| [1] |
何明, 陈浩天, 韩伟, 等. 无人机仿鸟群协同控制发展现状及关键技术[J]. 航空学报, 2024, 45(20): 184-206.
|
|
HE Ming, CHEN Haotian, HAN Wei, et al. Development Status and Key Technologies of Cooperative Control of Bird-Inspired UAV Swarms[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 184-206.
|
| [2] |
邱华鑫, 段海滨. 从鸟群群集飞行到无人机自主集群编队[J]. 工程科学学报, 2017, 39(3): 317-322.
|
|
QIU Huaxin, DUAN Haibin. From Collective Flight in Bird Flocks to Unmanned Aerial Vehicle Autonomous Swarm Formation[J]. Journal of University of Science and Technology Beijing, 2017, 39(3): 317-322.
|
| [3] |
CAVAGNA A, GIARDINA I. Bird Flocks as Condensed Matter[J]. Annual Review of Condensed Matter Physics, 2014, 5: 183-207.
|
| [4] |
BASTIEN R, ROMANCZUK P. A Model of Collective Behavior Based Purely on Vision[J]. Science Advances, 2020, 6(6): eaay0792.
|
| [5] |
ATTANASI A, CAVAGNA A, DEL CASTELLO L, et al. Emergence of Collective Changes in Travel Direction of Starling Flocks from Individual Birds' Fluctuations[J]. Journal of the Royal Society Interface, 2015, 12(108): 20150319.
|
| [6] |
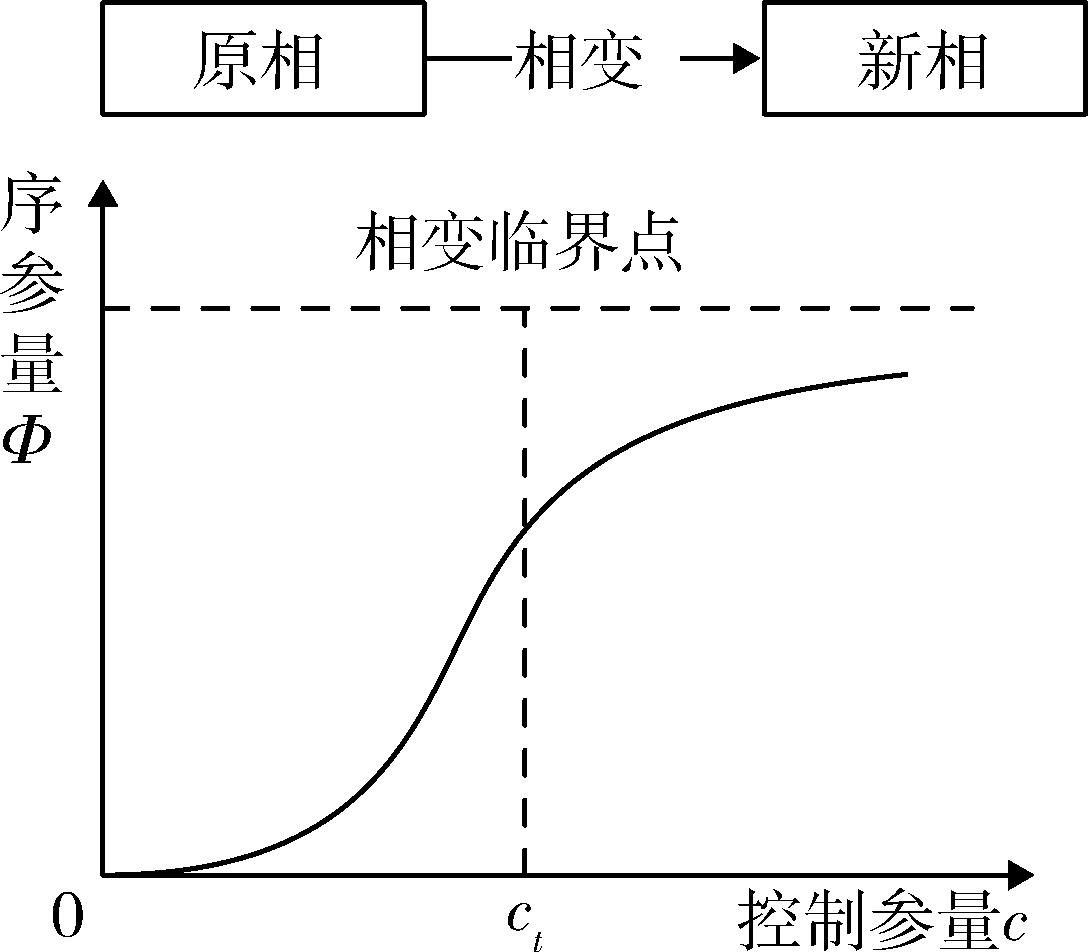
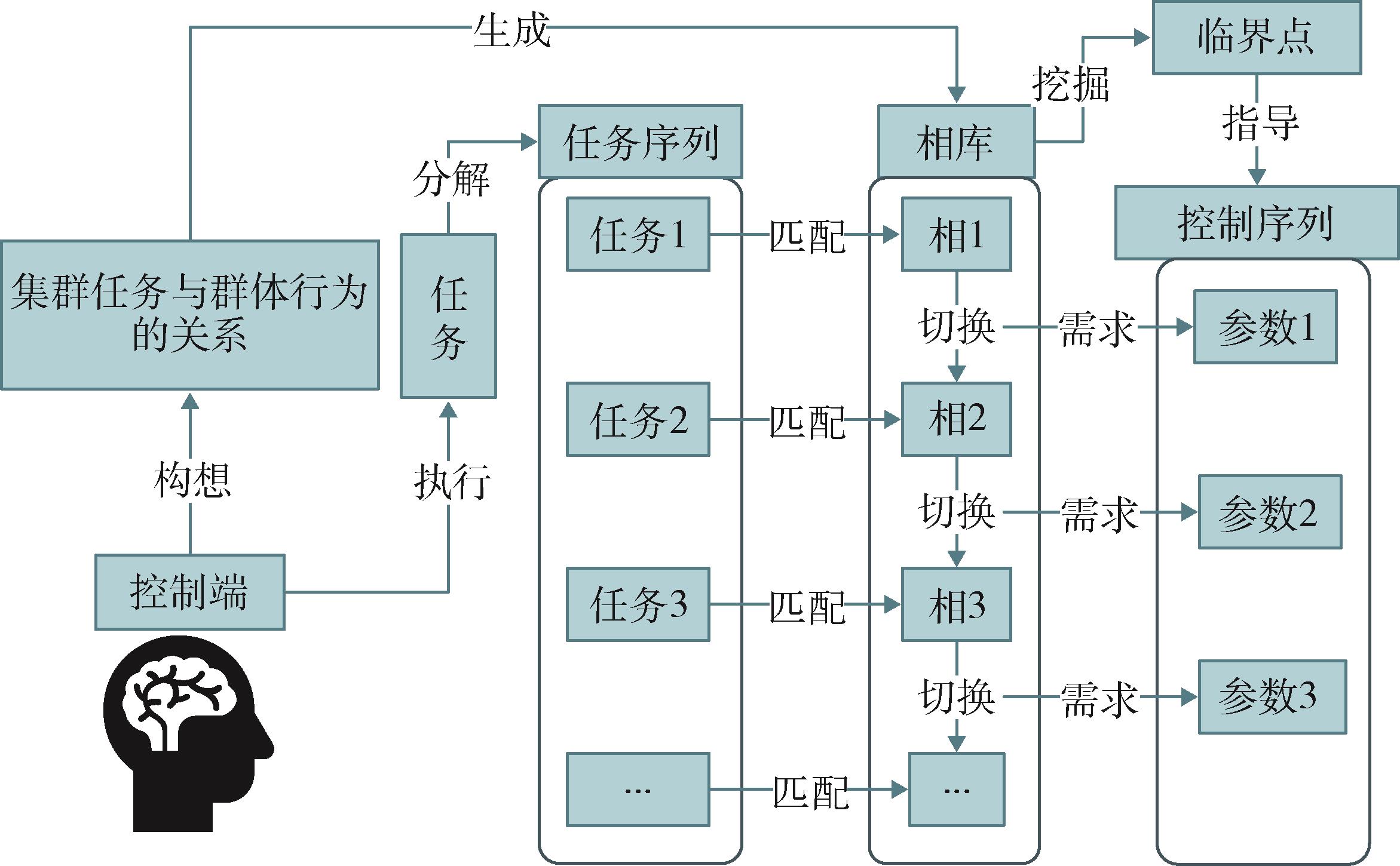
段海滨, 尤灵辰, 范彦铭, 等. 仿鸟群自推进机制的无人机集群相变控制[J]. 自动化学报, 2025, 51(5): 960-971.
|
|
DUAN Haibin, YOU Lingchen, FAN Yanming, et al. Phase Transition Control of UAV Swarm Based on Bird-Inspired Self-Propelled Mechanism[J]. Acta Automatica Sinica, 2025, 51(5): 960-971.
|
| [7] |
XUE Tingting, LI Xu, GRASSBERGER P, et al. Swarming Transitions in Hierarchical Societies[J]. Physical Review Research, 2020, 2(4): 042017.
|
| [8] |
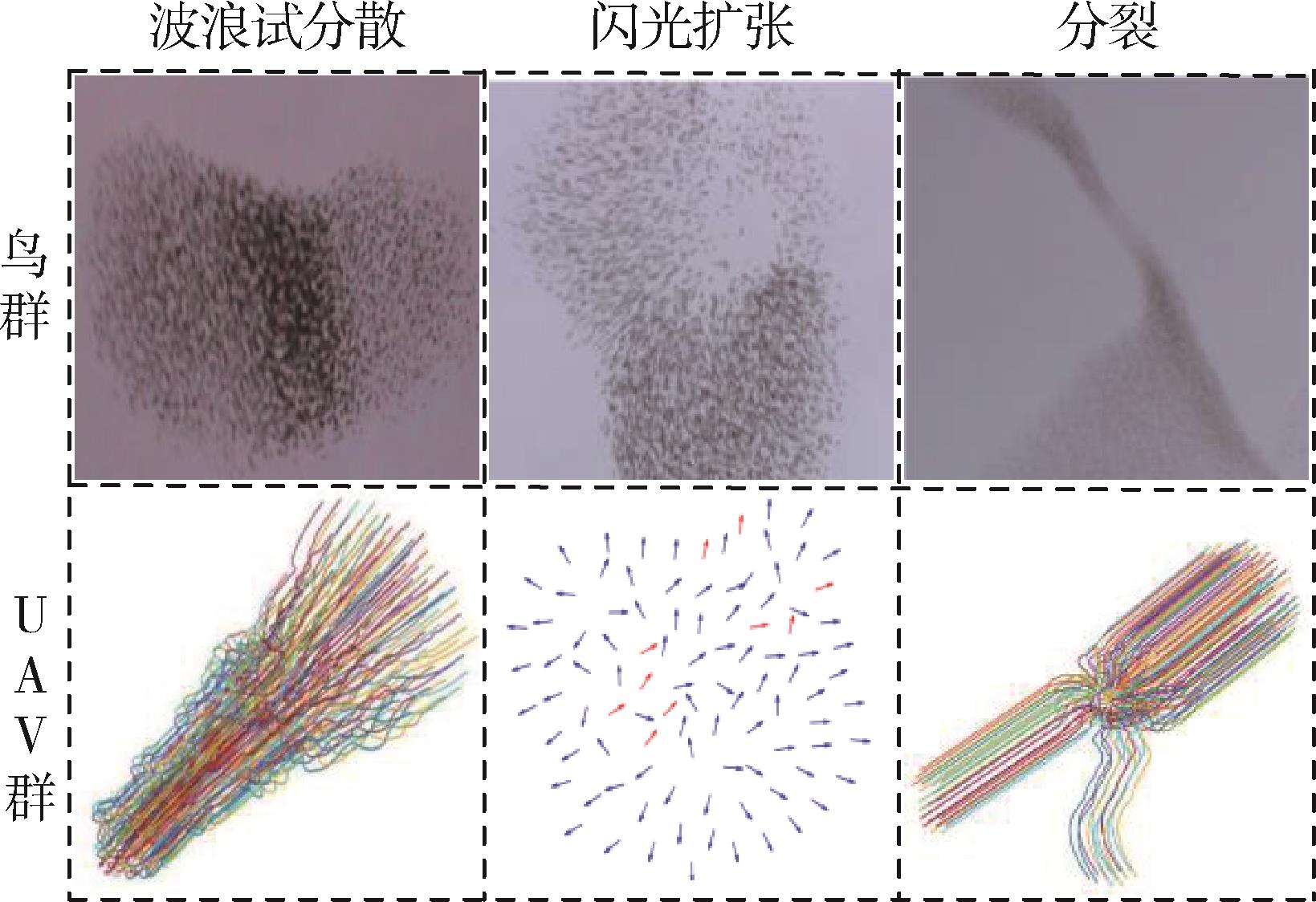
STORMS R F, CARERE C, ZORATTO F, et al. Complex Patterns of Collective Escape in Starling Flocks Under Predation[J]. Behavioral Ecology and Sociobiology, 2019, 73(1): 10.
|
| [9] |
JUNG N, WEON B M, KIM P. Effects of Adaptive Acceleration Response of Birds on Collective Behaviors[J]. Journal of Physics: Complexity, 2022, 3(1): 015014.
|
| [10] |
DUWEZ P. A Typical Example of Metastability: Metallic Glasses[J]. Journal of Vacuum Science & Technology B: Microelectronics Processing and Phenomena, 1983, 1(2): 218-221.
|
| [11] |
CHRISTODOULIDI H, VAN DER WEELE K, ANTONOPOULOS C G, et al. Phase Transitions in Models of Bird Flocking[M]∥NICOLIS G. Chaos, Information Processing and Paradoxical Games. Singapore: World Scientific Publishing Co Pte Ltd, 2014: 383-398.
|
| [12] |
马梓瑞, 司书宾, 陈志伟. 鸟群行为启发的无人机集群协同控制算法[C]∥第六届体系工程学术会议论文集—体系工程与高质量发展会议论文集. 长沙: 国防科技大学系统工程学院, 2024: 483-494.
|
|
MA Zirui, SI Shubin, CHEN Zhiwei. Consensus and Cooperative Control Algorithm for UAV Swarm Inspired by Bird Flock Behavior[C]∥Proceedings of the 6th Conference on Systems Engineering-Systems Engineering and High-Quality Development. Changsha: College of Systems Engineering, National University of Defense Technology, 2024: 483-494.
|
| [13] |
邱浩楠, 何明, 韩伟, 等. 一种仿鸟群行为的无人机集群相变控制方法[J]. 现代防御技术, 2025, 53(1): 11-22.
|
|
QIU Haonan, HE Ming, HAN Wei, et al. A Phase Transition Control Method for UAV Swarm Based on Birds' Behaviors[J]. Modern Defence Technology, 2025, 53(1): 11-22.
|
| [14] |
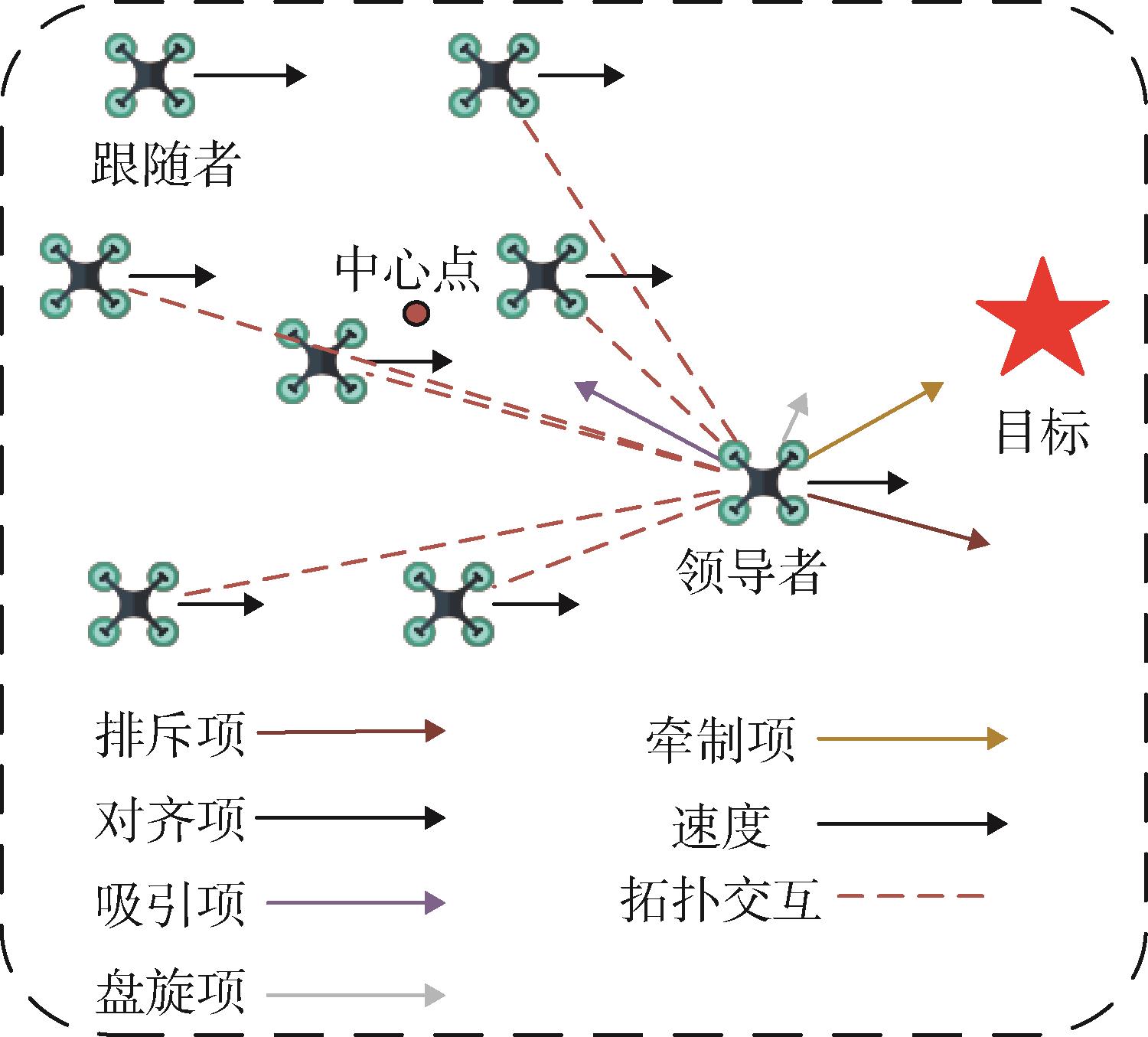
林德平, 王亚祺, 钱荣荣, 等. 领导-跟随协同飞行无人网络的通信容量分析[J]. 北京邮电大学学报, 2023, 46(3): 97-102.
|
|
LIN Deping, WANG Yaqi, QIAN Rongrong, et al. Communication Capacity Analysis for a Class of Leader-Follower Cooperative Flying Unmanned Aerial Vehicle Networks[J]. Journal of Beijing University of Posts and Telecommunications, 2023, 46(3): 97-102.
|
| [15] |
XU Xiaoping, YAN Xiaoting, YANG Wenyuan, et al. Algorithms and Applications of Intelligent Swarm Cooperative Control: A Comprehensive Survey[J]. Progress in Aerospace Sciences, 2022, 135: 100869.
|
| [16] |
LIAO Jian, CHENG Jun, XIN Bin, et al. UAV Swarm Formation Reconfiguration Control Based on Variable-Stepsize MPC-APCMPIO Algorithm[J]. Science China Information Sciences, 2023, 66(11): 212207.
|
| [17] |
LIU Weiheng, ZHENG Xin, DENG Zhihong. Dynamic Collision Avoidance for Cooperative Fixed-Wing UAV Swarm Based on Normalized Artificial Potential Field Optimization[J]. Journal of Central South University, 2021, 28(10): 3159-3172.
|
| [18] |
CHEN Hao, WANG Xiangke, SHEN Lincheng, et al. Formation Flight of Fixed-Wing UAV Swarms: A Group-Based Hierarchical Approach[J]. Chinese Journal of Aeronautics, 2021, 34(2): 504-515.
|
| [19] |
WU Jia, LUO Chunbo, LUO Yang, et al. Distributed UAV Swarm Formation and Collision Avoidance Strategies over Fixed and Switching Topologies[J]. IEEE Transactions on Cybernetics, 2022, 52(10): 10969-10979.
|
| [20] |
XIONG Hui, DING Yaozu, LIU Jinzhen. Compact and Ordered Swarms of Unmanned Aerial Vehicles in Cluttered Environments[J]. Bioinspiration & Biomimetics, 2023, 18(5): 056006.
|