

现代防御技术 ›› 2025, Vol. 53 ›› Issue (6): 134-148.DOI: 10.3969/j.issn.1009-086x.2025.06.014
• 目标特性与探测跟踪技术 • 上一篇
收稿日期:2024-09-15
修回日期:2024-11-04
出版日期:2025-12-28
发布日期:2025-12-31
作者简介:黄权印(1999-),男,陕西咸阳人。硕士生,研究方向为机动目标跟踪。
基金资助:Quanyin HUANG, Yichao CAI, Hao LI, Weihua WU, Chenyang WANG
Received:2024-09-15
Revised:2024-11-04
Online:2025-12-28
Published:2025-12-31
摘要:
针对传统算法对高机动目标精准建模难、普适性差的问题,提出了一种基于门控循环单元(gated recurrent unit, GRU)预测的改进无迹卡尔曼滤波(unscented kalman filter, UKF)普适目标跟踪算法。将自注意力机制引入到传统GRU模型中,使得模型能够更好地从历史观测数据中挖掘出目标的运动学方程,解决人工难以对机动目标运动精准建模问题;将学到的模型应用到UKF算法中,实现对目标的跟踪。仿真实验表明,相比于传统GRU模型以及UKF、交互多模型(interacting multiple model, IMM)等经典算法,所提算法具有更好的跟踪精度以及适应性。
中图分类号:
黄权印, 蔡益朝, 李浩, 吴卫华, 王辰洋. 基于GRU预测的改进UKF普适目标跟踪算法[J]. 现代防御技术, 2025, 53(6): 134-148.
Quanyin HUANG, Yichao CAI, Hao LI, Weihua WU, Chenyang WANG. Improved UKF Universal Target Tracking Algorithm Based on GRU Prediction[J]. Modern Defense Technology, 2025, 53(6): 134-148.
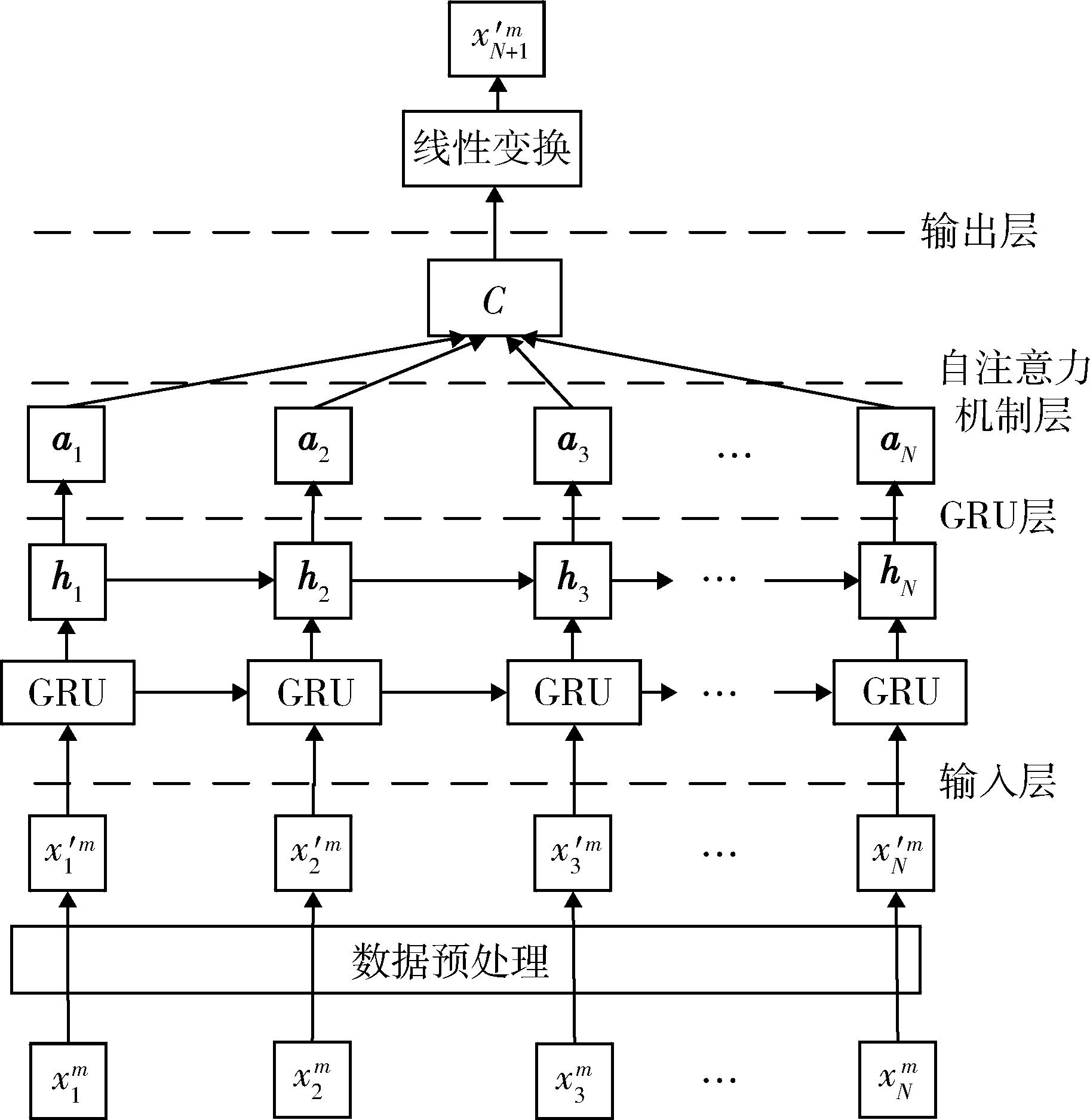
图1 基于改进的GRU模型结构图
Fig. 1 Structure diagram of the improved GRU model
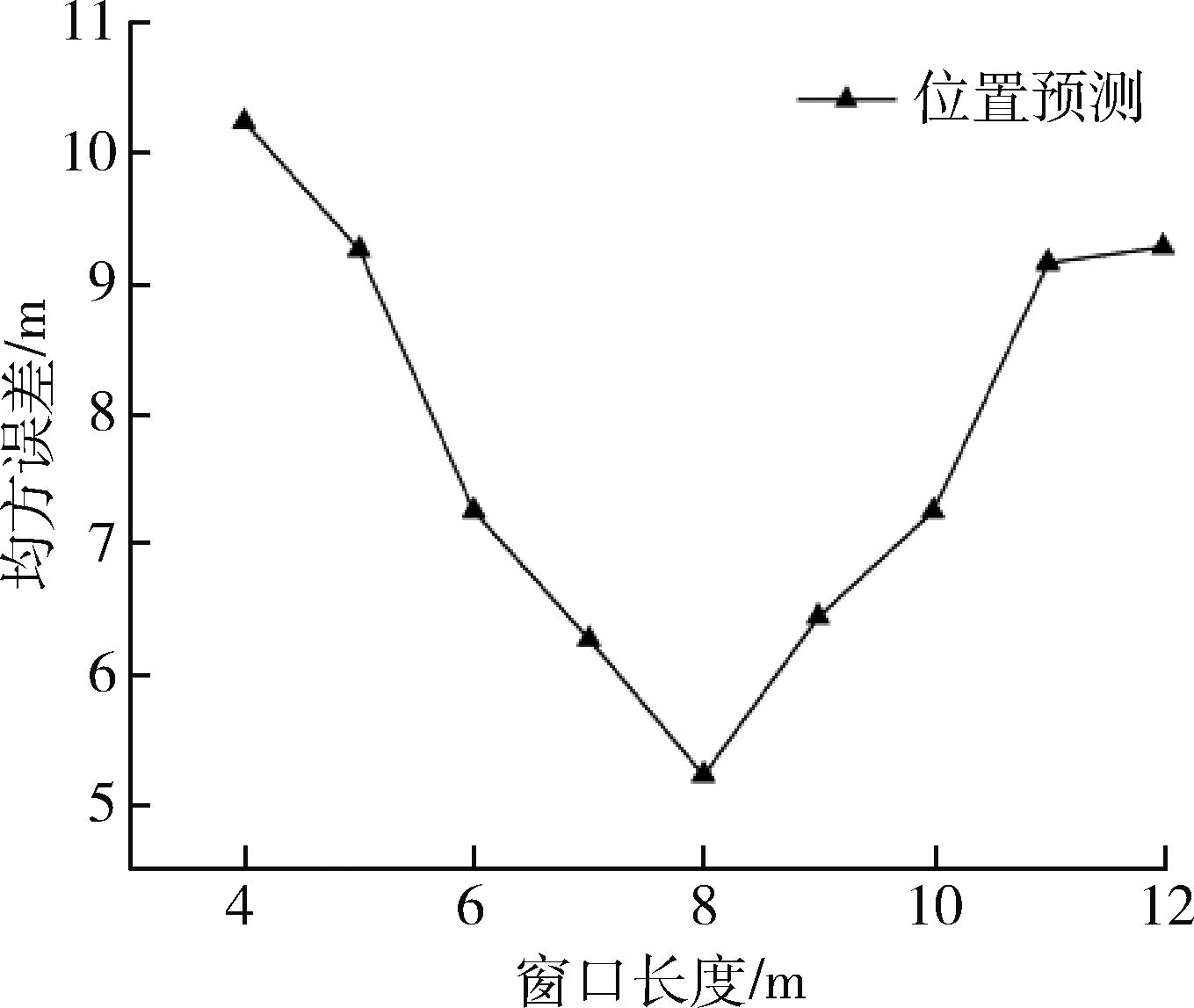
图2 窗口长度对位置预测性能的影响
Fig. 2 Effect of window length on position prediction performance
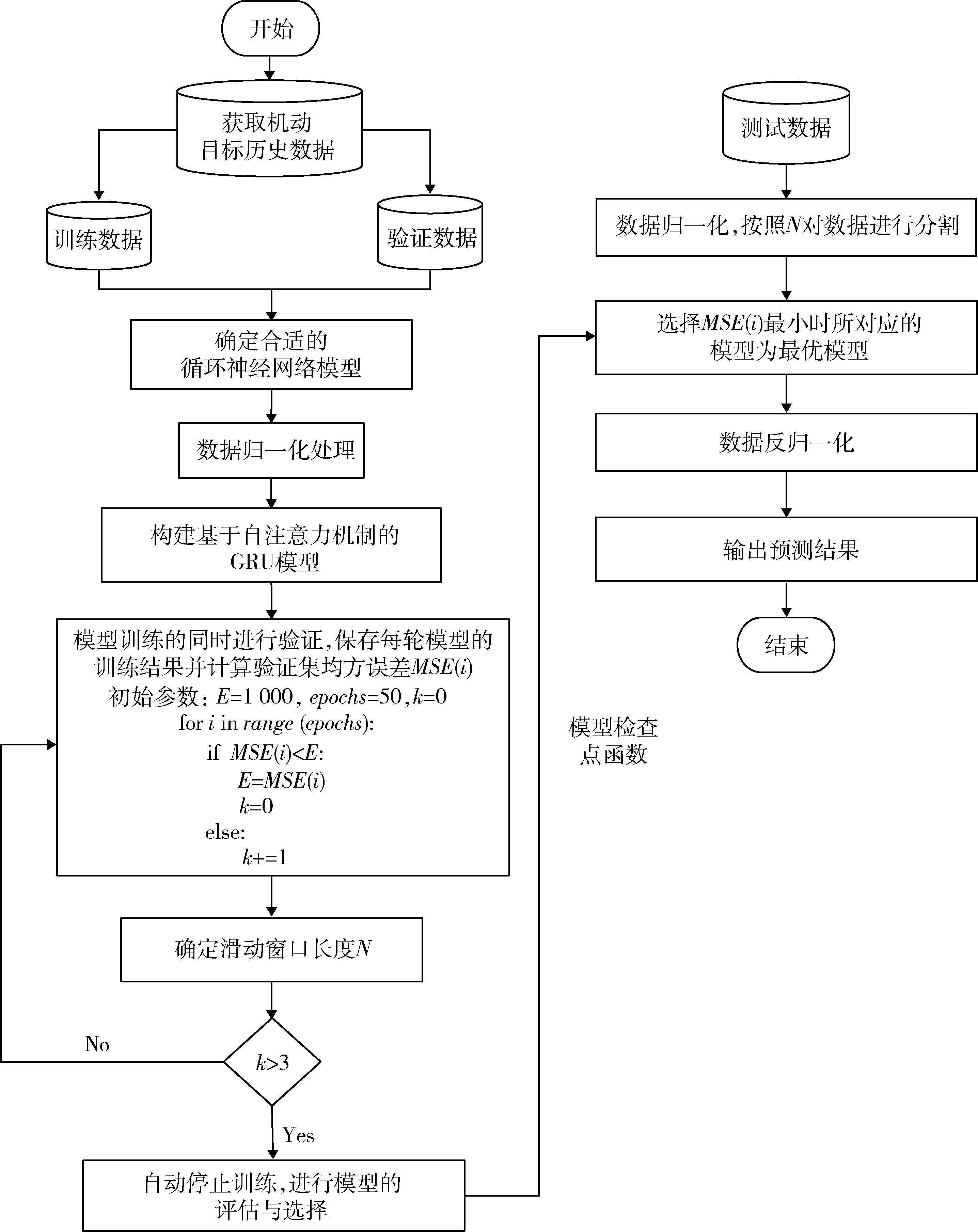
图3 GRU模型训练流程图
Fig. 3 GRU model training flow chart
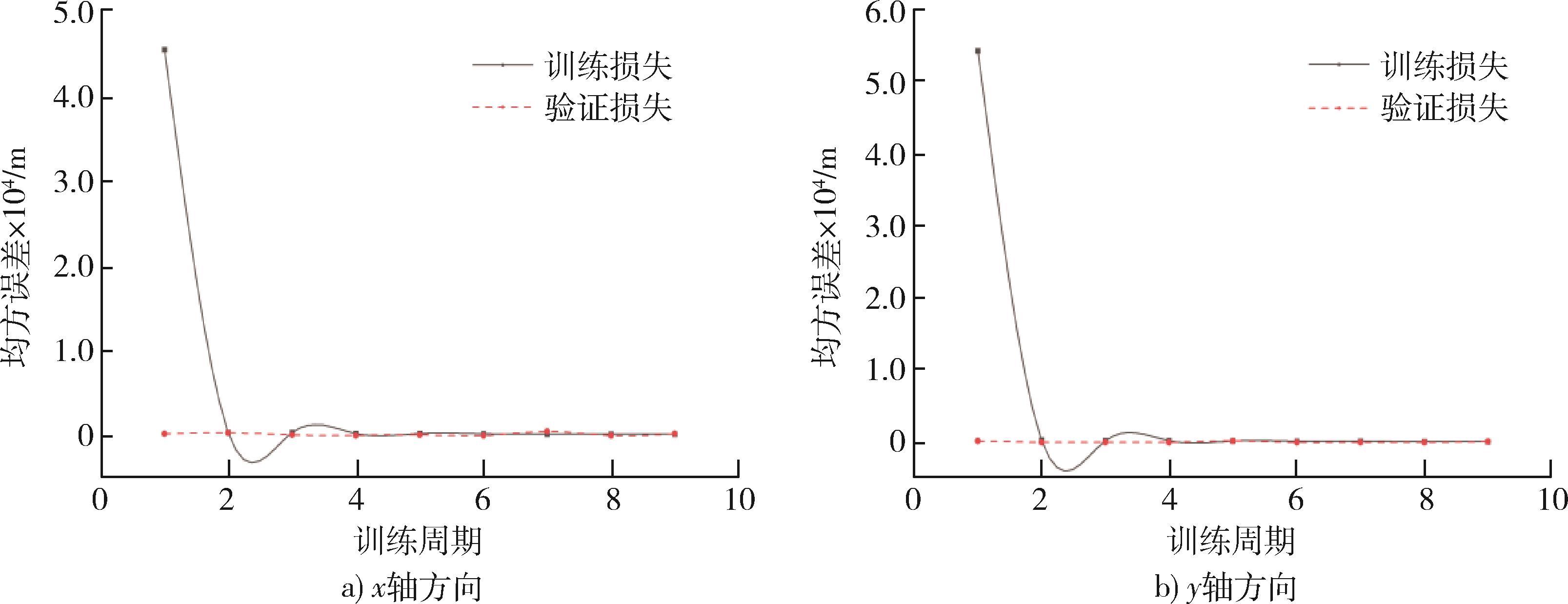
图4 不同方向训练误差曲线
Fig. 4 Error curves for training in different directions
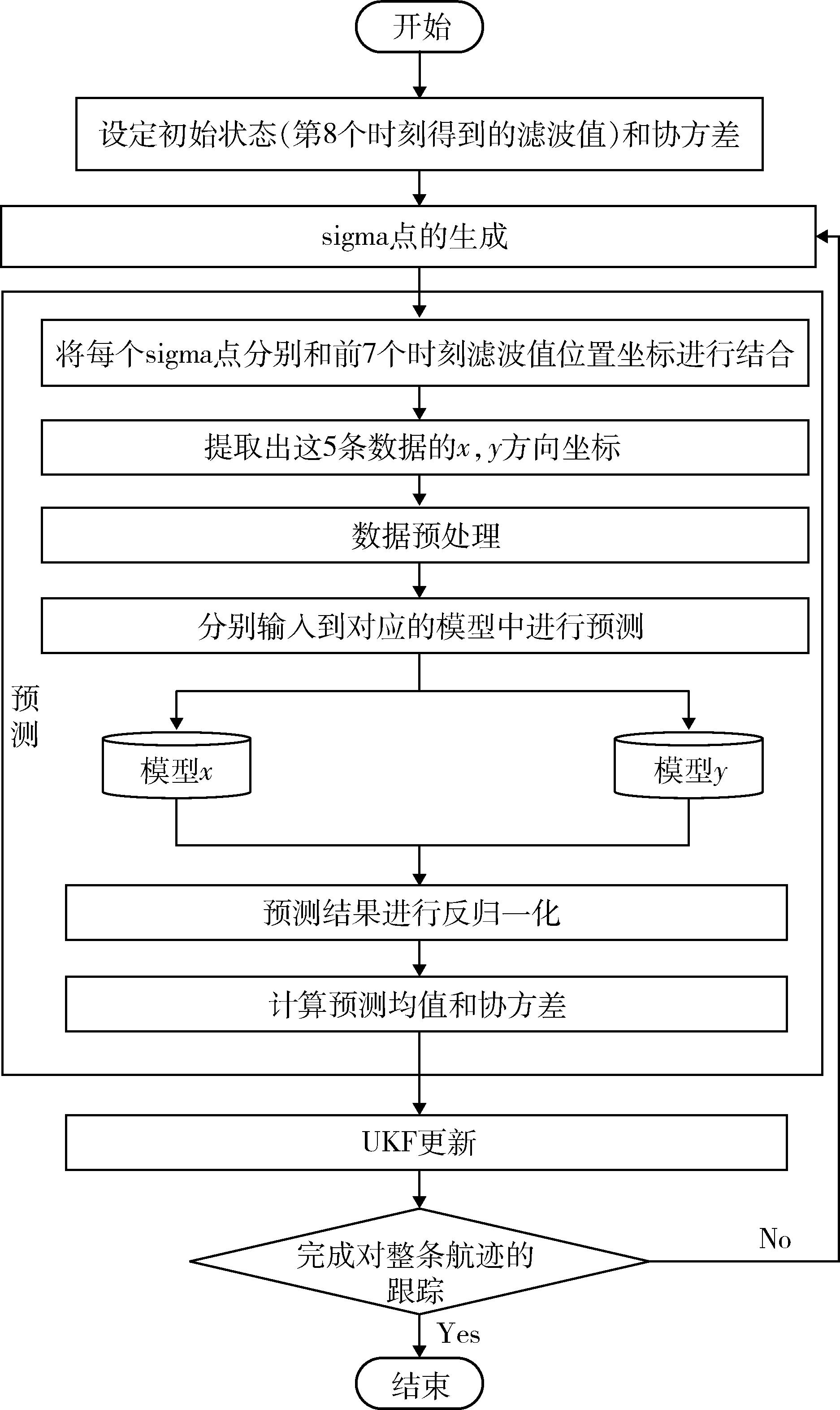
图5 GRU预测的改进UKF算法整体流程
Fig. 5 Whole process of the improved UKF algorithm based on GRU prediction
| 参数 | 数值 |
|---|---|
| 采样间隔/s | 1 |
| 采样点个数 | 60 |
| 初始位置/m | (rand(1 000,1 500),rand(1 500,2 000)) |
| 初始速度/(m·s-1) | (rand(80,100),rand(60,80)) |
| 加速度/(m·s-2) | (rand(-10,10),rand(-10,10)) |
| 转弯率/((°)·s-1) | rand(-10,10) |
| 训练集航迹数量 | 1 200 |
| 验证集航迹数量 | 150 |
| 测试集航迹数量 | 150 |
表1 航迹生成规则
Table 1 Track generation rules
| 参数 | 数值 |
|---|---|
| 采样间隔/s | 1 |
| 采样点个数 | 60 |
| 初始位置/m | (rand(1 000,1 500),rand(1 500,2 000)) |
| 初始速度/(m·s-1) | (rand(80,100),rand(60,80)) |
| 加速度/(m·s-2) | (rand(-10,10),rand(-10,10)) |
| 转弯率/((°)·s-1) | rand(-10,10) |
| 训练集航迹数量 | 1 200 |
| 验证集航迹数量 | 150 |
| 测试集航迹数量 | 150 |
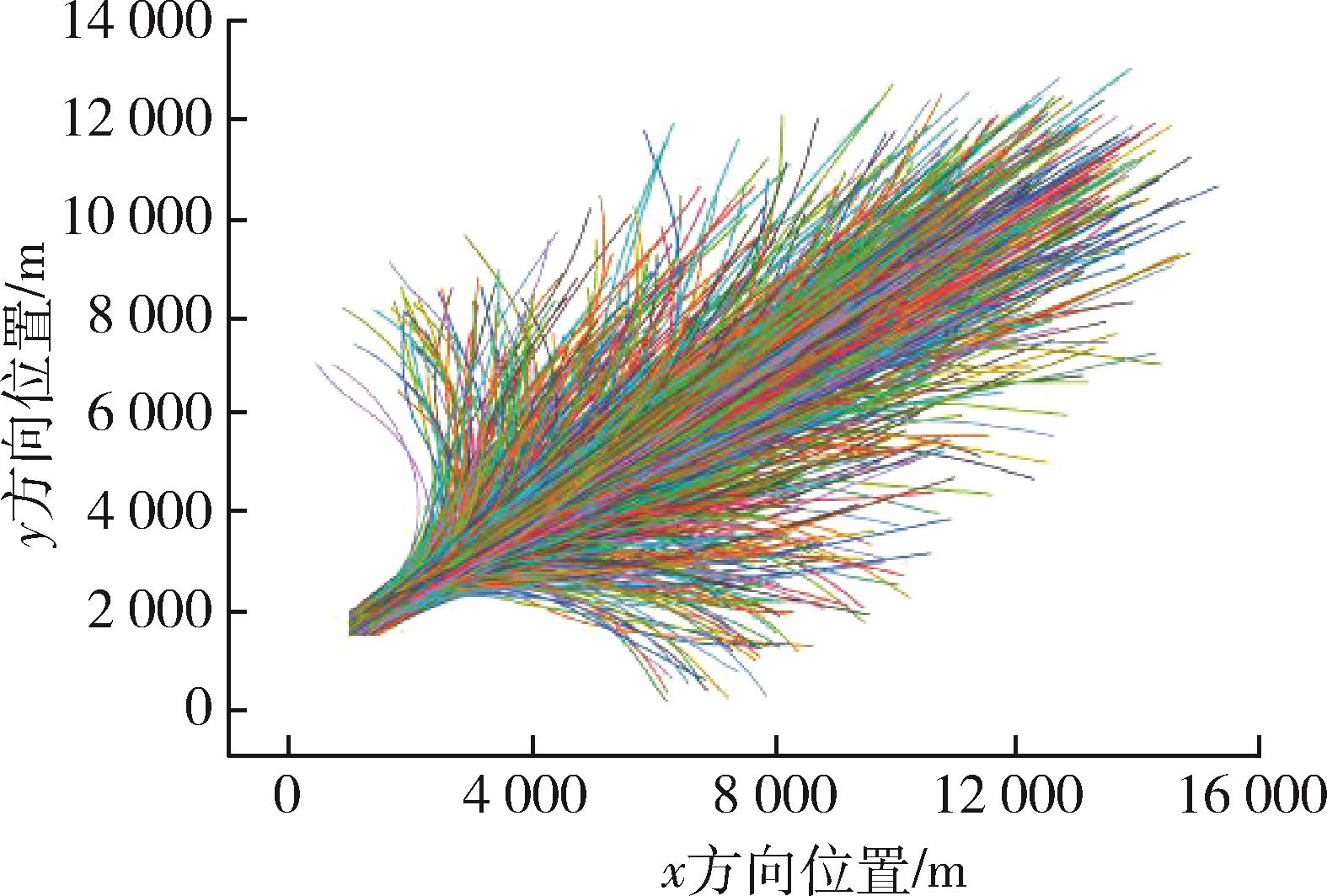
图6 训练集航迹
Fig. 6 Training set track
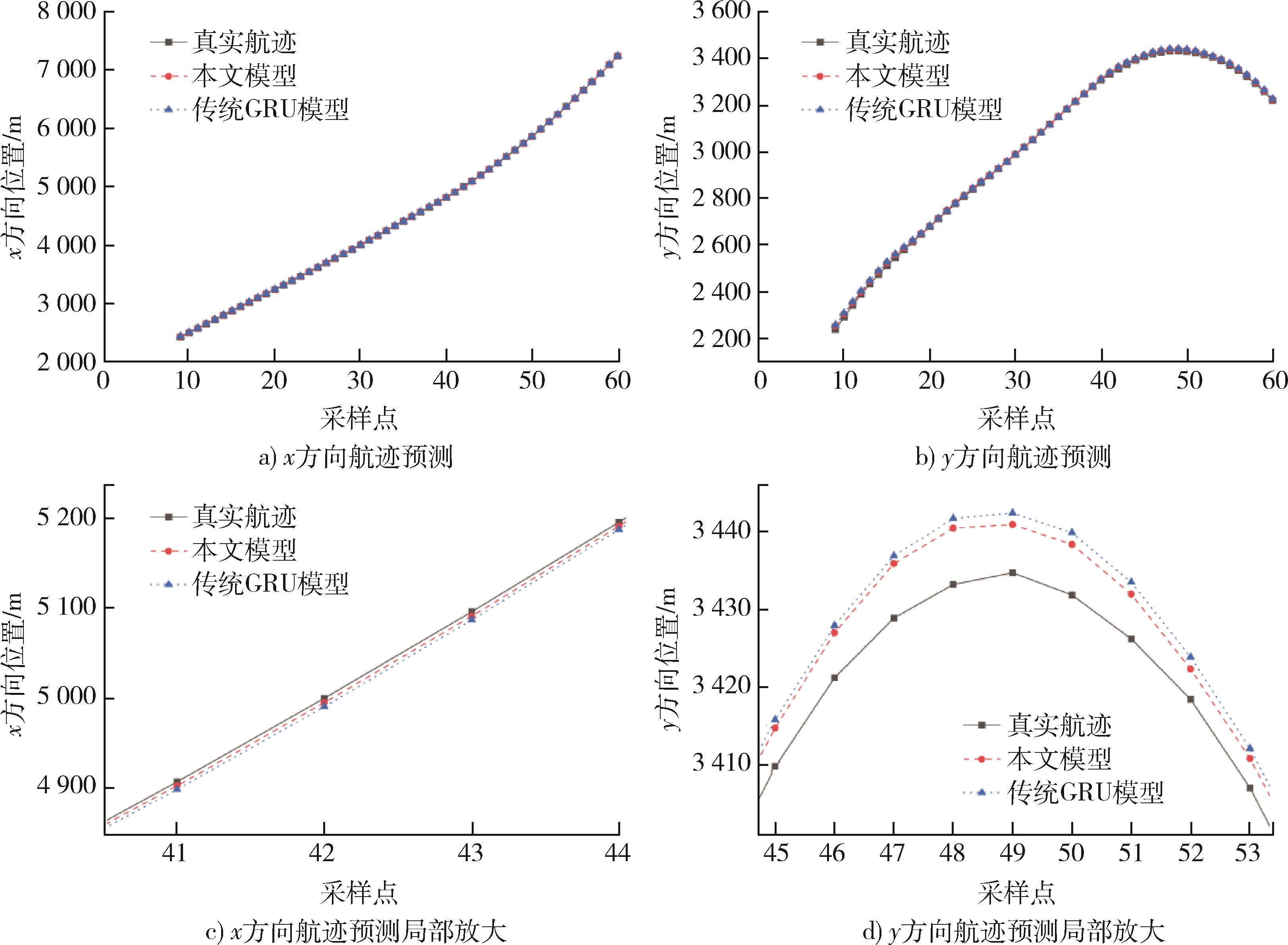
图7 不同方向航迹预测对比
Fig. 7 Comparison of track prediction in different directions
| 预测方法 | 训练耗时/ s | 预测耗时/ s |
|---|---|---|
| GRU模型 | 1 508.47 | 0.064 |
| 本文模型 | 1 703.15 | 0.075 |
表2 训练与预测运行时间
Table 2 Training and prediction running time
| 预测方法 | 训练耗时/ s | 预测耗时/ s |
|---|---|---|
| GRU模型 | 1 508.47 | 0.064 |
| 本文模型 | 1 703.15 | 0.075 |
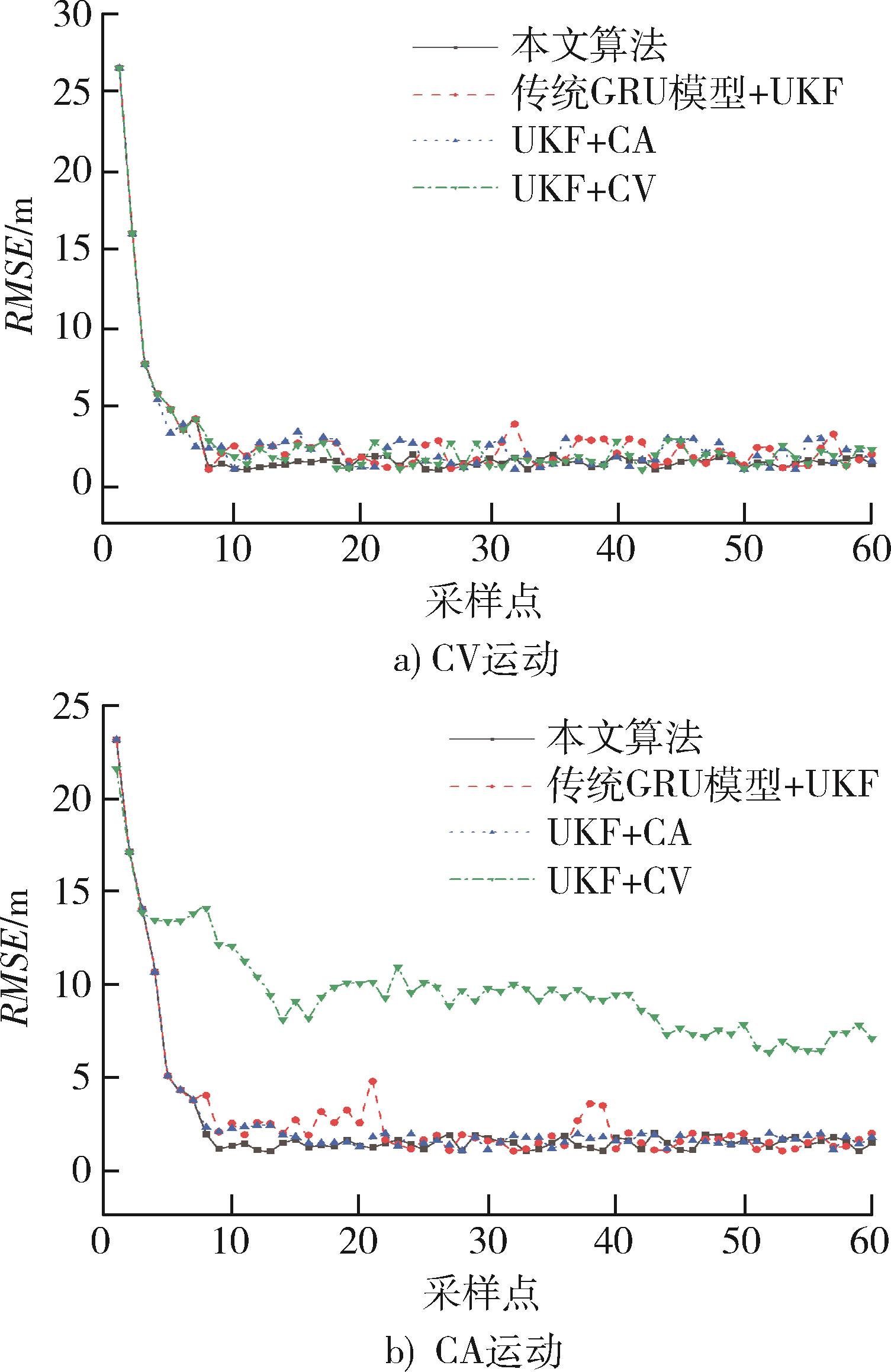
图8 4种算法跟踪RMSE对比
Fig. 8 Tracking RMSE comparison among four algorithms
| 算法 | 运行 时间/s | CV运动平均 RMSE/m | CA运动平均 RMSE/m |
|---|---|---|---|
| 本文算法 | 0.081 | 2.435 3 | 2.571 2 |
| 传统GRU模型+UKF | 0.077 | 2.918 3 | 2.986 0 |
| UKF+CA | 0.068 | 2.856 7 | 2.770 2 |
| UKF+CV | 0.059 | 2.770 4 | 9.657 6 |
表3 运行时间与整条航迹平均RMSE记录
Table 3 Running time and record of average RMSE for the entire track
| 算法 | 运行 时间/s | CV运动平均 RMSE/m | CA运动平均 RMSE/m |
|---|---|---|---|
| 本文算法 | 0.081 | 2.435 3 | 2.571 2 |
| 传统GRU模型+UKF | 0.077 | 2.918 3 | 2.986 0 |
| UKF+CA | 0.068 | 2.856 7 | 2.770 2 |
| UKF+CV | 0.059 | 2.770 4 | 9.657 6 |
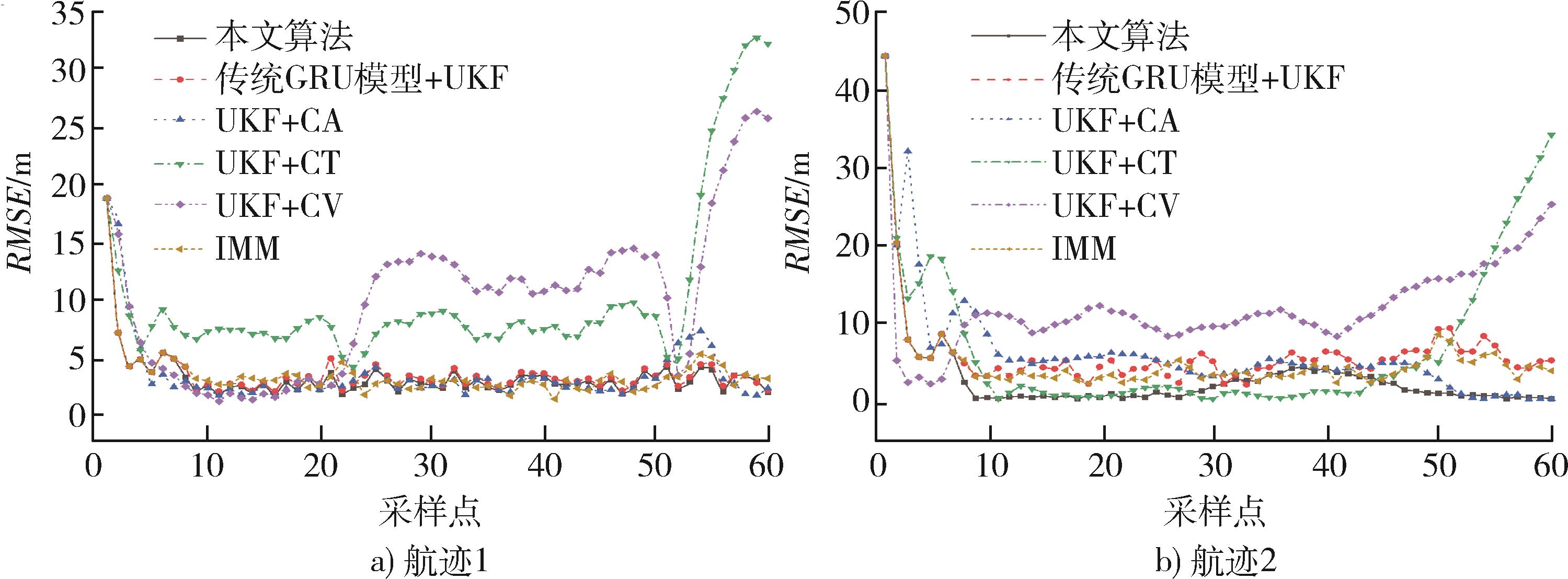
图9 6种算法跟踪RMSE对比
Fig. 9 Tracking RMSE comparison among 6 algorithms
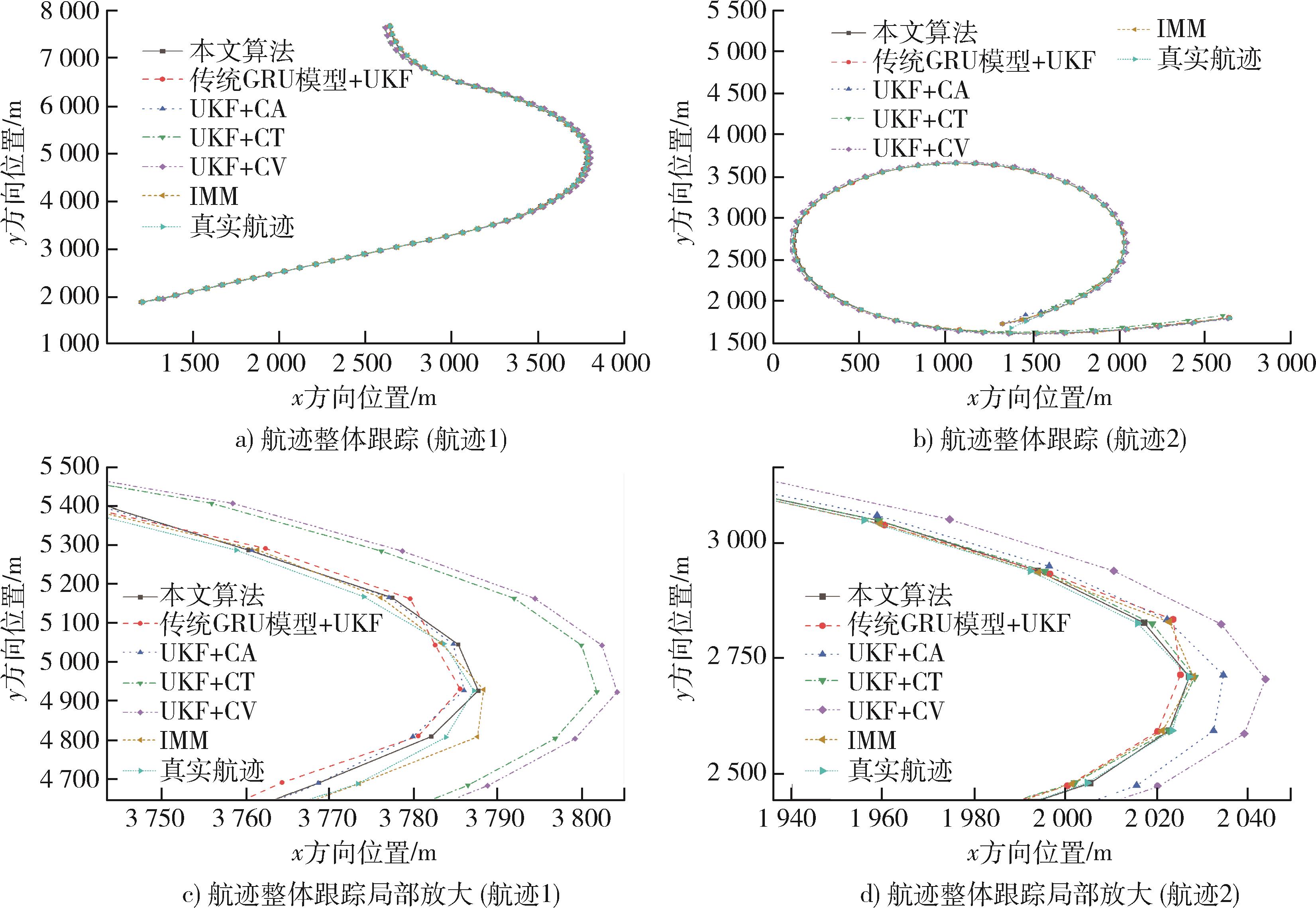
图10 6种算法航迹跟踪对比
Fig. 10 Comparison of trajectory tracking among 6 algorithms
| 算法 | 运行 时间/s | 航迹1平均 RMSE/m | 航迹2平均 RMSE/m |
|---|---|---|---|
| 本文算法 | 0.085 | 3.111 8 | 3.298 8 |
| 传统GRU模型+UKF | 0.079 | 3.383 1 | 3.994 8 |
| UKF+CA | 0.072 | 3.384 5 | 5.946 2 |
| UKF+CT | 0.065 | 10.155 1 | 7.483 0 |
| UKF+CV | 0.061 | 10.017 1 | 12.305 2 |
| IMM | 0.175 | 3.309 3 | 3.978 4 |
表4 运行时间与整条航迹平均RMSE记录
Table 4 Running time and record of average RMSE for the entire track
| 算法 | 运行 时间/s | 航迹1平均 RMSE/m | 航迹2平均 RMSE/m |
|---|---|---|---|
| 本文算法 | 0.085 | 3.111 8 | 3.298 8 |
| 传统GRU模型+UKF | 0.079 | 3.383 1 | 3.994 8 |
| UKF+CA | 0.072 | 3.384 5 | 5.946 2 |
| UKF+CT | 0.065 | 10.155 1 | 7.483 0 |
| UKF+CV | 0.061 | 10.017 1 | 12.305 2 |
| IMM | 0.175 | 3.309 3 | 3.978 4 |
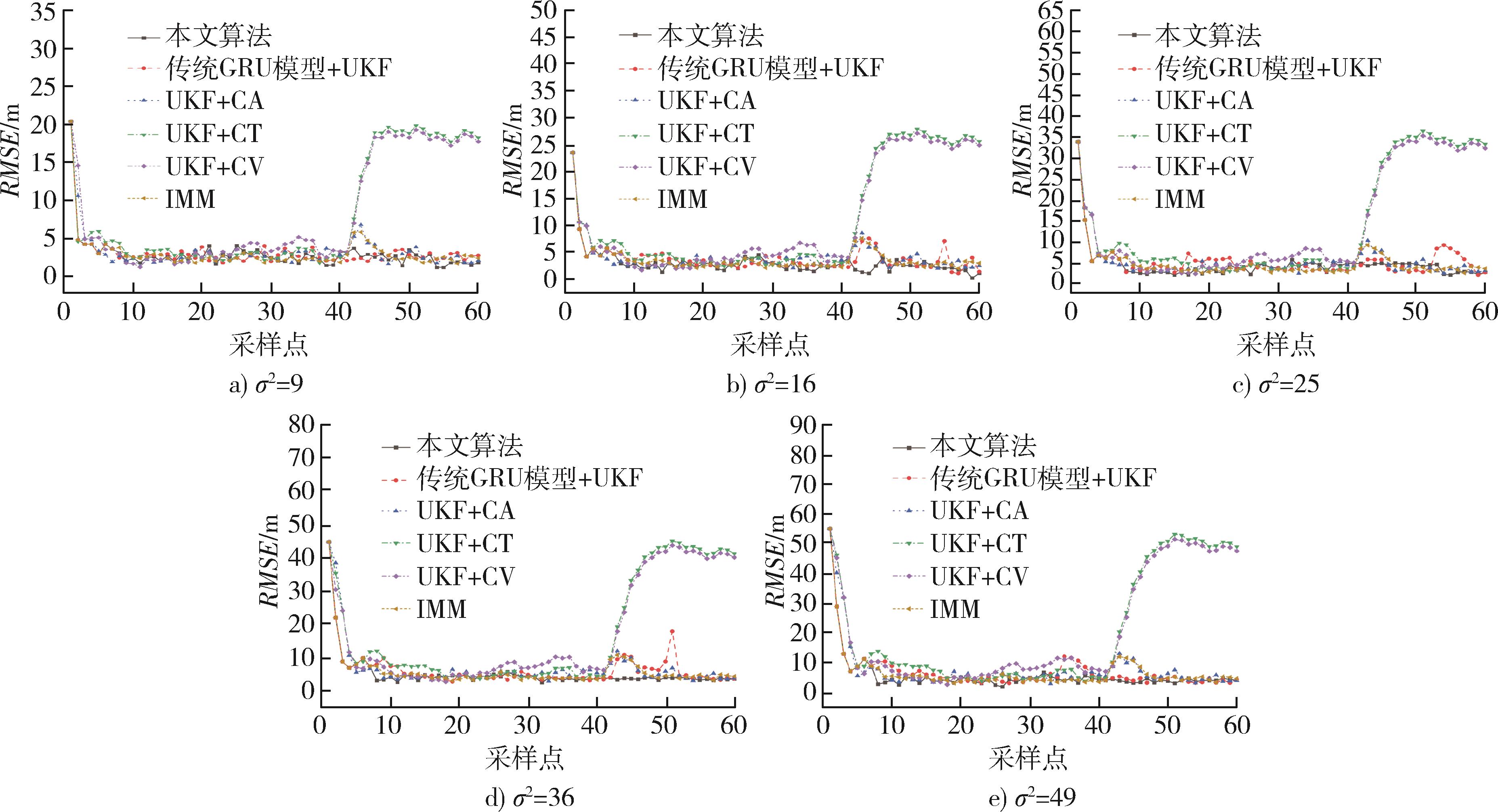
图11 不同噪声条件下6种算法跟踪RMSE对比
Fig. 11 Tracking RMSE comparison among 6 algorithms under different noise conditions
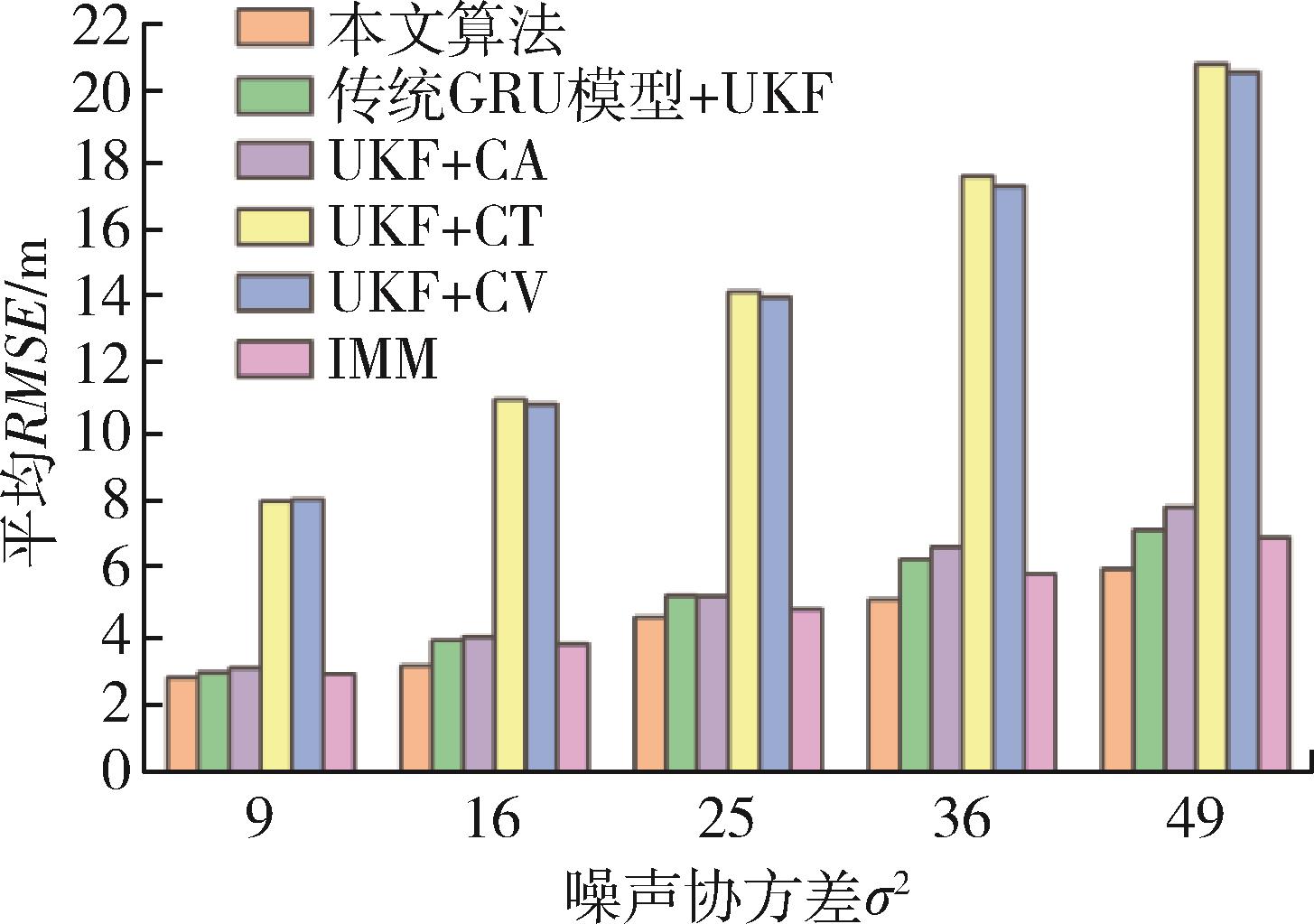
图12 不同噪声条件下整条航迹平均RMSE
Fig. 12 Average RMSE of the entire track under different noise conditions
| [1] | 彭华甫, 黄高明, 田威, 等. 标签多伯努利机动目标跟踪与分类算法[J]. 西安交通大学学报, 2019, 53(2): 157-162, 178. |
| PENG Huafu, HUANG Gaoming, TIAN Wei, et al. A Tracking and Classification Algorithm for Maneuvering Targets with Labeled Multi-Bernoulli[J]. Journal of Xi'an Jiaotong University, 2019, 53(2): 157-162, 178. | |
| [2] | 陆光宇. 目标跟踪技术研究[J]. 舰船电子工程, 2018, 38(12): 6-10. |
| LU Guangyu. An Overview of Target Tracking Technology[J]. Ship Electronic Engineering, 2018, 38(12): 6-10. | |
| [3] | KUMAR M, MONDAL S. Recent Developments on Target Tracking Problems: A Review[J]. Ocean Engineering, 2021, 236: 109558. |
| [4] | 王江. 基于深度神经网络的目标轨迹预测[D]. 太原: 中北大学, 2023. |
| WANG Jiang. Target Trajectory Prediction Based on Deep Neural Network[D]. Taiyuan: North University of China, 2023. | |
| [5] | ZHANG Junbiao, XIONG Jiajun, LI Lingzhi, et al. Motion State Recognition and Trajectory Prediction of Hypersonic Glide Vehicle Based on Deep Learning[J]. IEEE Access, 2022, 10: 21095-21108. |
| [6] | 张宏鹏, 黄长强, 唐上钦, 等. 基于卷积神经网络的无人作战飞机飞行轨迹实时预测[J]. 兵工学报, 2020, 41(9): 1894-1903. |
| ZHANG Hongpeng, HUANG Changqiang, TANG Shangqin, et al. CNN-Based Real-Time Prediction Method of Flight Trajectory of Unmanned Combat Aerial Vehicle[J]. Acta Armamentarii, 2020, 41(9): 1894-1903. | |
| [7] | SHI Zhiyuan, XU Min, PAN Quan. 4-D Flight Trajectory Prediction with Constrained LSTM Network[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(11): 7242-7255. |
| [8] | 刘金铭, 张玉艳, 张碧玲. 基于LSTM-KF的无人机航迹跟踪算法[J]. 北京邮电大学学报, 2022, 45(5): 121-128. |
| LIU Jinming, ZHANG Yuyan, ZHANG Biling. Trajectory Estimation Algorithm for Unmanned Aerial Vehicle Based on LSTM-KF[J]. Journal of Beijing University of Posts and Telecommunications, 2022, 45(5): 121-128. | |
| [9] | QIU Jing, XING Zirui, ZHU Chunsheng, et al. Centralized Fusion Based on Interacting Multiple Model and Adaptive Kalman Filter for Target Tracking in Underwater Acoustic Sensor Networks[J]. IEEE Access, 2019, 7: 25948-25958. |
| [10] | YOUN W, MYUNG H. Robust Interacting Multiple Model with Modeling Uncertainties for Maneuvering Target Tracking[J]. IEEE Access, 2019, 7: 65427-65443. |
| [11] | HAN Bo, HUANG Hanqiao, LEI Lei, et al. An Improved IMM Algorithm Based on STSRCKF for Maneuvering Target Tracking[J]. IEEE Access, 2019, 7: 57795-57804. |
| [12] | ELTOUKHY M, AHMAD M O, SWAMY M N S. An Adaptive Turn Rate Estimation for Tracking a Maneuvering Target[J]. IEEE Access, 2020, 8: 94176-94189. |
| [13] | 林晓晶, 肖鹏浩, 何良, 等. 基于极化神经网络的雷达舰船检测识别方法[J]. 上海航天(中英文), 2023, 40(1): 53-60. |
| LIN Xiaojing, XIAO Penghao, HE Liang, et al. Radar Ship Target Detection and Recognition Based on Polarimetric Neural Networks[J]. Aerospace Shanghai(Chinese & English), 2023, 40(1): 53-60. | |
| [14] | DENG Lichuan, LI Da, LI Ruifang. Improved IMM Algorithm Based on RNNs[J]. Journal of Physics: Conference Series, 2020, 1518(1): 012055. |
| [15] | LIU Huajun, XIA Liwei, WANG Cailing. Maneuvering Target Tracking Using Simultaneous Optimization and Feedback Learning Algorithm Based on Elman Neural Network[J]. Sensors, 2019, 19(7): 1596. |
| [16] | BAI Yuting, WANG Xiaoyi, JIN Xuebo, et al. A Neuron-Based Kalman Filter with Nonlinear Autoregressive Model[J]. Sensors, 2020, 20(1): 299. |
| [17] | 党晓方, 蔡兴雨. 基于Transformer的机动目标跟踪技术[J]. 电子科技, 2023, 36(9): 86-92. |
| DANG Xiaofang, CAI Xingyu. Transformer-Based Maneuvering Target Tracking[J]. Electronic Science and Technology, 2023, 36(9): 86-92. | |
| [18] | LIU Jingxian, WANG Zulin, XU Mai. DeepMTT: A Deep Learning Maneuvering Target-Tracking Algorithm Based on Bidirectional LSTM Network[J]. Information Fusion, 2020, 53: 289-304. |
| [19] | LIM B, ZOHREN S, ROBERTS S. Recurrent Neural Filters: Learning Independent Bayesian Filtering Steps for Time Series Prediction[C]∥2020 International Joint Conference on Neural Networks (IJCNN). Piscataway: IEEE, 2020: 1-8. |
| [20] | 虞卞雨萱, 陆科林, 符启恩, 等. 基于神经网络和无迹卡尔曼滤波融合的天线罩误差斜率估计方法[J]. 战术导弹技术, 2023(1): 121-131, 161. |
| YU Bianyuxuan, LU Kelin, FU Qien, et al. A Radome Slope Estimation Method Based on Fusion of Neural Network and Unscented Kalman Filter[J]. Tactical Missile Technology, 2023(1): 121-131, 161. | |
| [21] | 邱建杰, 蔡益朝, 李浩, 等. 基于动态估计反馈的灰色理论航迹关联算法[J]. 系统工程与电子技术, 2024, 46(4): 1401-1411. |
| QIU Jianjie, CAI Yizhao, LI Hao, et al. Grey Theory Track Association Algorithm Based on Dynamic Estimation Feedback[J]. Systems Engineering and Electronics, 2024, 46(4): 1401-1411. | |
| [22] | 王新, 杨任农, 左家亮, 等. 基于HPSO-TPFENN的目标机轨迹预测[J]. 西北工业大学学报, 2019, 37(3): 612-620. |
| WANG Xin, YANG Rennong, ZUO Jialiang, et al. Trajectory Prediction of Target Aircraft Based on HPSO-TPFENN Neural Network[J]. Journal of Northwestern Polytechnical University, 2019, 37(3): 612-620. | |
| [23] | SON G, KWON S, PARK N. Gender Classification Based on the Non-lexical Cues of Emergency Calls with Recurrent Neural Networks (RNN)[J]. Symmetry, 2019, 11(4): 525. |
| [24] | ZHANG Ananjing, LIU Hongyi, CHANG Qing, et al. Recurrent Neural Network for Motion Trajectory Prediction in Human-Robot Collaborative Assembly[J]. CIRP Annals, 2020, 69(1): 9-12. |
| [25] | WANG Jinyong, ZHANG Ce. Software Reliability Prediction Using a Deep Learning Model Based on the RNN Encoder-Decoder[J]. Reliability Engineering & System Safety, 2018, 170: 73-82. |
| [26] | 李洁, 林永峰. 基于多时间尺度RNN的时序数据预测[J]. 计算机应用与软件, 2018, 35(7): 33-37, 62. |
| LI Jie, LIN Yongfeng. Prediction of Time Series Data Based on Multi-time Scale RNN[J]. Computer Applications and Software, 2018, 35(7): 33-37, 62. | |
| [27] | HORNG G J, HUANG Y C, YIN Zongxian. Using Bidirectional Long-Term Memory Neural Network for Trajectory Prediction of Large Inner Wheel Routes[J]. Sustainability, 2022, 14(10): 5935. |
| [28] | 何友, 修建娟, 刘瑜, 等. 雷达数据处理及应用[M]. 4版. 北京: 电子工业出版社, 2022. |
| HE You, XIU Jianjuan, LIU Yu, et al. Radar Data Processing with Applications[M]. 4th ed. Beijing: Publishing House of Electronics Industry, 2022. | |
| [29] | 孙陈影, 沈希忠. LSTM和GRU在城市声音分类中的应用[J]. 应用技术学报, 2020, 20(2): 158-164. |
| SUN Chenying, SHEN Xizhong. Research and Application of LSTM and GRU in Urban Sound Classification[J]. Journal of Technology, 2020, 20(2): 158-164. | |
| [30] | MNIH V, HEESS N, GRAVES A, et al. Recurrent Models of Visual Attention[C]∥Proceedings of the 28th International Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2014: 2204-2212. |
| [31] | 何迎. 双级卷积神经网络高光谱图像分类[D]. 兰州: 兰州大学, 2020. |
| HE Ying. Dual-Level Convolutional Neural Network for HSI Classification[D]. Lanzhou: Lanzhou University, 2020. | |
| [32] | 李思寒, 仇怀利, 吴佳, 等. 基于卷积神经网络的漏液视觉检测[J]. 液晶与显示, 2021, 36(5): 741-750. |
| LI Sihan, QIU Huaili, WU Jia, et al. Visual Detection of Liquid Leakage Based on Convolutional Neural Network[J]. Chinese Journal of Liquid Crystals and Displays, 2021, 36(5): 741-750. | |
| [33] | PRECHELT L. Early Stopping-But When?[M]∥ORR G B, MÜLLER K R. Neural Networks: Tricks of the Trade. Berlin: Springer Berlin Heidelberg, 1998: 55-69. |
| [34] | JULIER S J, UHLMANN J K, DURRANT-WHYTE H F. A New Approach for Filtering Nonlinear Systems[C]∥Proceedings of 1995 American Control Conference -ACC'95. Piscataway: IEEE, 1995: 1628-1632. |
| [35] | JULIER S, UHLMANN J, DURRANT-WHYTE H F. A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482. |
| [36] | XU Yabo, XU Ke, WAN Jianwei, et al. Research on Particle Filter Tracking Method Based on Kalman Filter[C]∥2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC). Piscataway: IEEE, 2018: 1564-1568. |
| [37] | LIU Jingxian, WANG Zulin, XU Mai, et al. A Deep Neural Network Based Maneuvering-Target Tracking Algorithm[C]∥ICASSP 2019-2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Piscataway: IEEE, 2019: 3117-3121. |
| [1] | 陈凯诺, 张福光, 张涵, 尹延涛, 杜光传. 高阶图神经联合训练的装备剩余寿命预测[J]. 现代防御技术, 2025, 53(4): 148-159. |
| [2] | 赵建印, 姜经纬, 魏顺涛. 基于改进无迹卡尔曼滤波的可靠性评估方法[J]. 现代防御技术, 2025, 53(4): 129-139. |
| [3] | 王宝宝, 辛斌, 万帅帅. 基于目标角速率的要地高炮反导火控技术研究[J]. 现代防御技术, 2025, 53(1): 81-87. |
| [4] | 于勇政, 王伟, 蒲治伟. 基于信息关联加权的多目标跟踪算法[J]. 现代防御技术, 2025, 53(1): 23-36. |
| [5] | 窦凇耀, 陈映, 陈燕, 刘政玮. 一种多雷达机动目标探测高阶运动特征估计方法[J]. 现代防御技术, 2024, 52(1): 102-110. |
| [6] | 王嘉楠, 彭晓乐, 王之昊, 谭铮. 全捷联光学导引头视线角速率提取研究[J]. 现代防御技术, 2023, 51(6): 77-86. |
| [7] | 于勇政, 邵学辉, 高仕博, 蒲治伟, 薛冰. 多平台协同跟踪最优构型设计[J]. 现代防御技术, 2023, 51(3): 107-119. |
| [8] | 周方宇, 周洁, 陈超波, 高嵩. 基于克隆免疫决策的无人机集群协同探测跟踪[J]. 现代防御技术, 2022, 50(5): 93-105. |
| [9] | 安雷, 李召瑞, 吉兵. 辐射风险和多目标跟踪精度约束下的传感器调度方法[J]. 现代防御技术, 2021, 49(6): 56-67. |
| [10] | 赵凯丽, 高火涛, 曹婷. 临近空间高超声速目标跟踪IMMCPF算法[J]. 现代防御技术, 2018, 46(5): 94-101. |
| [11] | 李人杰, 陈杨, 向开恒. 考虑初始相位角影响的空间飞越发射窗口研究[J]. 现代防御技术, 2018, 46(3): 171-176. |
| [12] | 孙永侃, 张萍萍. 第三方引导下的极区超视距目标指示方法[J]. 现代防御技术, 2018, 46(3): 66-72. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
