 发控数据处理设备烤机状态下响应时间分析
Table 9 Response time analysis of launch control data processing equipment in the state of oven
| 统计结果(A总线正常通信) | 电源 | 车控单元 | 方向基准 | 发控 |
|---|---|---|---|---|
| 平均 | 2.801 074 | 1.812 146 | 5.189 189 | 0.788 388 |
| 标准误差 | 0.030 738 | 0.166 37 | 0.094 75 | 0.078 521 |
| 中位数 | 1 | 1 | 5 | 1 |
| 众数 | 1 | 1 | 1 | 1 |
| 标准差 | 3.355 069 | 5.846 664 | 3.310 849 | 2.840 885 |
| 方差 | 11.256 49 | 34.183 48 | 10.961 72 | 8.070 63 |
| 峰度 | -0.310 8 | 119.251 3 | -1.413 95 | 1 234.342 |
| 偏度 | 1.096 996 | 10.304 63 | 0.044 939 | 34.620 39 |
| 区域 | 15 | 91 | 11 | 102 |
| 最小值 | 0 | 0 | 0 | 0 |
| 最大值 | 15 | 88 | 11 | 102 |
| 求和 | 33 372 | 2 238 | 6 336 | 1 032 |
| 观测数 | 11 914 | 1 235 | 1 221 | 1 309 |
| 最大(1) | 15 | 88 | 11 | 102 |
| 最小(1) | 0 | 1 | 0 | 0 |
| 置信度(95.0%) | 0.060 251 | 0.326 399 | 0.185 892 | 0.154 04 |
图11 发控数据处理设备总线响应散点矩阵图
Fig.11 Scatter matrix diagram of the bus response of the launch control data processing device
| Pearson's | 接收 | 单切 | 双切 | 三切 |
|---|---|---|---|---|
| 电源接收 | — | 0.948 83 | 0.947 27 | 0.946 70 |
| 电源单切 | 0.948 83 | — | 0.898 77 | 0.893 03 |
| 电源双切 | 0.947 27 | 0.898 77 | — | 0.889 00 |
| 电源三切 | 0.946 7 | 0.893 03 | 0.889 00 | —- |
| 车显接收 | — | 0.947 86 | 0.945 8 | 0.943 72 |
| 车显单切 | 0.947 86 | — | 0.896 83 | 0.893 59 |
| 车显双切 | 0.945 80 | 0.896 83 | — | 0.883 01 |
| 车显三切 | 0.943 72 | 0.893 59 | 0.883 01 | — |
| 瞄准接收 | — | 0.931 46 | 0.941 05 | 0.899 48 |
| 瞄准单切 | 0.931 46 | — | 0.922 49 | 0.916 14 |
| 瞄准双切 | 0.941 05 | 0.922 49 | — | 0.919 34 |
| 瞄准三切 | 0.899 48 | 0.916 14 | 0.919 34 | — |
| 发控接收 | — | 0.920 03 | 0.930 59 | 0.910 43 |
| 发控单切 | 0.920 03 | — | 0.913 40 | 0.906 80 |
| 发控双切 | 0.930 59 | 0.913 40 | — | 0.905 37 |
| 发控三切 | 0.910 43 | 0.906 80 | 0.905 37 | — |
表10 发控数据处理设备软件模拟故障下响应时间相关性分析
Table 10 Response time correlation analysis under simulated fault of launch control data processing equipment software
| Pearson's | 接收 | 单切 | 双切 | 三切 |
|---|---|---|---|---|
| 电源接收 | — | 0.948 83 | 0.947 27 | 0.946 70 |
| 电源单切 | 0.948 83 | — | 0.898 77 | 0.893 03 |
| 电源双切 | 0.947 27 | 0.898 77 | — | 0.889 00 |
| 电源三切 | 0.946 7 | 0.893 03 | 0.889 00 | —- |
| 车显接收 | — | 0.947 86 | 0.945 8 | 0.943 72 |
| 车显单切 | 0.947 86 | — | 0.896 83 | 0.893 59 |
| 车显双切 | 0.945 80 | 0.896 83 | — | 0.883 01 |
| 车显三切 | 0.943 72 | 0.893 59 | 0.883 01 | — |
| 瞄准接收 | — | 0.931 46 | 0.941 05 | 0.899 48 |
| 瞄准单切 | 0.931 46 | — | 0.922 49 | 0.916 14 |
| 瞄准双切 | 0.941 05 | 0.922 49 | — | 0.919 34 |
| 瞄准三切 | 0.899 48 | 0.916 14 | 0.919 34 | — |
| 发控接收 | — | 0.920 03 | 0.930 59 | 0.910 43 |
| 发控单切 | 0.920 03 | — | 0.913 40 | 0.906 80 |
| 发控双切 | 0.930 59 | 0.913 40 | — | 0.905 37 |
| 发控三切 | 0.910 43 | 0.906 80 | 0.905 37 | — |
| 测试类型 | 测试项目 | 测试方法 | 本方案设备 | 仲裁模块冗余方案 |
|---|---|---|---|---|
| 硬件故障 | 模拟A机故障 | 关闭A机电源 | B机升主,显示A机故障,正常完成任务 | B机升主 |
| 模拟B机故障 | 关闭B机电源 | A机显示B机故障,可保证正常完成测试 | A机显示B机故障 | |
| 模拟心跳故障 | 拔掉网络线 | 单心跳正常状态下可保持切换 | 双主机状态 | |
| 拔掉串口线 | ||||
| 拔掉CAN总线 | ||||
| 模拟转换器故障 | 本设备关闭KVM,另外2个关闭控制盒和仲裁模块 | 切换功能异常,单主机能正常工作 | 切换功能异常,单主机能正常工作 | |
| 软件故障 | A机数据处理软件故障 | 关闭A机数据处理软件 | 正常切换至B机工作 | — |
| A机数据处理软件故障 | 关闭B机数据处理软件 | A机显示B机故障,可保证正常完成测试 | — | |
| 仲裁模块软件故障 | 本方案融入数据处理软件,转换仲裁模块软件异常注入 | 正常运行 | 切换功能异常 |
表 11 发控数据处理设备测试方案及结果
Table 11 Test scheme and results of launch control data processing equipment
| 测试类型 | 测试项目 | 测试方法 | 本方案设备 | 仲裁模块冗余方案 |
|---|---|---|---|---|
| 硬件故障 | 模拟A机故障 | 关闭A机电源 | B机升主,显示A机故障,正常完成任务 | B机升主 |
| 模拟B机故障 | 关闭B机电源 | A机显示B机故障,可保证正常完成测试 | A机显示B机故障 | |
| 模拟心跳故障 | 拔掉网络线 | 单心跳正常状态下可保持切换 | 双主机状态 | |
| 拔掉串口线 | ||||
| 拔掉CAN总线 | ||||
| 模拟转换器故障 | 本设备关闭KVM,另外2个关闭控制盒和仲裁模块 | 切换功能异常,单主机能正常工作 | 切换功能异常,单主机能正常工作 | |
| 软件故障 | A机数据处理软件故障 | 关闭A机数据处理软件 | 正常切换至B机工作 | — |
| A机数据处理软件故障 | 关闭B机数据处理软件 | A机显示B机故障,可保证正常完成测试 | — | |
| 仲裁模块软件故障 | 本方案融入数据处理软件,转换仲裁模块软件异常注入 | 正常运行 | 切换功能异常 |
| [1] | 罗悦, 陶然, 赵明, 等. 双冗余热备份技术的综合控制设备设计与实现[J]. 现代防御技术, 2018, 46(5): 129-134. |
| LUO Yue, TAO Ran, ZHAO Ming, et al. Design and Realization of Synthetic Control Equipment Based on Dual Hot Redundancy Technology[J]. Modern Defence Technology, 2018, 46(5): 129-134. | |
| [2] | 唐碧蔚, 邓颖, 魏少鹏. 基于冗余网络的数据综合处理热备份策略[J]. 航空电子技术, 2021, 52(2): 11-15. |
| TANG Biwei, DENG Ying, WEI Shaopeng. Hot Backup Technology of Data Integrated Processing Based on Redundant Network[J]. Avionics Technology, 2021, 52(2): 11-15. | |
| [3] | 朱涛. 基于双主机的冗余控制系统软件设计与实现[J]. 工业控制计算机, 2019, 32(10): 94-95. |
| ZHU Tao. Design and Implementation of Redundant Control System Software Based on Dual Host[J]. Industrial Control Computer, 2019, 32(10): 94-95. | |
| [4] | 肖芳春, 龙玉湘, 贾昕悦. 基于VxWorks系统的冗余网卡驱动实现[J]. 工业控制计算机, 2023, 36(11): 45-46. |
| XIAO Fangchun, LONG Yuxiang, JIA Xinyue. Realization of Redundancy Network Driver Based on VxWorks System[J]. Industrial Control Computer, 2023, 36(11): 45-46. | |
| [5] | 刘敏, 黄敏思. 基于双冗余CAN总线的同步系统设计[J]. 单片机与嵌入式系统应用, 2023, 23(11): 59-62. |
| LIU Min, HUANG Minsi. Design of Synchronous System Based on Dual-Redundant CAN Bus[J]. Microcontrollers & Embedded Systems, 2023, 23(11): 59-62. | |
| [6] | 谢军, 林晨, 易谋. 一种高可靠性双冗余网络设计实现[J]. 网络安全和信息化, 2023(9): 78-80. |
| XIE Jun, LIN Chen, YI Mou. Design and Implementation of High Reliability Double Redundancy Network[J]. Cybersecurity & Informatization, 2023(9): 78-80. | |
| [7] | 王报华, 徐林丰, 张金刚, 等. 基于时间触发以太网的遥测通信技术[J]. 导弹与航天运载技术(中英文), 2023(4): 118-122. |
| WANG Baohua, XU Linfeng, ZHANG Jingang, et al. Telemetry Communication Technology Based on Time Triggered Ethernet[J]. Missiles and Space Vehicles, 2023(4): 118-122. | |
| [8] | 洪泽, 张铆, 陈振娇. 基于STM32F407的Ethernet-CAN总线转换器设计[J]. 电子设计工程, 2023, 31(14): 46-50. |
| HONG Ze, ZHANG Mao, CHEN Zhenjiao. Design of Ethernet-CAN Bus Converter Based on STM32F407[J]. Electronic Design Engineering, 2023, 31(14): 46-50. | |
| [9] | 赵鋆, 徐长明, 夏国强, 等. 一种适用于巨型水电站的新型控制器CPU冗余结构[J]. 水电与新能源, 2023, 37(6): 71-74. |
| ZHAO Jun, XU Changming, XIA Guoqiang, et al. A Nwe Redundant Structure for Controller CPU Suitable for Giant Hydropower Stations[J]. Hydropower and Nwe Energy, 2023, 37(6): 71-74. | |
| [10] | 席刚刚, 解友华, 曾晓松, 等. 一种基于双冗余EPS系统的单独刷新实现方案[J]. 农业装备与车辆工程, 2023, 61(8): 73-76. |
| XI Ganggang, XIE Youhua, ZENG Xiaosong, et al. An Independent Flashing Solution for Dual EPS Systems[J]. Agricultural Equipment & Vehicle Engineering, 2023, 61(8): 73-76. | |
| [11] | 倪智煜, 李新亮, 魏士皓. 基于B/S架构的飞机功能试验数据链测试系统研究[J]. 自动化与仪表, 2023, 38(5): 28-31. |
| NI Zhiyu, LI Xinliang, WEI Shihao. Research of Aircraft Function Test Data Link System Based on B/S Framework[J]. Automation & Instrumentation, 2023, 38(5): 28-31. | |
| [12] | 翟耘萱, 田园, 史翠红, 等. 航天器嵌入式软件CAN总线测试方法研究[J]. 机电信息, 2023(9): 5-7, 11. |
| ZHAI Yunxuan, TIAN Yuan, SHI Cuihong, et al. Research on CAN Bus Test Method of Spacecraft Embedded Software[J]. Mechanical and Electrical Information, 2023(9): 5-7, 11. | |
| [13] | 马宜东. 基于双冗余核心网络升级的探讨[J]. 网络安全和信息化, 2023(5): 77-79. |
| MA Yidong. Discussion on Upgrading Dual-Redundancy Core Network[J]. Cybersecurity & Informatization, 2023(5): 77-79. | |
| [14] | 范毅, 王一兵, 袁继荷. 基于VPX架构的视频采集设备的设计与实现[J]. 科技风, 2023(10): 4-6. |
| FAN Yi, WANG Yibing, YUAN Jihe. Design and Implementation of Video Capture Equipment Based on VPX Architecture[J]. Technology Wind, 2023(10): 4-6. | |
| [15] | 王报华, 郝现伟, 王昕, 等. FC-AE-1553光纤总线技术在运载火箭测量系统的应用[J]. 导弹与航天运载技术(中英文), 2023(2): 137-140. |
| WANG Baohua, HAO Xianwei, WANG Xin, et al. Application of FC-AE-1553 Optical Fiber Bus Technology in Launch Vehicle Measurement[J]. Missiles and Space Vehicles, 2023(2): 137-140. | |
| [16] | 苏醒, 许晋荣, 许晓东, 等. 一种基于总线型的安全通信协议研究[J]. 自动化与仪表, 2023, 38(3): 11-13, 18. |
| SU Xing, XU Jinrong, XU Xiaodong, et al. Research on a Security Communication Protocol Based on Bus[J]. Automation & Instrumentation, 2023, 38(3): 11-13, 18. | |
| [17] | 赵喆, 张会新, 李晓宇, 等. 基于FPGA+DSP的光纤数据传输电路设计[J]. 现代电子技术, 2023, 46(6): 16-22. |
| ZHAO Zhe, ZHANG Huixin, LI Xiaoyu, et al. Design of Optical Fiber Data Transmission Circuit Based on FPGA+DSP[J]. Modern Electronics Technique, 2023, 46(6): 16-22. | |
| [18] | 陈世淼, 王绍山, 程凌峰, 等. 基于μC/OS-II的通用星务软件框架设计[J]. 电子设计工程, 2023, 31(3): 49-53. |
| CHEN Shimiao, WANG Shaoshan, CHENG Lingfeng, et al. Design of General Satellite Software Framework Based on μC/OS-Ⅱ[J]. Electronic Design Engineering, 2023, 31(3): 49-53. | |
| [19] | 王刚毅, 石磊, 范松伟. 基于CS31总线的双冗余船舶电力推进控制系统设计[J]. 船舶工程, 2018(增1): 182-185. |
| WANG Gangyi, SHI Lei, FAN Songwei. Design of Dual-Redundancy Marine Electric Propulsion Control System Based on CS31 Bus[J]. Ship Engineering, 2018(S1): 182-185. | |
| [20] | 雷金奎, 原丹丹, 李海生. 基于ARM的双冗余微小型无人机飞行控制系统的设计[J]. 电子设计工程, 2016(1): 162-164, 168. |
| LEI Jinkui, YUAN Dandan, LI Haisheng. Dual Redundant Flight Control System Design for Small UAV Based on ARM[J]. Electronic Design Engineering, 2016(1): 162-164, 168. | |
| [21] | 何晔, 袁浩智, 彭冬良, 等. 热备双冗余逻辑控制单元冗余、安全导向及可靠性分析[J]. 技术与市场, 2020, 27(11): 9-13. |
| HE Ye, YUAN Haozhi, PENG Dongliang, et al. Redundancy, Safety Orientation and Reliability Analysis of Dual Redundant Logic Control Unit for Hot Backup[J]. Technology and Market, 2020, 27(11): 9-13. | |
| [22] | 陈玉坤, 张声艳, 刘冬, 等. 双模冗余器载计算机设计与实现[J]. 计算机测量与控制, 2016, 24(12): 130-132. |
| CHEN Yukun, ZHANG Shengyan, LIU Dong, et al. Design and Implementation of Dual Redundant Space On-Board Computer System[J]. Computer Measurement & Control, 2016, 24(12): 130-132. | |
| [23] | 张彬, 李常辉, 潘雷. 一种安全型独立主备切换设备及方法[J]. 电子世界, 2018(12): 16-17, 20. |
| ZHANG Bin, LI Changhui, PAN Lei. A Safe Independent Active/Standby Switching Device and Its Method[J]. Electronics World, 2018(12): 16-17, 20. |
| [1] | 孙韬, 王俊达, 王睦深, 孟春考, 祝月. 集群式侦察探测防御系统[J]. 现代防御技术, 2020, 48(3): 92-98. |
| [2] | 安然, 罗小成, 冯剑锋, 李惠媛, 张国栋. 基于1553B的卫星通用测试平台的设计与实现[J]. 现代防御技术, 2020, 48(2): 81-88. |
| [3] | 罗悦, 陶然, 赵明, 李正天. 双冗余热备份技术的综合控制设备设计与实现[J]. 现代防御技术, 2018, 46(5): 129-134. |
| [4] | 程鹏, 罗悦, 郝金凤, 郭袆. 分级管理的通用卫星综合测试系统设计[J]. 现代防御技术, 2018, 46(4): 153-162. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
