Modern Defense Technology ›› 2026, Vol. 54 ›› Issue (1): 1-13.DOI: 10.3969/j.issn.1009-086x.2026.01.001
• SPECIAL COLUMN •
Xiaowen CHEN, Qing YANG, Junmin WANG
Received:2024-10-22
Revised:2025-01-29
Online:2026-01-28
Published:2026-02-11
Contact:
Qing YANG
通讯作者:
杨青
作者简介:陈晓文(1981-),男,湖南长沙人。高工,硕士,研究方向为无人作战任务规划系统和无人系统软硬件集成。
CLC Number:
Xiaowen CHEN, Qing YANG, Junmin WANG. Survival Strategies for Unmanned Aerial Vehicle Systems Under Strong Denial Conditions[J]. Modern Defense Technology, 2026, 54(1): 1-13.
陈晓文, 杨青, 王军民. 强拒止条件下的无人机系统生存策略[J]. 现代防御技术, 2026, 54(1): 1-13.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.xdfyjs.cn/EN/10.3969/j.issn.1009-086x.2026.01.001
| 问题 | 应对策略 |
|---|---|
| 电磁拒止 | 分离地面通信电台与地面指控中心 对无人机电子设备增强电磁防护,提高抗干扰能力 不采用或关闭主动探测微波雷达,降低无人机对外的电磁辐射 高空飞行 |
| 火力拒止 | 对常规路径规划后的航迹进行二次规划,提高威胁区生存概率 实时分析威胁目标,实时规划路径 提高无人机的机动性能 不采用或关闭主动探测雷达,降低被拒止区雷达发现的概率 关闭动力装置,采用滑翔飞行,降低被拒止区红外雷达发现的概率 |
| 通信拒止 | 拒止区内无人机主动关闭通信功能,化被动为主动 拒止区内自主执行任务,无需借助通信实现 储存侦察数据,返回安全区再回传 |
| 导航拒止 | 拒止区采用惯性导航、视觉导航等自主导航方式 |
Table 1 Denial issues and response strategies
| 问题 | 应对策略 |
|---|---|
| 电磁拒止 | 分离地面通信电台与地面指控中心 对无人机电子设备增强电磁防护,提高抗干扰能力 不采用或关闭主动探测微波雷达,降低无人机对外的电磁辐射 高空飞行 |
| 火力拒止 | 对常规路径规划后的航迹进行二次规划,提高威胁区生存概率 实时分析威胁目标,实时规划路径 提高无人机的机动性能 不采用或关闭主动探测雷达,降低被拒止区雷达发现的概率 关闭动力装置,采用滑翔飞行,降低被拒止区红外雷达发现的概率 |
| 通信拒止 | 拒止区内无人机主动关闭通信功能,化被动为主动 拒止区内自主执行任务,无需借助通信实现 储存侦察数据,返回安全区再回传 |
| 导航拒止 | 拒止区采用惯性导航、视觉导航等自主导航方式 |
Fig. 1 Unmanned aerial vehicle operational picture under strong denial conditions
Fig. 2 Composition structure and command information flow diagram of unmanned aerial vehicle system
Fig. 3 Conceptual diagram of movement tactics for unmanned aerial vehicle system

Fig. 4 Typical process of movement tactics for unmanned aerial vehicle systems
Fig. 5 Schematic diagram of directional probability distribution of bifocus random walk algorithm
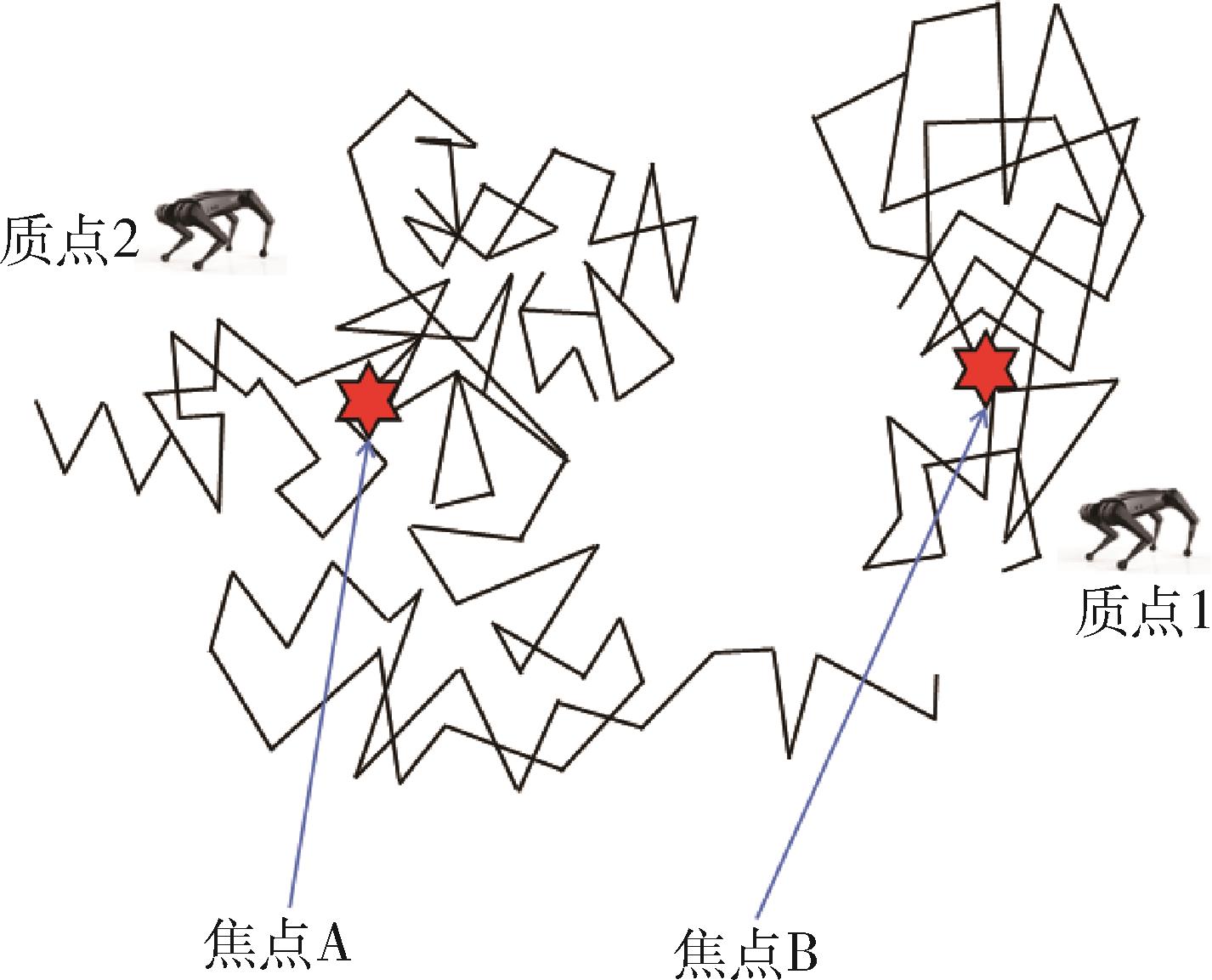
Fig. 6 Schematic diagram of the motion trajectory of bifocus random walk
| 约束编号 | 约束描述 |
|---|---|
| 威胁区约束 | |
| 航速约束 | |
| 转弯半径约束 | |
| 失速约束 | |
| 爬坡约束 | |
| 机载 |
Table 2 Common constraint problems
| 约束编号 | 约束描述 |
|---|---|
| 威胁区约束 | |
| 航速约束 | |
| 转弯半径约束 | |
| 失速约束 | |
| 爬坡约束 | |
| 机载 |
| 约束编号 | 特点 | 优势 | 不足 |
|---|---|---|---|
| A*算法 | 一种启发式空间搜索算法,它通过引入启发式函数来指导搜索方向,能够较快地找到最短路径 | 搜索效率高,在已知环境中能快速规划出最优路径 路径平滑,适合无人机等需要稳定飞行的平台 | 对于动态环境适应性较差 在处理复杂障碍物时,可能需要较高的计算资源 |
| 最短切线法 | 应用切线定理计算移动物体到障碍物所在圆区的切线长,选择绕过障碍物的最佳切线路径 | 实时避障:实时计算出避开障碍物的最优路径,确保移动过程安全有效 计算效率:其计算过程相对直观且高效 扩展性:可以作为一种基础算法进行扩展和优化,以适应更复杂的环境和需求 | 边界处理:计算切线路径时,可能需要额外的边界判断来防止移动物体超出预定的区域或边界,这增加了算法的复杂性和计算成本 障碍物的形状和大小限制:通常假设障碍物为圆形区域 未考虑全局最优性:无法保证找到全局最优路径 |
| 遗传算法 | 生物进化过程的优化算法,通过不断迭代优化路径 | 适用于全局优化问题,能够找到全局最优解或近似最优解 可以处理复杂约束条件,如无人机的机动性能限制 | 计算量大,收敛速度较慢 对于动态环境的适应性有限,需要定期重新规划路径 |
| RRT快速搜索随机树算法 | 基于采样的路径规划算法,不需要对任务区域预处理,搜索树能快速朝着未知区域搜索。 | 对未知环境适应性强,能够快速探索并找到可行路径 适用于动态环境,能够实时响应飞行器位置或速度的变化 | 生成的路径可能不够平滑,需要进行后处理 在障碍物密集的环境中,可能产生大量的采样无效点,导致规划时间增加 |
| 基于深度强化学习算法的无人机智能规避决策 | 学习历史数据中的避障策略和飞行模式,使无人机自主选择安全的飞行路径。 | 适用于复杂动态的空战环境,能够实时学习和适应新的威胁模式 具有较高的避障成功率和存活率 | 需要大量的训练数据和计算资源 算法的稳定性和泛化能力需要进一步验证 |
Table 3 Comparison of commonly used UAV path planning algorithms
| 约束编号 | 特点 | 优势 | 不足 |
|---|---|---|---|
| A*算法 | 一种启发式空间搜索算法,它通过引入启发式函数来指导搜索方向,能够较快地找到最短路径 | 搜索效率高,在已知环境中能快速规划出最优路径 路径平滑,适合无人机等需要稳定飞行的平台 | 对于动态环境适应性较差 在处理复杂障碍物时,可能需要较高的计算资源 |
| 最短切线法 | 应用切线定理计算移动物体到障碍物所在圆区的切线长,选择绕过障碍物的最佳切线路径 | 实时避障:实时计算出避开障碍物的最优路径,确保移动过程安全有效 计算效率:其计算过程相对直观且高效 扩展性:可以作为一种基础算法进行扩展和优化,以适应更复杂的环境和需求 | 边界处理:计算切线路径时,可能需要额外的边界判断来防止移动物体超出预定的区域或边界,这增加了算法的复杂性和计算成本 障碍物的形状和大小限制:通常假设障碍物为圆形区域 未考虑全局最优性:无法保证找到全局最优路径 |
| 遗传算法 | 生物进化过程的优化算法,通过不断迭代优化路径 | 适用于全局优化问题,能够找到全局最优解或近似最优解 可以处理复杂约束条件,如无人机的机动性能限制 | 计算量大,收敛速度较慢 对于动态环境的适应性有限,需要定期重新规划路径 |
| RRT快速搜索随机树算法 | 基于采样的路径规划算法,不需要对任务区域预处理,搜索树能快速朝着未知区域搜索。 | 对未知环境适应性强,能够快速探索并找到可行路径 适用于动态环境,能够实时响应飞行器位置或速度的变化 | 生成的路径可能不够平滑,需要进行后处理 在障碍物密集的环境中,可能产生大量的采样无效点,导致规划时间增加 |
| 基于深度强化学习算法的无人机智能规避决策 | 学习历史数据中的避障策略和飞行模式,使无人机自主选择安全的飞行路径。 | 适用于复杂动态的空战环境,能够实时学习和适应新的威胁模式 具有较高的避障成功率和存活率 | 需要大量的训练数据和计算资源 算法的稳定性和泛化能力需要进一步验证 |
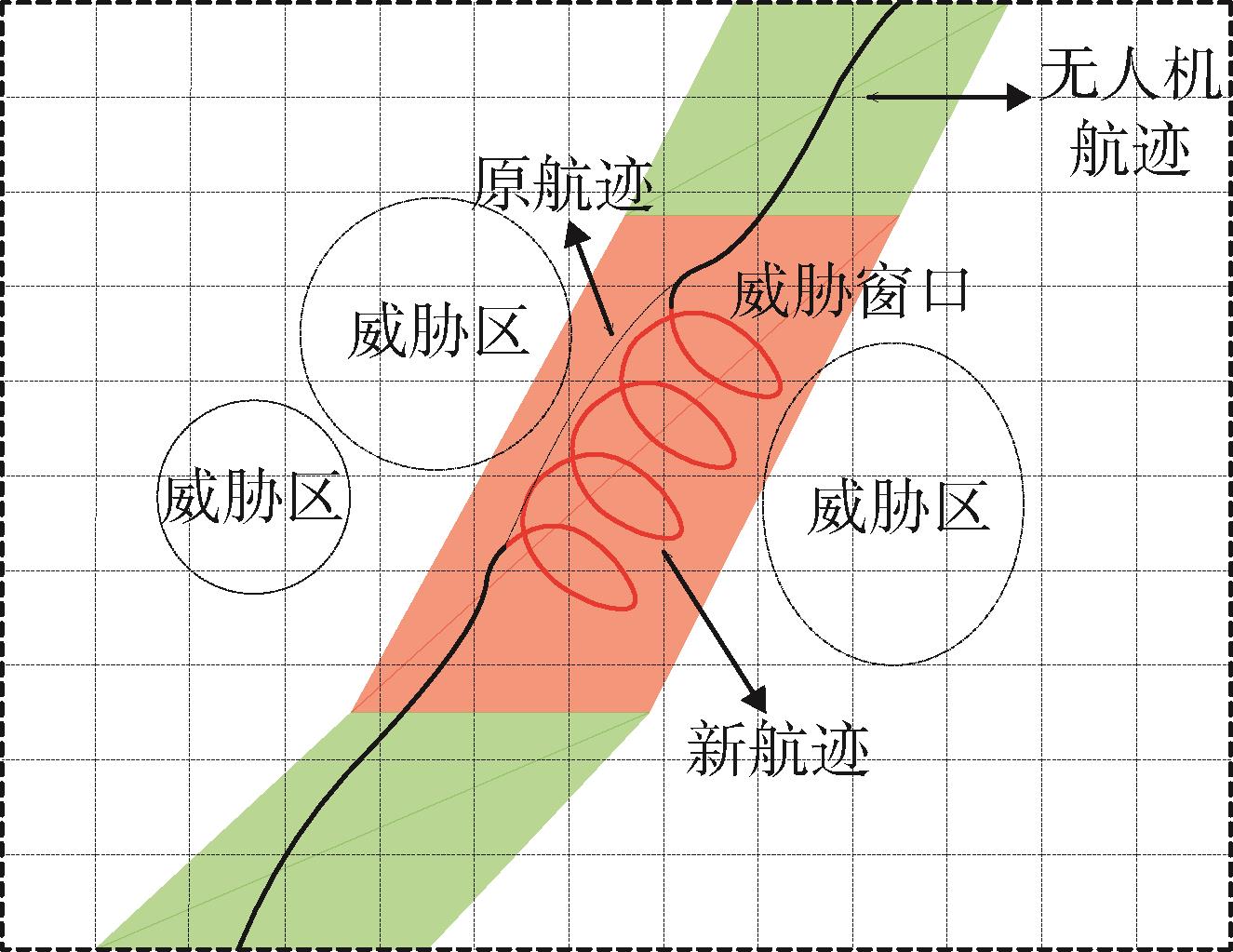
Fig. 7 Schematic diagram of spiral variable speed maneuver in the threat window area
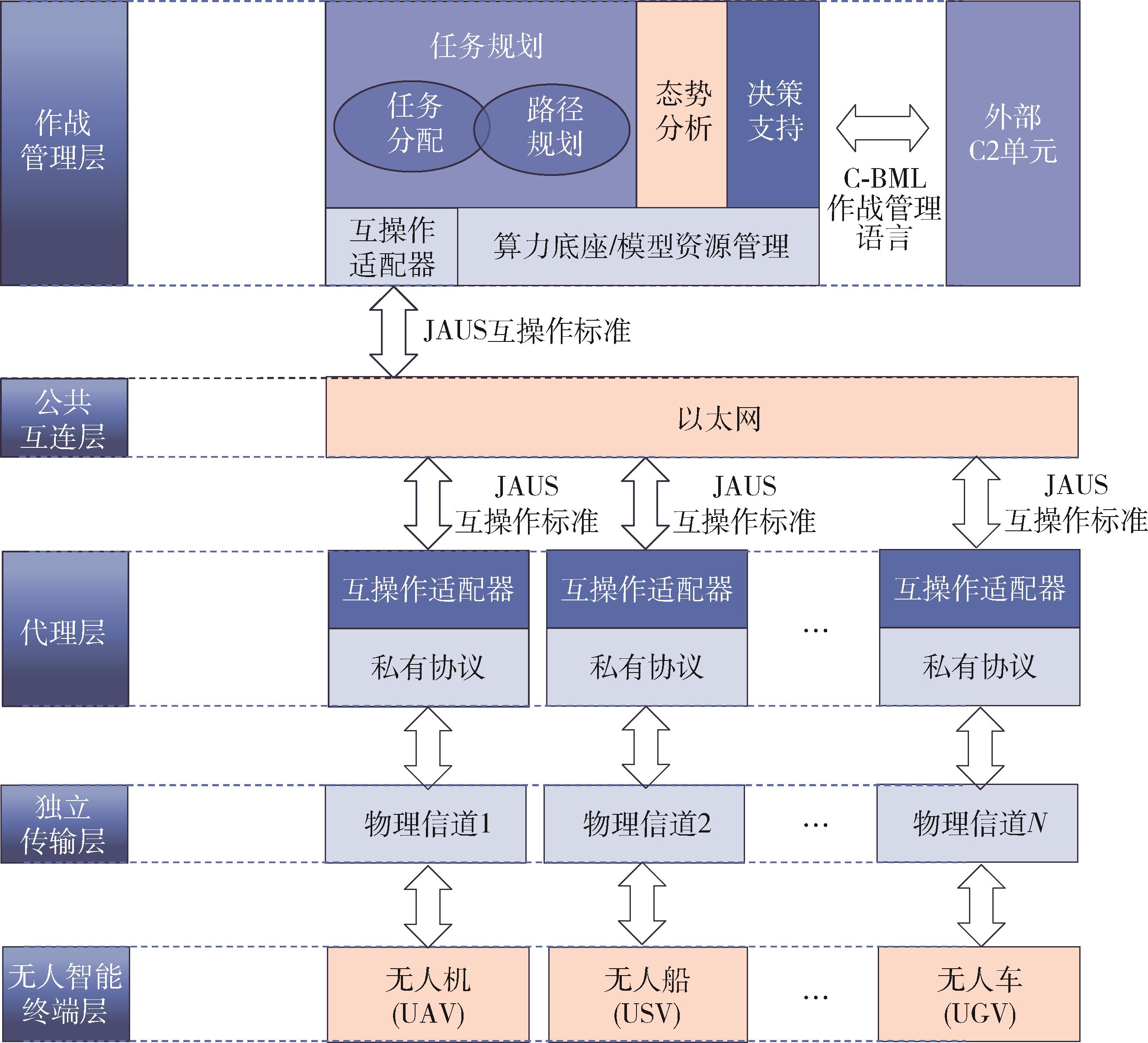
Fig. 8 Service-oriented intelligent edge control system architecture
| [1] | 罗俊海, 王芝燕. 无人机探测与对抗技术发展及应用综述[J]. 控制与决策, 2022, 37(3): 530-544. |
| LUO Junhai, WANG Zhiyan. A Review of Development and Application of UAV Detection and Counter Technology[J]. Control and Decision, 2022, 37(3): 530-544. | |
| [2] | 薛德鑫, 单涛, 徐宁骏, 等. 军用作战无人机未来发展研究[J]. 指挥控制与仿真, 2022, 44(6): 1-6. |
| XUE Dexin, SHAN Tao, XU Ningjun, et al. Research on the Future Development of Military Combat UAV[J]. Command Control & Simulation, 2022, 44(6): 1-6. | |
| [3] | 韩子硕, 范喜全, 郝齐. 国内外无人机系统研究进展及应用[J]. 无线电工程, 2024, 54(5): 1236-1246. |
| HAN Zishuo, FAN Xiquan, HAO Qi. Research Progress and Applications of UAV Systems at Home and Abroad[J]. Radio Engineering, 2024, 54(5): 1236-1246. | |
| [4] | 范会兵, 果金龙, 罗广文. 无人机部队重度参与军事武装力量构建国外军用无人机发展现状[J]. 轻兵器, 2022(9): 28-31. |
| FAN Huibing, GUO Jinlong, LUO Guangwen. Heavy Participation of Drone Troops in the Construction of Military Armed Forces-Current Development Status of Foreign Military Drones[J]. Small Arms, 2022(9): 28-31. | |
| [5] | 李晓阳. 美国陆军战术无人机建设发展研究[J]. 兵工自动化, 2023, 42(1): 82-85. |
| LI Xiaoyang. Research on Construction and Development of US Army Tactical UAV[J]. Ordnance Industry Automation, 2023, 42(1): 82-85. | |
| [6] | 刘箴, 吴馨远, 许洁心. 无人机集群作战系统的新发展及趋势分析[J]. 弹箭与制导学报, 2022, 42(6): 32-45. |
| LIU Zhen, WU Xinyuan, XU Jiexin. New Development and Trend Analysis of UAV Swarming Operation System[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2022, 42(6): 32-45. | |
| [7] | 操羿, 黎静, 张永新, 等. 俄乌冲突中FPV攻击无人机攻防运用初探[J]. 中国军转民, 2024(11): 20-22. |
| CAO Yi, LI Jing, ZHANG Yongxin, et al. Preliminary Study on the Application of FPV Attacking UAV in the Russia-Ukraine Conflict[J]. Defence Industry Conversion in China, 2024(11): 20-22. | |
| [8] | 罗广文, 果金龙, 范会兵. 集中爆发、多有突破: 我国无人机发展概况[J]. 轻兵器, 2022(9): 24-27. |
| LUO Guangwen, GUO Jinlong, FAN Huibing. Concentrated Outbreak and Multiple Breakthroughs: Overview of the Development of Unmanned Aerial Vehicles in China[J]. Small Arms, 2022(9): 24-27. | |
| [9] | SARANOVIC D, PAVLOVSKI M, POWER W, et al. Interception of Automated Adversarial Drone Swarms in Partially Observed Environments[J]. Integrated Computer-Aided Engineering, 2021, 28(4): 335-348. |
| [10] | MAGOULIANITIS V, ATALOGLOU D, DIMOU A, et al. Does Deep Super-Resolution Enhance UAV Detection?[C]∥2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). Piscataway: IEEE, 2019: 1-6. |
| [11] | 温卓漫, 陈长泳, 张雁平, 等. 军用无人机反制技术综述[J]. 电子信息对抗技术, 2022, 37(1): 21-26, 40. |
| WEN Zhuoman, CHEN Changyong, ZHANG Yanping, et al. Review of Military Unmanned Aircraft Systems Countermeasures Technology[J]. Electronic Information Warfare Technology, 2022, 37(1): 21-26, 40. | |
| [12] | 高新栋, 杨梅枝. 以色列反无人机系统发展现状及趋势[J]. 飞航导弹, 2021(11): 19-24. |
| GAO Xindong, YANG Meizhi. Current Status and Trends of Israel's Anti UAV System Development[J]. Aerodynamic Missile Journal, 2021(11): 19-24. | |
| [13] | 束哲, 刘芳, 徐海洋, 等. 国外反无人机装备发展态势及启示[J]. 国防科技, 2024, 45(4): 43-53. |
| SHU Zhe, LIU Fang, XU Haiyang, et al. Development Trends and Inspirations of Anti-UAV Equipment Overseas[J]. National Defense Technology, 2024, 45(4): 43-53. | |
| [14] | BAHADUR P S. Review on LASER and Its Application in Diverse Defence Field[J]. International Journal for Modern Trends in Science and Technology, 2018, 4(12): 8-12. |
| [15] | FORTUNE D, NITSCH H, MARKARIAN G, et al. Counter-Unmanned Aerial Vehicle Systems: Technical, Training, and Regulatory Challenges[M]∥MARKARIAN G, KARLOVIĆ R, NITSCH H, et al. Security Technologies and Social Implications. Piscataway: IEEE, 2022: 122-148. |
| [16] | 刘伟, 张琳, 王代强, 等. 激光武器反无人机集群作战运用及关键技术[J]. 航空学报, 2024, 45(12): 239-253. |
| LIU Wei, ZHANG Lin, WANG Daiqiang, et al. Application and Key Technologies of Laser Weapons in Anti-UAV Swarm Operations[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(12): 239-253. | |
| [17] | XIN Bin, WANG Yipeng, CHEN Jie. An Efficient Marginal-Return-Based Constructive Heuristic to Solve the Sensor-Weapon-Target Assignment Problem[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(12): 2536-2547. |
| [18] | CHANG Tianqing, KONG Depeng, HAO Na, et al. Solving the Dynamic Weapon Target Assignment Problem by an Improved Artificial Bee Colony Algorithm with Heuristic Factor Initialization[J]. Applied Soft Computing, 2018, 70: 845-863. |
| [19] | EDWARDS D M. Simulated Laser Weapon System Decision Support to Combat Drone Swarms with Machine Learning[D]. Monterey: Naval Postgraduate School, 2021. |
| [20] | OSINGA F. ‘Getting’ A Discourse on Winning and Losing: A Primer on Boyd's ‘Theory of Intellectual Evolution’[J]. Contemporary Security Policy, 2013, 34(3): 603-624. |
| [21] | 徐爽. 面向多任务的作战体系结构智能构建技术研究[D]. 南京: 南京大学, 2021. |
| XU Shuang. Research on Intelligent Construction Technology of Multi-mission Combat Architecture[D]. Nanjing: Nanjing University, 2021. | |
| [22] | 邓梦婷. 基于OODA环的区域防空反导作战建模与效能评估[D]. 武汉: 华中科技大学, 2020. |
| DENG Mengting. Modeling and Effectiveness Evaluation of Regional Air Defense and Anti-missile Operations Based on OODA Loop[D]. Wuhan: Huazhong University of Science & Technology, 2020. | |
| [23] | 何文彪, 胡永江, 李文广. 面向无人机航路的优化算法研究综述[J]. 现代防御技术, 2024, 52(4): 24-32. |
| HE Wenbiao, HU Yongjiang, LI Wenguang. Review of Optimization Algorithms for UAV Routes[J]. Modern Defence Technology, 2024, 52(4): 24-32. | |
| [24] | 曹江, 高岚岚. 互操作、互理解、互遵循—军事信息系统的新型能力目标与评估模型[J]. 指挥与控制学报, 2015, 1(1): 41-45. |
| CAO Jiang, GAO Lanlan. Interoperable, Understandable, Compliant the Novel Capability Goal and Evaluation Model for Military Information System[J]. Journal of Command and Control, 2015, 1(1): 41-45. | |
| [25] | 中国人民解放军总装备部. 军事信息系统互操作性等级与评估: [S]. 北京: 中国人民解放军总装备部, 2015: 1-13. |
| 144A-2015 G. Levels and Assessment of Interoperability for Military Information System: [S]. Beijing: General Equipment Department of the Chinese People's Liberation Army, 2015: 1-13. | |
| [26] | 林波, 黄今辉, 尹峻松. 一种分布式智能指挥控制体系架构[J]. 指挥与控制学报, 2023, 9(4): 425-432. |
| LIN Bo, HUANG Jinhui, YIN Junsong. An Architecture on Distributed Intelligent Command and Control System[J]. Journal of Command and Control, 2023, 9(4): 425-432. | |
| [27] | 刘兆鹏, 司光亚, 柳少军, 等. 面向仿真推演的异构系统互操作方法[J]. 指挥与控制学报, 2019, 5(1): 18-24. |
| LIU Zhaopeng, SI Guangya, LIU Shaojun, et al. The Interoperability Research of Heterogeneous Systems in Wargaming[J]. Journal of Command and Control, 2019, 5(1): 18-24. | |
| [28] | ETSI. Satellite Earth Stations and Systems (SES); Broadband Satellite Multimedia ( ); Common Air Interface Specification; Satellite Independent Service Access Point (SI-SAP) Interface: Primitives: ETSI TS 102 357 V1.2.1[S]. Nice: ETSI, 2015: 9-23. |
| [1] | Xuejian FENG, Yifei LI, Yiqi TONG, Yanjin ZHANG. An Improved ARA*-Based Path Planning Algorithm for UAV [J]. Modern Defense Technology, 2025, 53(6): 101-110. |
| [2] | Chuan LI, Yan HAO, Xinxing FENG, Na MA, Changzheng MA, Da LIU, Shixue YANG. Construction of UAV Defense System of Urban Low-Altitude Airspace [J]. Modern Defense Technology, 2025, 53(6): 12-20. |
| [3] | Yu QIN, Hua CHAI, Fuyunxiang YANG, Zhen BAI. Deployment Optimization Method for High Power Microwave Anti-drone Swarm [J]. Modern Defense Technology, 2025, 53(6): 46-59. |
| [4] | Qing CHEN, Chun ZHOU, Xinjun LIU, Ruijun LUO. Stationary Finite-time Formation Control of UAVs Under Bearing Constraints [J]. Modern Defense Technology, 2025, 53(5): 197-205. |
| [5] | Daquan DU, Yang ZHAO, Ping HU. Study on Target Characteristics Analysis and Firing Test Application of Radar Stealth Target Drone [J]. Modern Defense Technology, 2025, 53(4): 121-128. |
| [6] | Jiaheng TANG, Boyi XIAO, Chenbo DING, Hengzhi FAN, Maolong LÜ. Research on Target Allocation and Path Planning Methods for Manned/Unmanned Aerial Vehicle Cooperative Ground Attack [J]. Modern Defense Technology, 2025, 53(4): 27-35. |
| [7] | Mi WU, Xianqiao CHEN, Weiwen SHEN. State Observer-Based Formation Maneuvering Control of Unmanned Aircraft Swarms [J]. Modern Defense Technology, 2025, 53(3): 112-119. |
| [8] | Daquan DU, Changjiang DONG. Research on the Development Trend of Target Drone [J]. Modern Defense Technology, 2025, 53(3): 42-48. |
| [9] | Weidong WANG, Jian YANG, Jiadong SHANG, Hui GAO, Qiannan ZHANG, Shuo ZHANG. A Rapid Neighbor Discovery Method for Directional Flying Ad-Hoc Networks Based on MIMO-OTFS Integrated Sensing and Communication Waveform [J]. Modern Defense Technology, 2025, 53(2): 107-120. |
| [10] | Wenbiao HE, Yongjiang HU, Wenguang LI. Review of Optimization Algorithms for UAV Routes [J]. Modern Defense Technology, 2024, 52(4): 24-32. |
| [11] | Jingyu HE, Jizheng LIU, Zhichen YANG, Dongdong WANG, Ping OU. Development and Testing of Multi Rotor Unmanned Aerial Vehicle Noise Source Tracking and Positioning System [J]. Modern Defense Technology, 2024, 52(3): 1-8. |
| [12] | Linan WANG, Guanghui WEN, Xiaojian YI. Finite-time Attitude Consensus Control of Multiple Unmanned Aerial Vehicles Under State Constraints [J]. Modern Defense Technology, 2024, 52(2): 124-131. |
| [13] | Wenru FAN, Quanwei LIU, Bailing TIAN. Trajectory Tracking Control of Quadrotor UAV Based on Disturbance Compensation [J]. Modern Defense Technology, 2024, 52(2): 87-93. |
| [14] | Hanwen ZHANG, Xusheng GAN, Xiaolong WEI, Rongjia TONG. Research on Air Combat Maneuver Decision-Making of UAVs Based on Path-Game Hybrid Strategy [J]. Modern Defense Technology, 2023, 51(6): 87-96. |
| [15] | Ruijie WANG, Dechao WANG, Lu FENG, Zhengdang ZHAO, Zheliang CHEN. Research Progress and Countermeasures Against UAV Swarm Operations Abroad [J]. Modern Defense Technology, 2023, 51(4): 1-9. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||


