Modern Defense Technology ›› 2026, Vol. 54 ›› Issue (1): 14-29.DOI: 10.3969/j.issn.1009-086x.2026.01.002
• SPECIAL COLUMN • Previous Articles Next Articles
Xucheng CHANG1, Xinhui ZHANG2, Shuailong DANG2, Feng ZHU2, Jingyu WANG2, Gaohan XU2
Received:2025-10-13
Revised:2026-01-04
Online:2026-01-28
Published:2026-02-11
Contact:
Xinhui ZHANG
常绪成1, 张心慧2, 党帅龙2, 朱锋2, 王敬宇2, 徐高涵2
通讯作者:
张心慧
作者简介:常绪成(1983-),男,山东泰安人,副教授,博士,研究方向为多智能体协同控制。
基金资助:CLC Number:
Xucheng CHANG, Xinhui ZHANG, Shuailong DANG, Feng ZHU, Jingyu WANG, Gaohan XU. Research on UAV Path Planning Based on an Improved A*-DWA Hierarchical Fusion Algorithm[J]. Modern Defense Technology, 2026, 54(1): 14-29.
常绪成, 张心慧, 党帅龙, 朱锋, 王敬宇, 徐高涵. 面向无人机路径规划的A*-DWA分层融合算法[J]. 现代防御技术, 2026, 54(1): 14-29.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.xdfyjs.cn/EN/10.3969/j.issn.1009-086x.2026.01.002
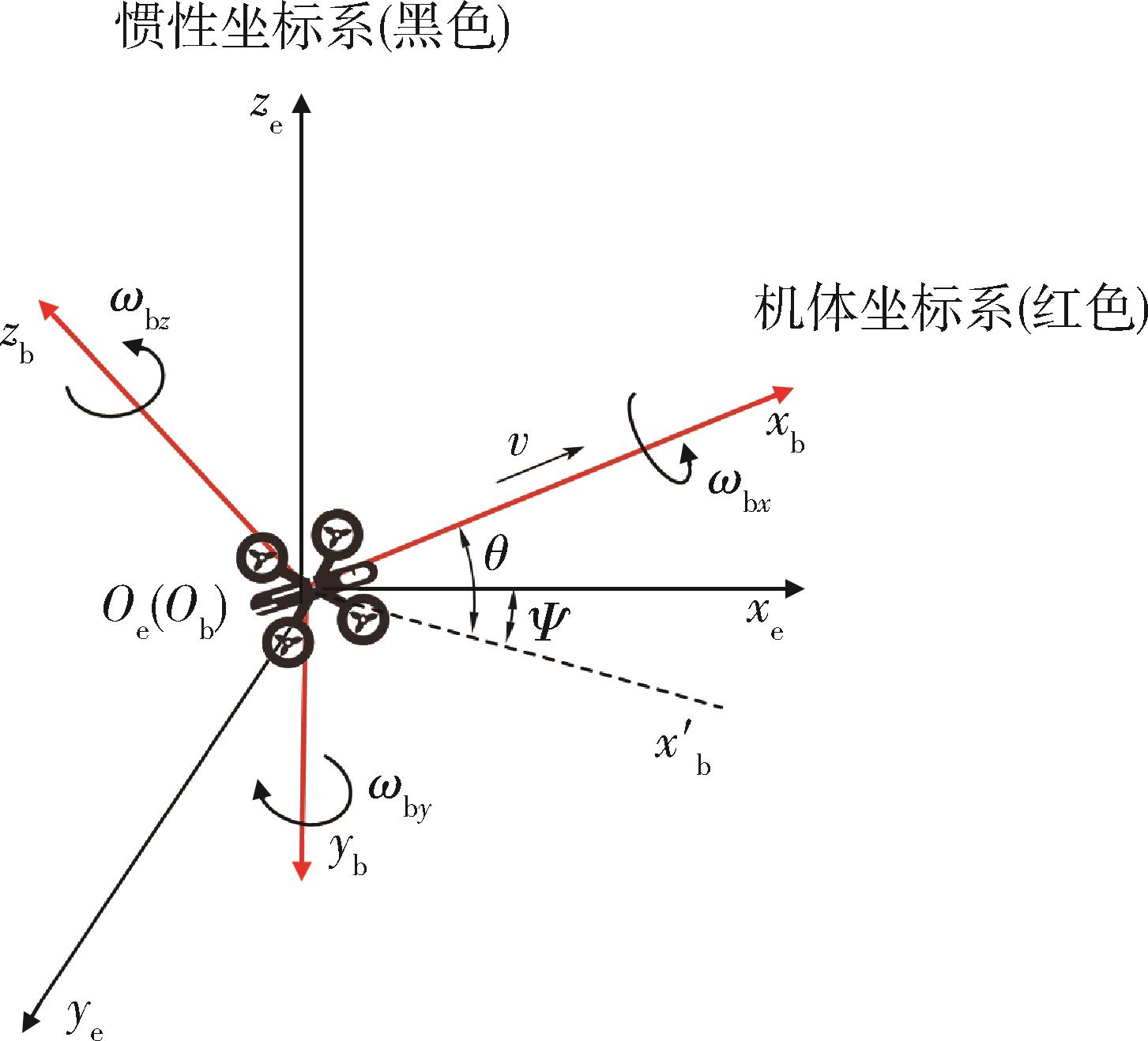
Fig. 1 Kinematic model of unmanned aerial vehicles
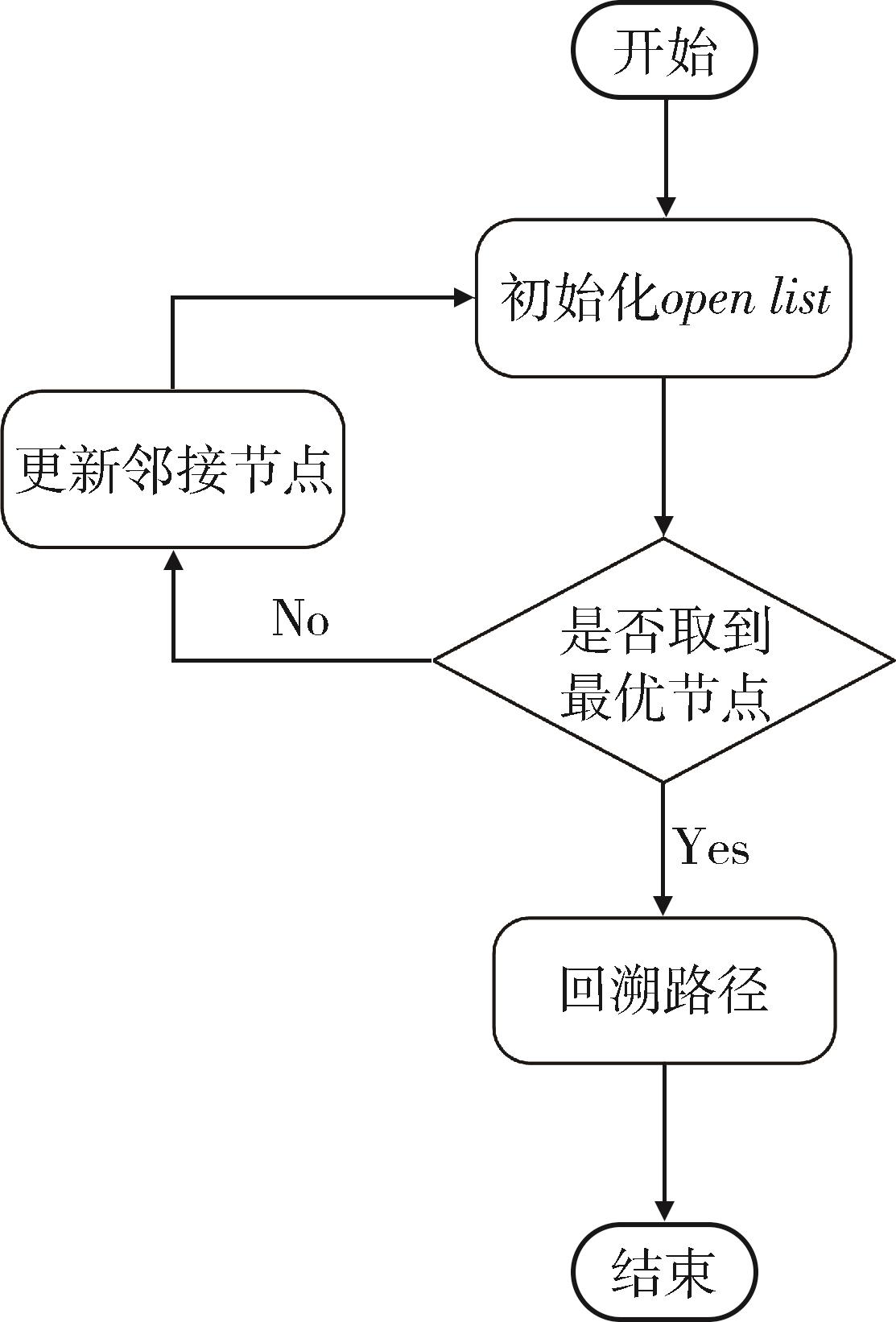
Fig.2 Traditional A* algorithm diagram
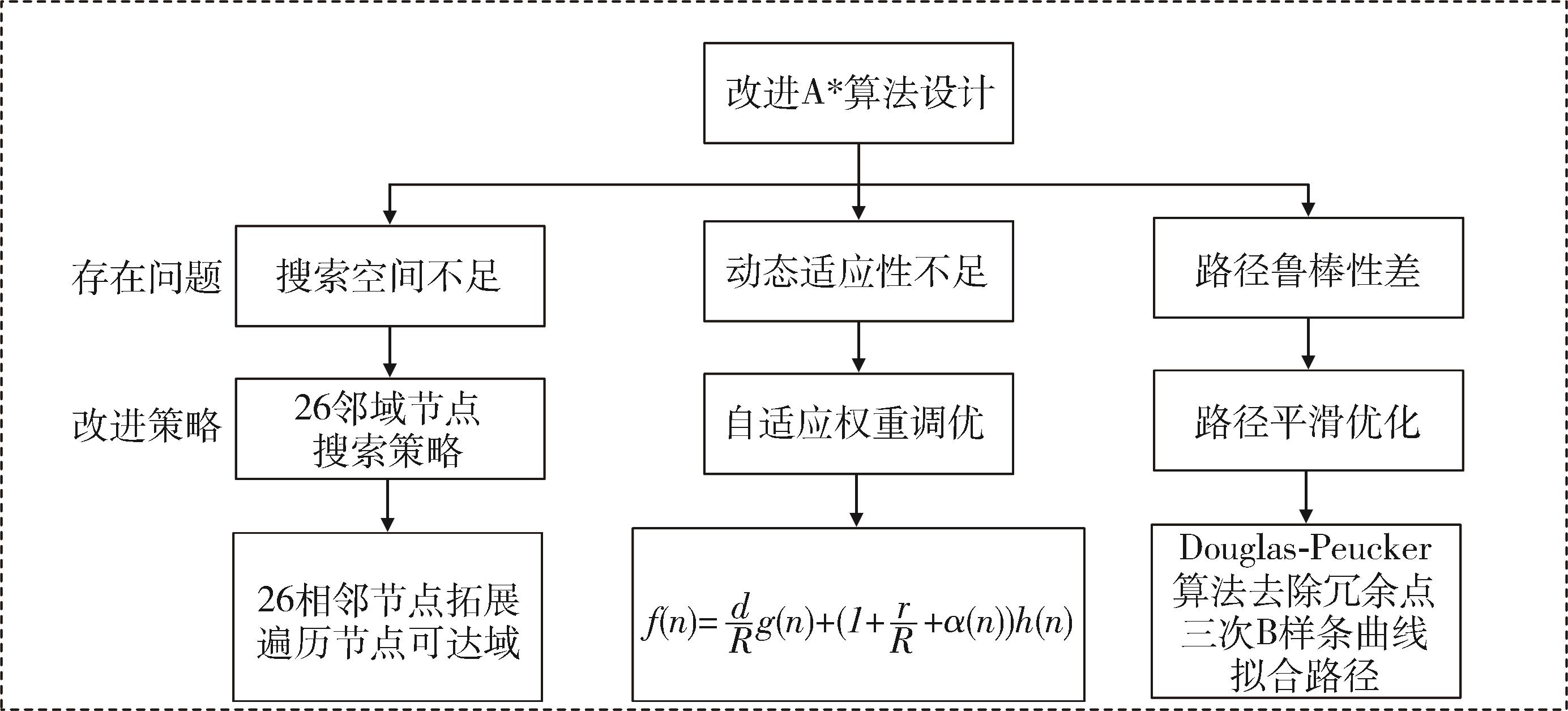
Fig. 3 Diagram for the improved A* algorithm
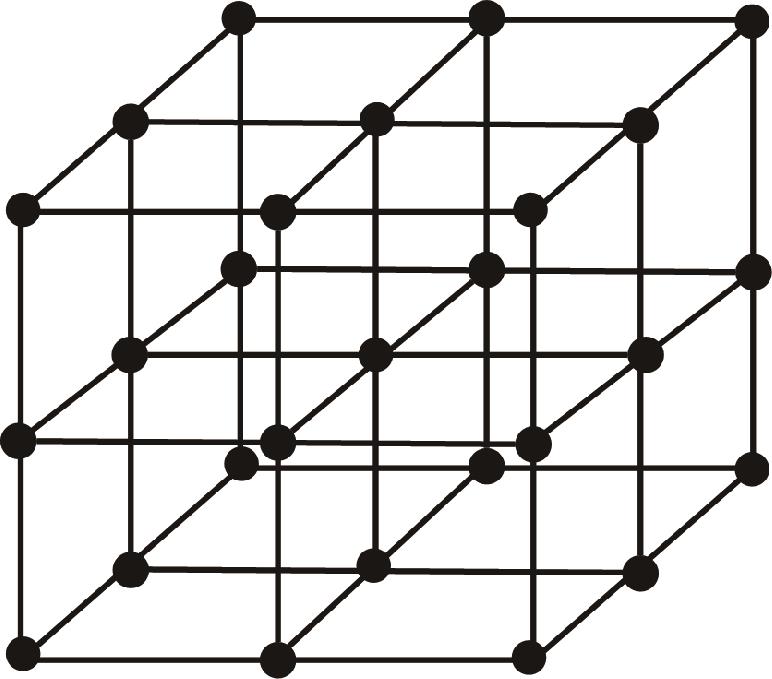
Fig.4 Schematic diagram of 26 adjacent nodes
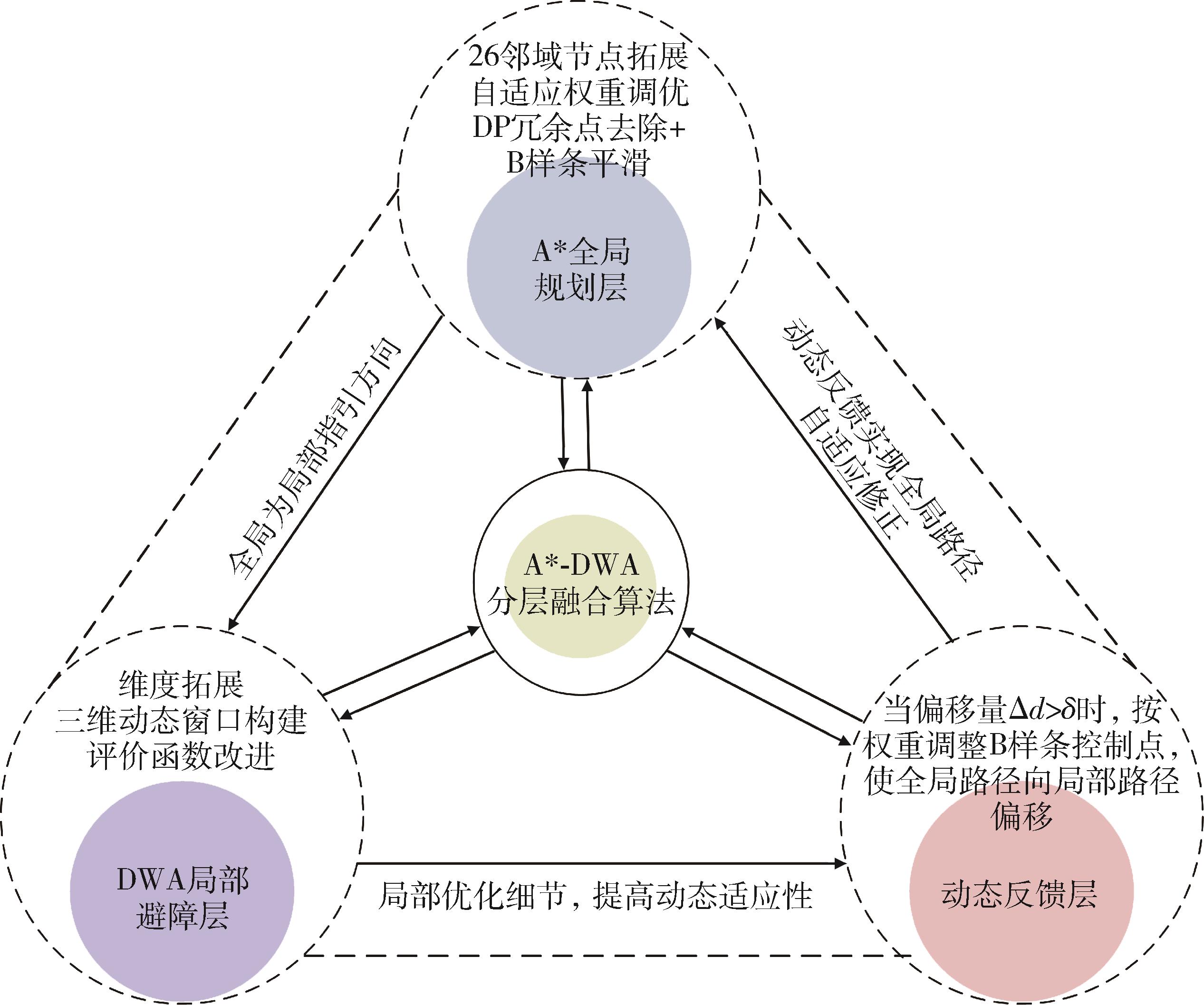
Fig.5 Layered convergence architecture diagram
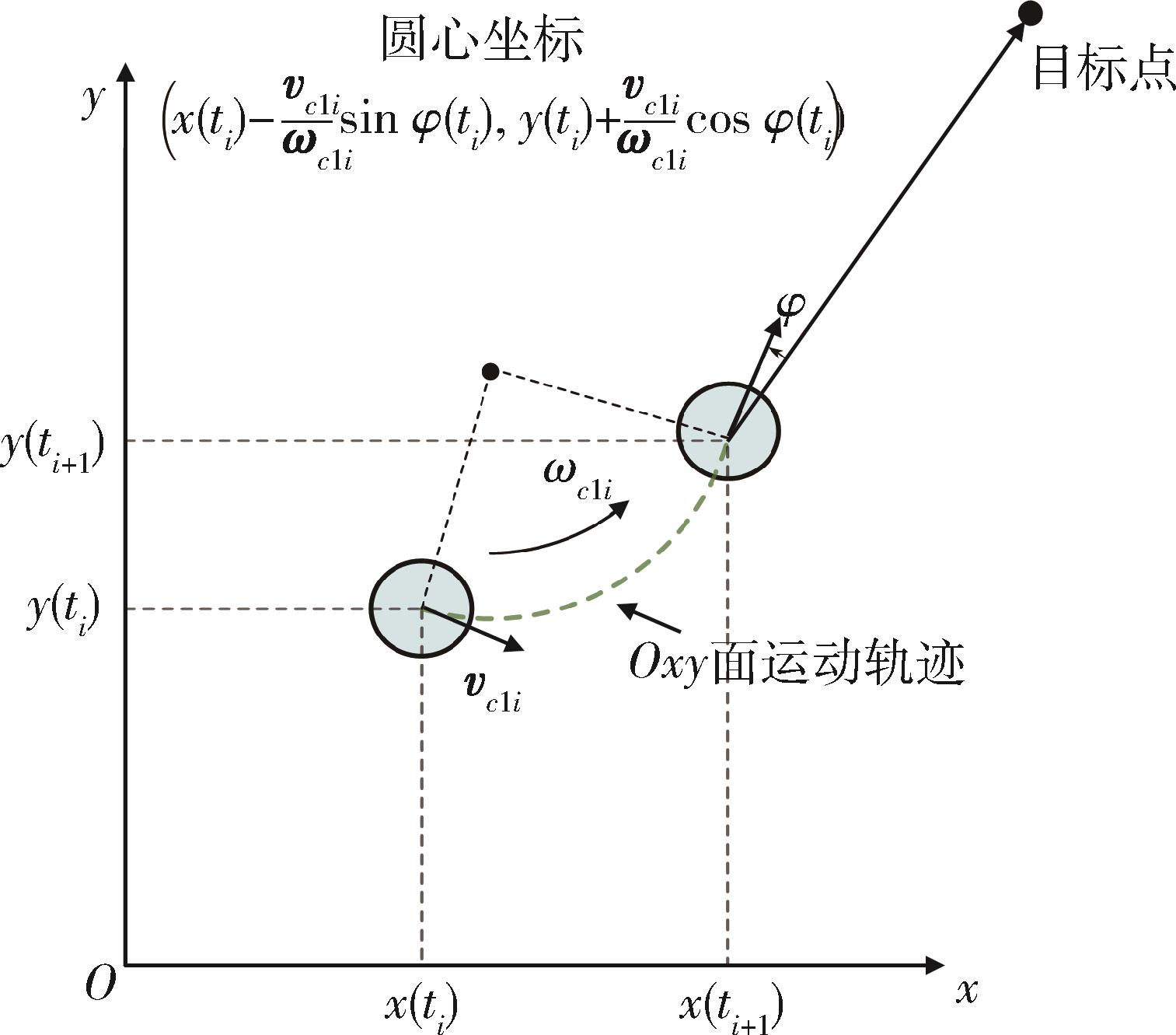
Fig. 6 Drone Oxy Plane Movement Trajectory Diagram
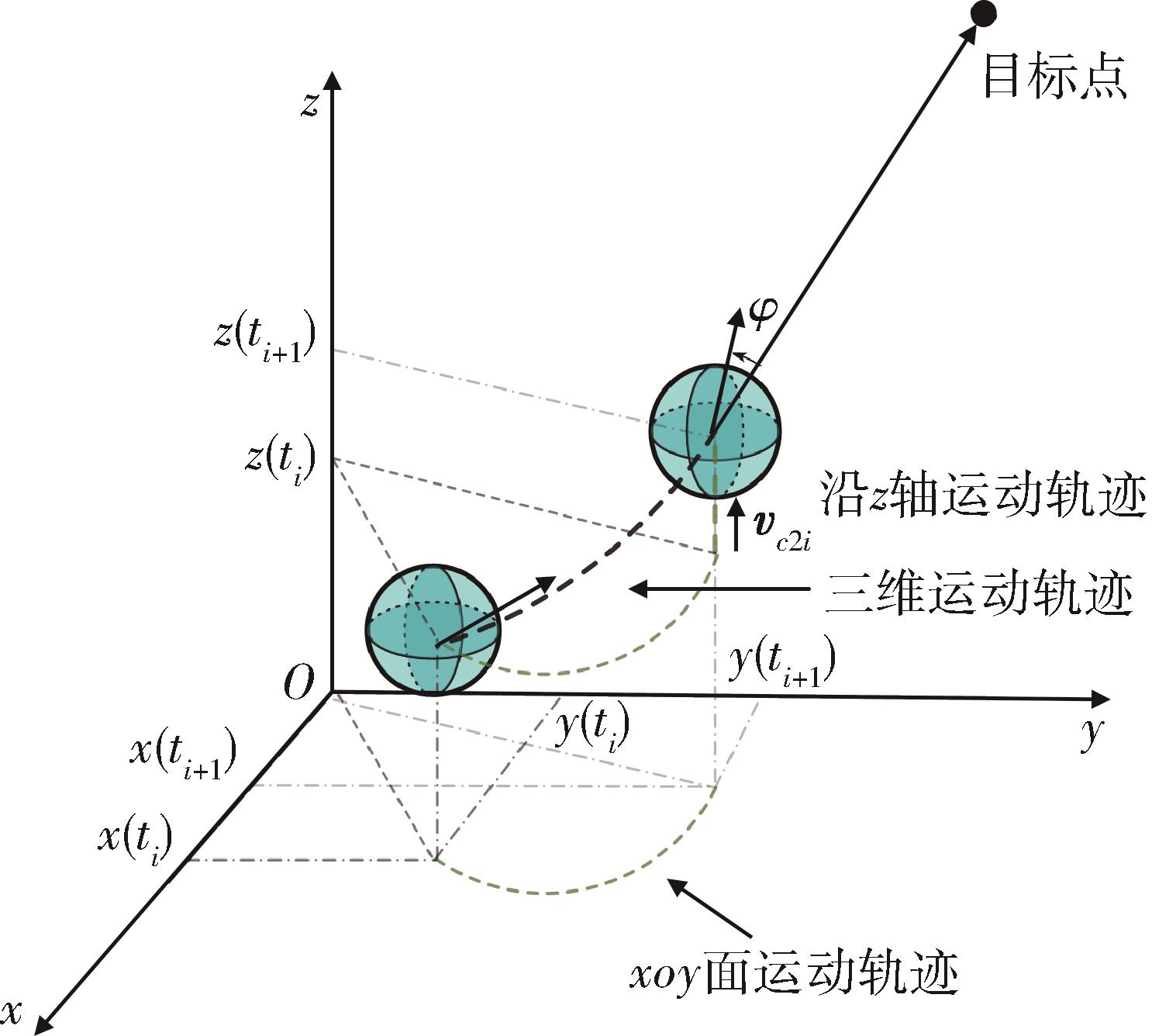
Fig. 7 Composite diagram of a drone’s three-dimensional spatial motion trajectory
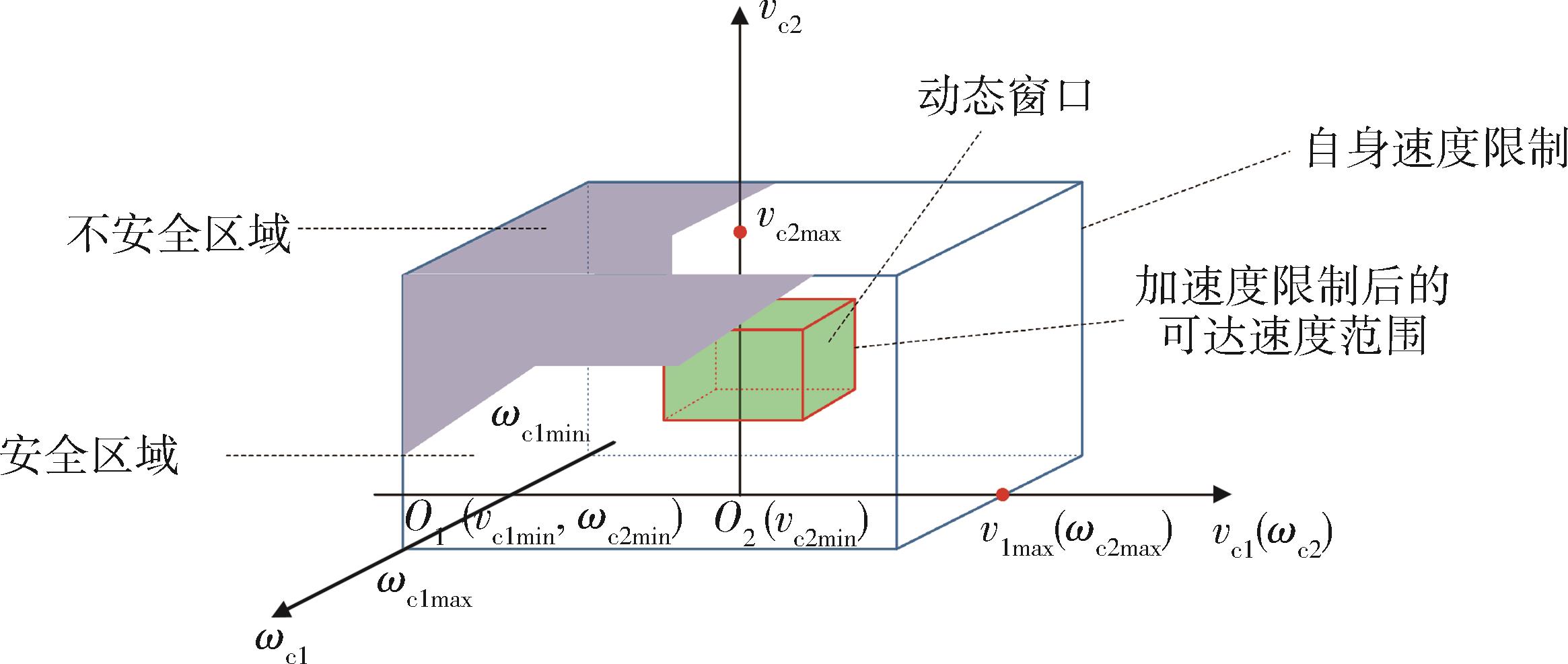
Fig. 8 3D dynamic window diagram
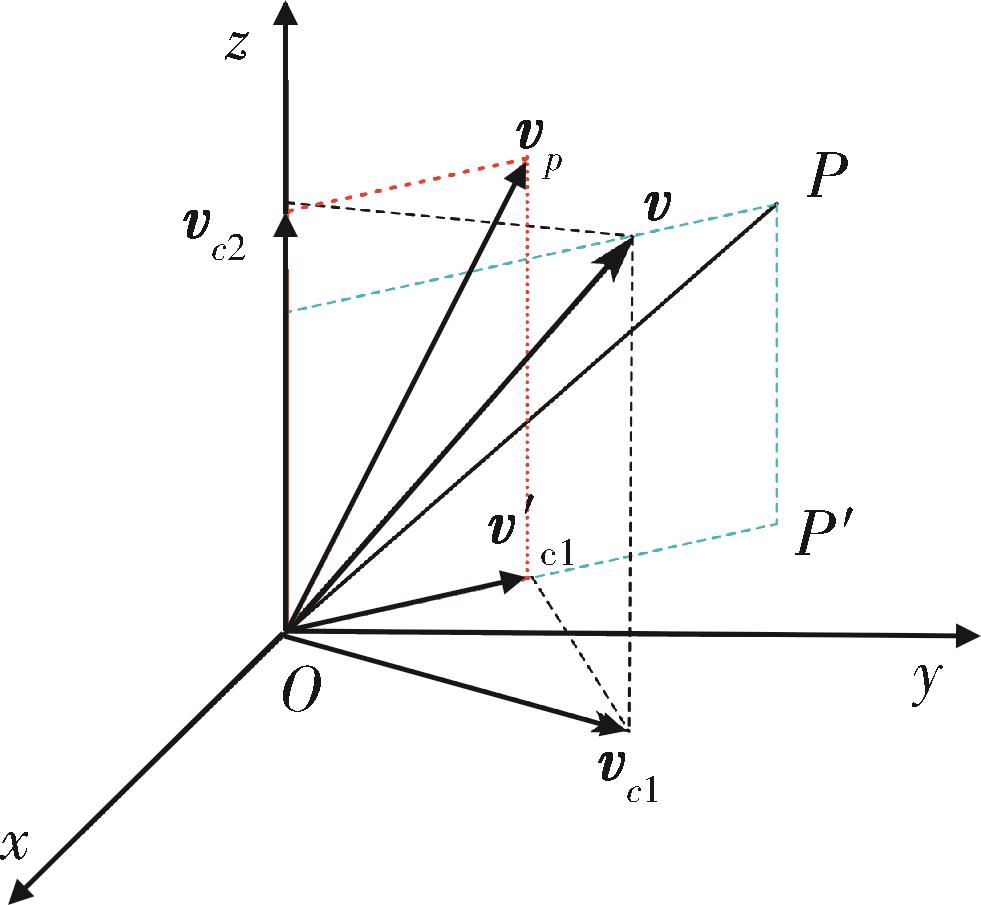
Fig.9 Drone azimuth evaluation item analysis diagram
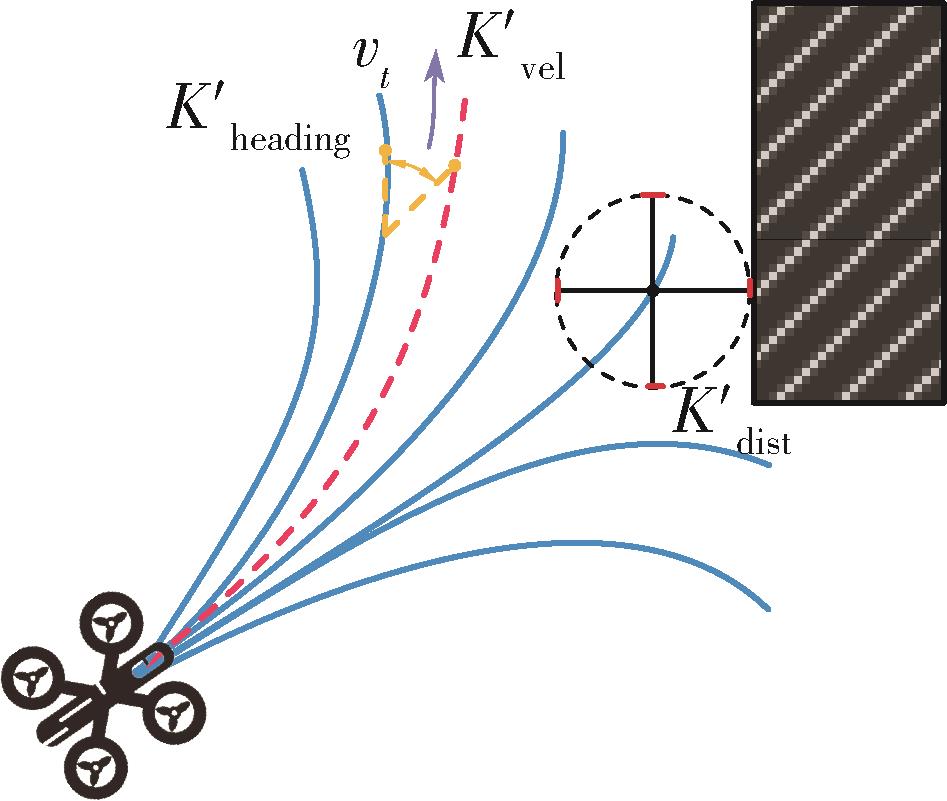
Fig. 10 Improved evaluation function
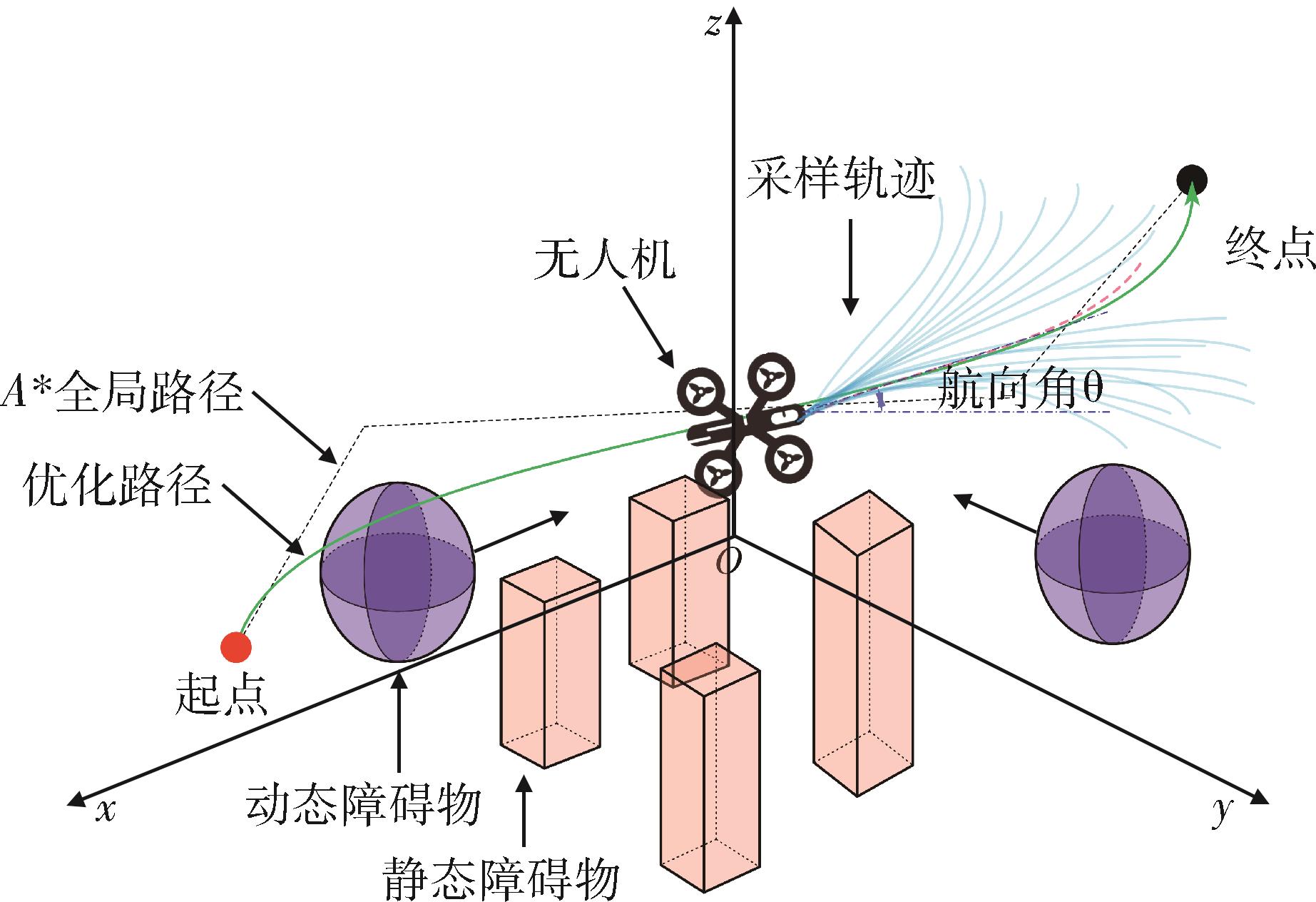
Fig. 11 Schematic diagram of the fusion algorithm for UAV 3D path planning
| 参数 | 值 |
|---|---|
| 单位时间/s | 1 |
| 最大线速度/(m·s-1) | 30 |
| 最大绕θ轴角速度/(rad·s-1) | 60 π/180 |
| 最大绕ϕ轴角速度/(rad·s-1) | 60 π/180 |
| 线速度加速度/(m·s-2) | 50 |
| 绕θ轴角加速度/(rad/s-2) | 60 π/180 |
| 绕ϕ轴角加速度/(rad·s-2) | 60 π/180 |
| 距离阈值/m | 2 |
| 最大威胁距离 | 8 |
| 安全距离 | 4 |
| 偏移阈值 | 10 |
| 调整系数 | 0.5 |
Table 1 Simulation parameter data sheet
| 参数 | 值 |
|---|---|
| 单位时间/s | 1 |
| 最大线速度/(m·s-1) | 30 |
| 最大绕θ轴角速度/(rad·s-1) | 60 π/180 |
| 最大绕ϕ轴角速度/(rad·s-1) | 60 π/180 |
| 线速度加速度/(m·s-2) | 50 |
| 绕θ轴角加速度/(rad/s-2) | 60 π/180 |
| 绕ϕ轴角加速度/(rad·s-2) | 60 π/180 |
| 距离阈值/m | 2 |
| 最大威胁距离 | 8 |
| 安全距离 | 4 |
| 偏移阈值 | 10 |
| 调整系数 | 0.5 |
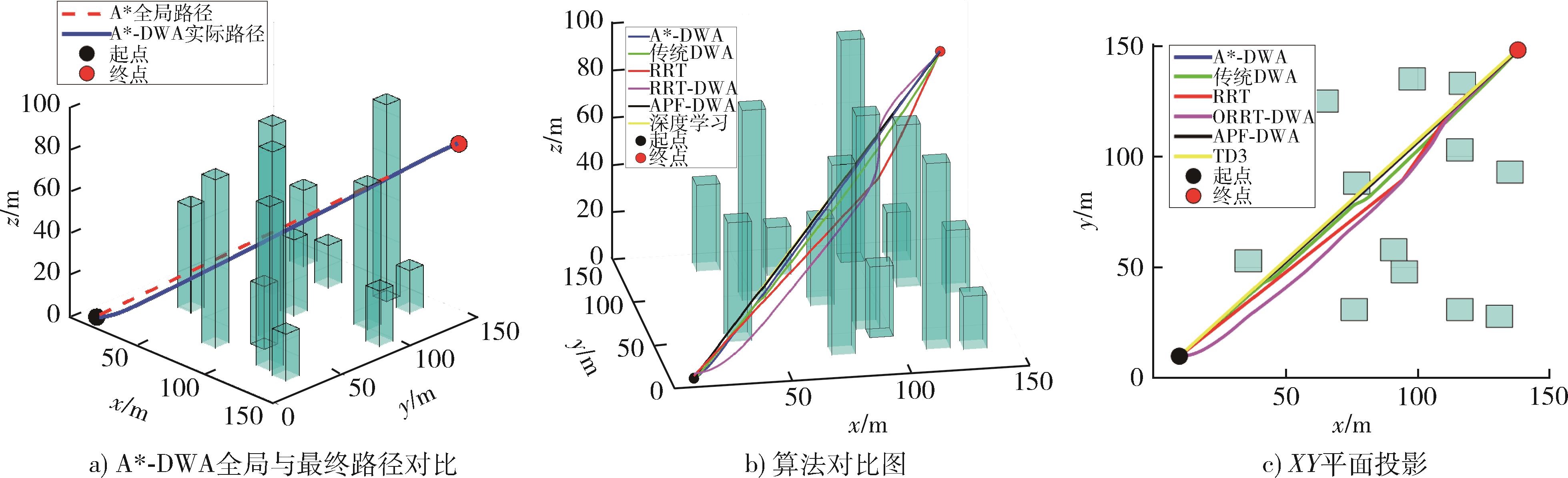
Fig. 12 Comparison diagram of fixed static obstacle path simulation experiments
| 算法类型 | 路径长度/m | 规划时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 202.06±0.52 | 23.63±0.34 | 0.99 | 100 |
| DWA | 204.23±0.43 | 23.76±0.63 | 0.99 | 95 |
| RRT | 209.78±3.40 | 28.08±0.56 | 0.98±0.01 | 85 |
| RRT-DWA | 208.76±2.20 | 27.68±0.58 | 0.98±0.01 | 95 |
| APF-DWA | 210.82±0.58 | 26.13±0.47 | 0.98±0.02 | 90 |
| TD3 | 204.58±1.32 | 27.34±1.16 | 0.99±0.01 | 95 |
Table 2 Experimental data statistics table
| 算法类型 | 路径长度/m | 规划时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 202.06±0.52 | 23.63±0.34 | 0.99 | 100 |
| DWA | 204.23±0.43 | 23.76±0.63 | 0.99 | 95 |
| RRT | 209.78±3.40 | 28.08±0.56 | 0.98±0.01 | 85 |
| RRT-DWA | 208.76±2.20 | 27.68±0.58 | 0.98±0.01 | 95 |
| APF-DWA | 210.82±0.58 | 26.13±0.47 | 0.98±0.02 | 90 |
| TD3 | 204.58±1.32 | 27.34±1.16 | 0.99±0.01 | 95 |
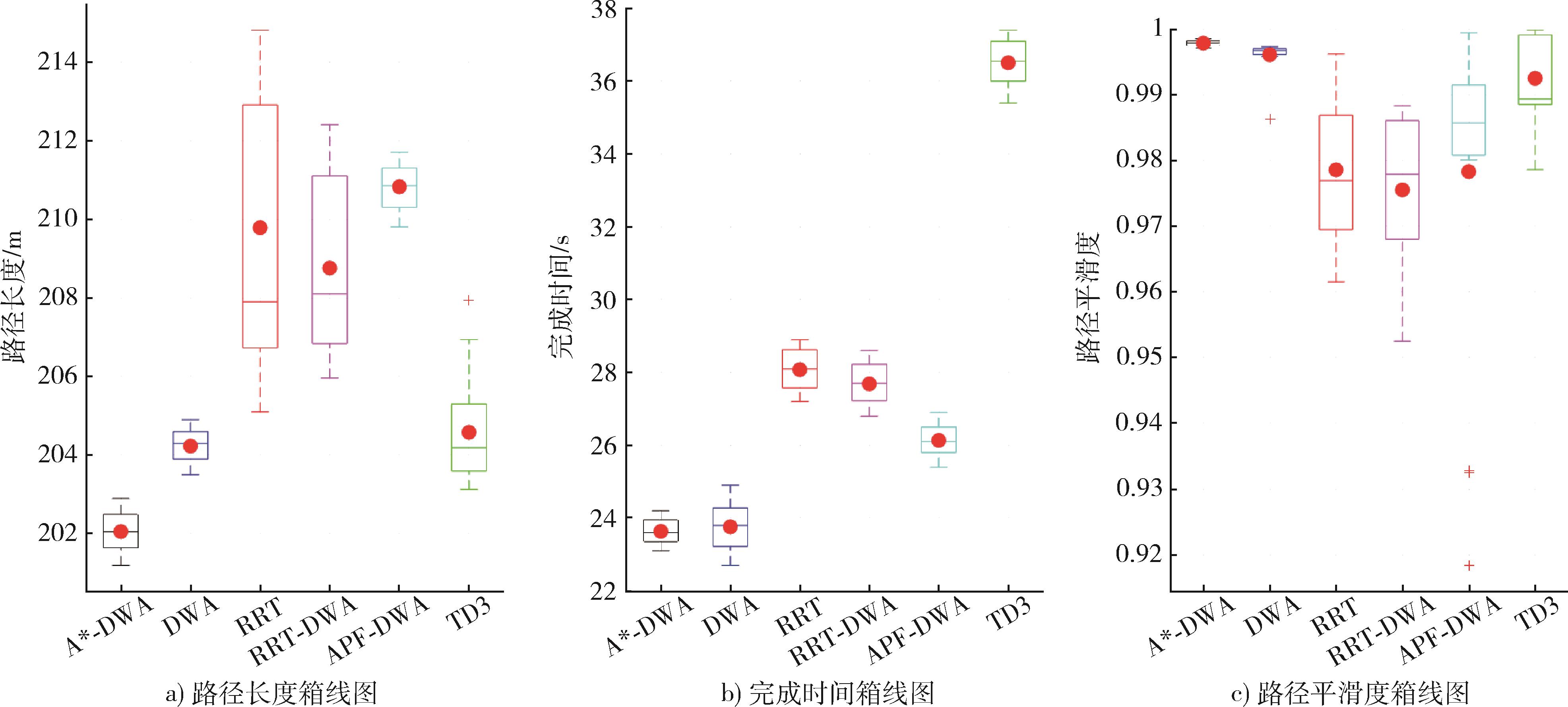
Fig. 13 Indicator Comparison Statistics
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升 | t值 | p值 | d值 | 性能提升/% | |
| DWA | -14.996 | 1.295 1×10-11 | 4.491 | +1.06 | -0.684 | 5.024 0×10-1 | 0.199 | +0.52 |
| RRT | -9.729 | 4.018 7×10-08 | 3.186 | +3.68 | -71.112 | 1.925 7×10-21 | 9.422 | +15.82 |
| RRT-DWA | -13.042 | 1.305 8×10-10 | 4.172 | +3.21 | -66.307 | 5.787 6×10-23 | 8.578 | +14.63 |
| APF-DWA | -58.727 | 4.484 8×10-21 | 15.963 | +4.16 | -32.292 | 1.066 5×10-16 | 6.152 | +9.56 |
| TD3 | -8.143 | 2.867 3×10-7 | 2.454 | +1.23 | -12.849 | 3.511 7×10-10 | 4.356 | +13.55 |
Table 3 Summary table of statistical tests
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升 | t值 | p值 | d值 | 性能提升/% | |
| DWA | -14.996 | 1.295 1×10-11 | 4.491 | +1.06 | -0.684 | 5.024 0×10-1 | 0.199 | +0.52 |
| RRT | -9.729 | 4.018 7×10-08 | 3.186 | +3.68 | -71.112 | 1.925 7×10-21 | 9.422 | +15.82 |
| RRT-DWA | -13.042 | 1.305 8×10-10 | 4.172 | +3.21 | -66.307 | 5.787 6×10-23 | 8.578 | +14.63 |
| APF-DWA | -58.727 | 4.484 8×10-21 | 15.963 | +4.16 | -32.292 | 1.066 5×10-16 | 6.152 | +9.56 |
| TD3 | -8.143 | 2.867 3×10-7 | 2.454 | +1.23 | -12.849 | 3.511 7×10-10 | 4.356 | +13.55 |
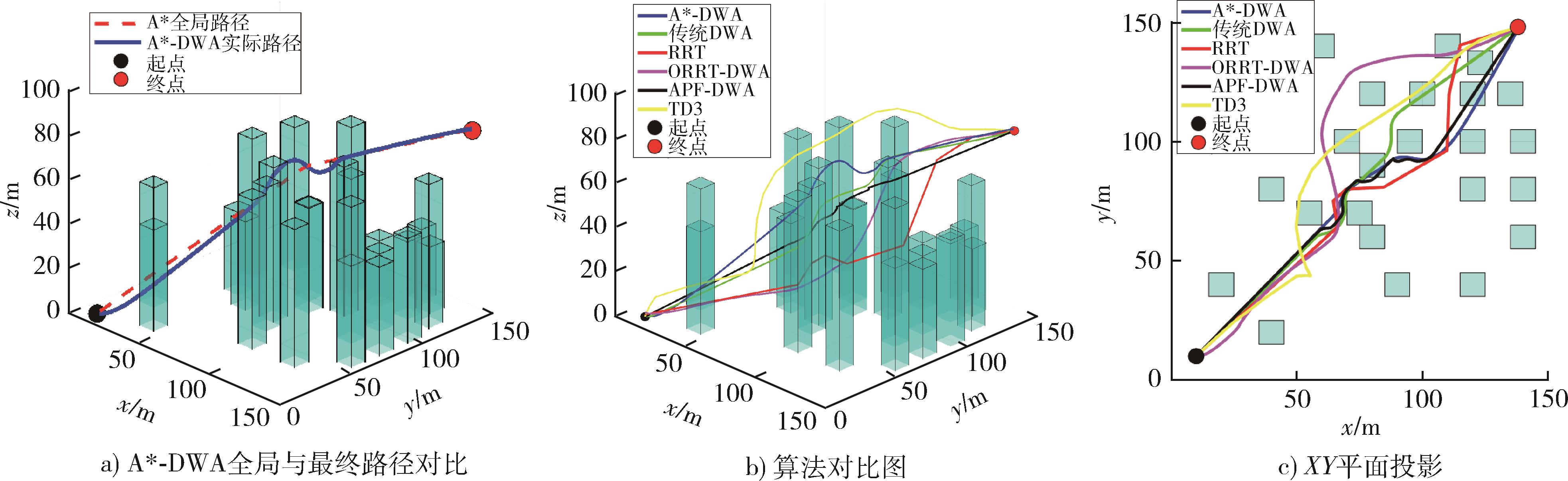
Fig. 14 Comparison diagram of random static obstacle path simulation experiments
| 算法类型 | 路径长度/m | 完成时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 215.55±3.44 | 28.40±2.43 | 0.94±0.02 | 95 |
| DWA | 218.84±5.78 | 42.46±5.29 | 0.92±0.03 | 75 |
| RRT | 227.17±8.92 | 37.36±5.22 | 0.87±0.04 | 85 |
| RRT-DWA | 223.65±7.83 | 40.65±5.82 | 0.91±0.04 | 90 |
| APF-DWA | 220.69±3.93 | 41.43±3.74 | 0.82±0.07 | 85 |
| TD3 | 232.74±8.64 | 39.56±4.94 | 0.84±0.03 | 80 |
Table 4 Experimental data statistics table
| 算法类型 | 路径长度/m | 完成时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 215.55±3.44 | 28.40±2.43 | 0.94±0.02 | 95 |
| DWA | 218.84±5.78 | 42.46±5.29 | 0.92±0.03 | 75 |
| RRT | 227.17±8.92 | 37.36±5.22 | 0.87±0.04 | 85 |
| RRT-DWA | 223.65±7.83 | 40.65±5.82 | 0.91±0.04 | 90 |
| APF-DWA | 220.69±3.93 | 41.43±3.74 | 0.82±0.07 | 85 |
| TD3 | 232.74±8.64 | 39.56±4.94 | 0.84±0.03 | 80 |
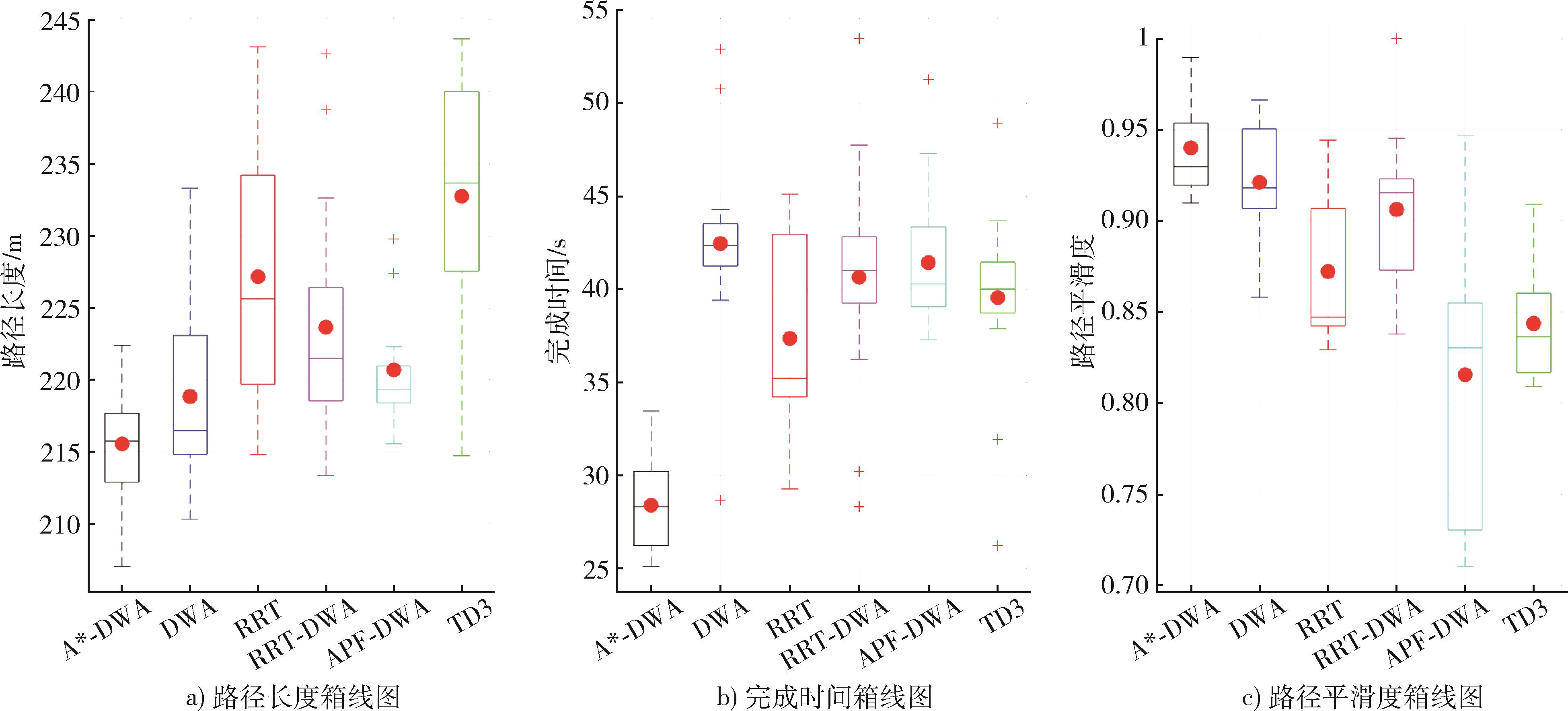
Fig. 15 Indicator comparison statistics
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升 | t值 | p值 | d值 | 性能提升/% | |
| DWA | -1.469 | 1.655 2×10-1 | 0.689 | +1.51 | -9.392 | 3.704 6×10-7 | 3.683 | +33.10 |
| RRT | -4.421 | 4.957 9×10-4 | 1.715 | +5.11 | -8.241 | 3.764 2×10-7 | 2.360 | +23.98 |
| RRT-DWA | -4.265 | 5.233 4×10-4 | 1.295 | +3.62 | -8.374 | 3.048 2e×10-7 | 2.685 | +30.13 |
| APF-DWA | -5.410 | 5.784 7×10-5 | 1.396 | +2.33 | -15.133 | 1.714 3×10-10 | 4.347 | +31.45 |
| TD3 | -6.668 | 1.065 3×10-5 | 2.550 | +7.39 | -6.875 | 7.624 ×10-6 | 2.811 | +28.19 |
Table 5 Summary table of statistical tests
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升 | t值 | p值 | d值 | 性能提升/% | |
| DWA | -1.469 | 1.655 2×10-1 | 0.689 | +1.51 | -9.392 | 3.704 6×10-7 | 3.683 | +33.10 |
| RRT | -4.421 | 4.957 9×10-4 | 1.715 | +5.11 | -8.241 | 3.764 2×10-7 | 2.360 | +23.98 |
| RRT-DWA | -4.265 | 5.233 4×10-4 | 1.295 | +3.62 | -8.374 | 3.048 2e×10-7 | 2.685 | +30.13 |
| APF-DWA | -5.410 | 5.784 7×10-5 | 1.396 | +2.33 | -15.133 | 1.714 3×10-10 | 4.347 | +31.45 |
| TD3 | -6.668 | 1.065 3×10-5 | 2.550 | +7.39 | -6.875 | 7.624 ×10-6 | 2.811 | +28.19 |
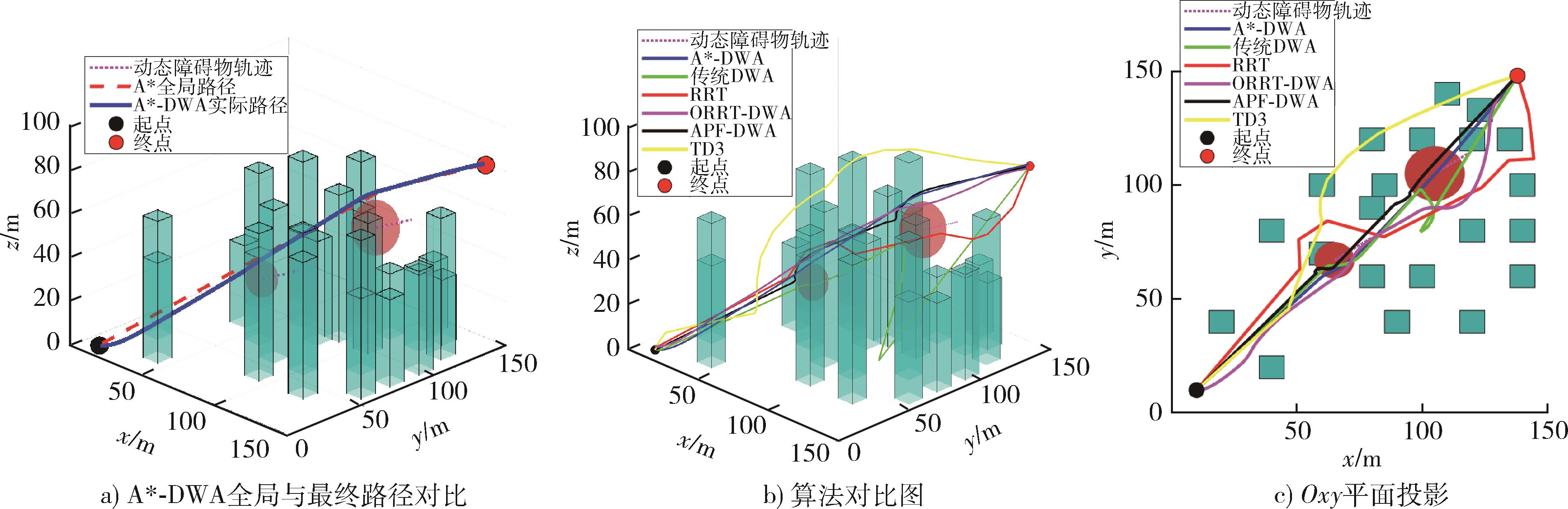
Fig. 16 Dynamic obstacle path simulation comparison diagram
| 算法类型 | 路径长度/m | 规划时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 219.01±6.21 | 28.50±2.26 | 0.94±0.03 | 90 |
| DWA | 250.83±28.31 | 42.55±5.48 | 0.89±0.08 | 65 |
| RRT | 230.27±11.17 | 37.35±5.52 | 0.85±0.03 | 70 |
| RRT-DWA | 221.03±5.56 | 39.41±4.73 | 0.89±0.06 | 80 |
| APF-DWA | 220.46±4.49 | 42.72±3.54 | 0.82±0.06 | 75 |
| TD3 | 233.11±8.22 | 39.79±5.45 | 0.82±0.04 | 70 |
Table 6 Experimental data statistics table
| 算法类型 | 路径长度/m | 规划时间/s | 路径光滑度 | 避障成功率/% |
|---|---|---|---|---|
| A*-DWA | 219.01±6.21 | 28.50±2.26 | 0.94±0.03 | 90 |
| DWA | 250.83±28.31 | 42.55±5.48 | 0.89±0.08 | 65 |
| RRT | 230.27±11.17 | 37.35±5.52 | 0.85±0.03 | 70 |
| RRT-DWA | 221.03±5.56 | 39.41±4.73 | 0.89±0.06 | 80 |
| APF-DWA | 220.46±4.49 | 42.72±3.54 | 0.82±0.06 | 75 |
| TD3 | 233.11±8.22 | 39.79±5.45 | 0.82±0.04 | 70 |
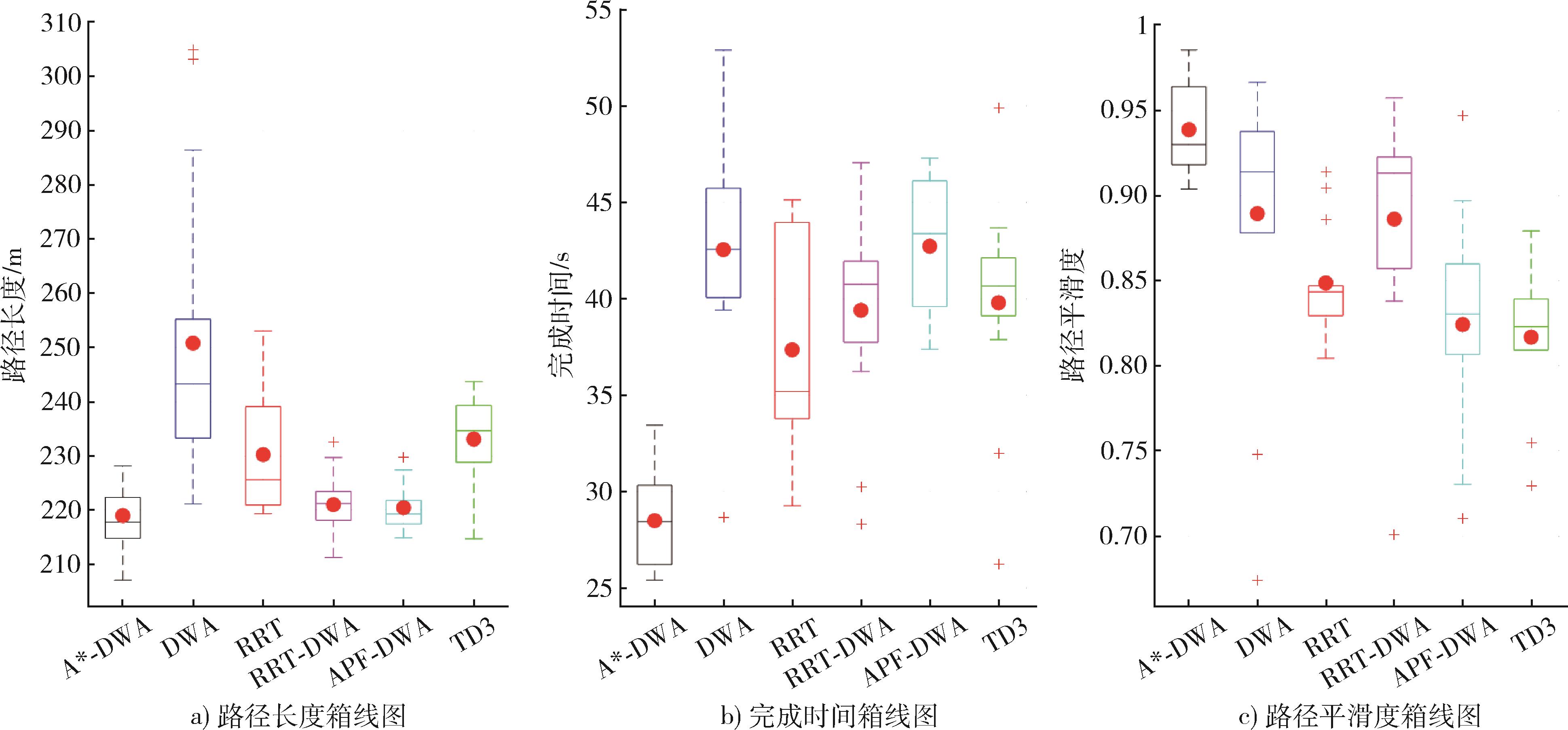
Fig.17 Indicator comparison statistics
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升/% | t值 | p值 | d值 | 性能提升/% | |
| DWA | -3.745 | 3.235 5×10-3 | 1.575 | +12.69 | -10.279 | 5.610 3×10-7 | 3.671 | +33.01 |
| RRT | -3.352 | 6.450 4×10-3 | 1.282 | +4.89 | -6.278 | 4.077 7×10-5 | 2.178 | +23.70 |
| RRT-DWA | -1.068 | 3.025 0×10-1 | 0.402 | +0.91 | -8.448 | 7.218 0×10-7 | 2.809 | +27.68 |
| APF-DWA | -1.547 | 1.459 6×10-1 | 0.425 | +0.66 | -14.159 | 7.506 6×10-9 | 5.133 | +33.29 |
| TD3 | -3.923 | 2.379 5×10-3 | 1.628 | +6.05 | -5.878 | 1.064 6×10-4 | 2.669 | +28.38 |
Table 7 Summary Table of Statistical Tests
与A*-DWA 对比算法 | 路径长度 | 规划时间 | ||||||
|---|---|---|---|---|---|---|---|---|
| t值 | p值 | d值 | 性能提升/% | t值 | p值 | d值 | 性能提升/% | |
| DWA | -3.745 | 3.235 5×10-3 | 1.575 | +12.69 | -10.279 | 5.610 3×10-7 | 3.671 | +33.01 |
| RRT | -3.352 | 6.450 4×10-3 | 1.282 | +4.89 | -6.278 | 4.077 7×10-5 | 2.178 | +23.70 |
| RRT-DWA | -1.068 | 3.025 0×10-1 | 0.402 | +0.91 | -8.448 | 7.218 0×10-7 | 2.809 | +27.68 |
| APF-DWA | -1.547 | 1.459 6×10-1 | 0.425 | +0.66 | -14.159 | 7.506 6×10-9 | 5.133 | +33.29 |
| TD3 | -3.923 | 2.379 5×10-3 | 1.628 | +6.05 | -5.878 | 1.064 6×10-4 | 2.669 | +28.38 |
| [1] | MOHSAN S A H, OTHMAN N Q H, LI Yanlong, et al. Unmanned Aerial Vehicles (UAVs): Practical Aspects, Applications, Open Challenges, Security Issues, and Future Trends[J]. Intelligent Service Robotics, 2023, 16(1): 109-137. |
| [2] | MOHSAN S A H, KHAN M A, NOOR F, et al. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review[J]. Drones, 2022, 6(6): 147. |
| [3] | SHAKHATREH H, SAWALMEH A H, AL-FUQAHA A, et al. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges[J]. IEEE Access, 2019, 7: 48572-48634. |
| [4] | PATLE B K, BABU L G, PANDEY A, et al. A Review: On Path Planning Strategies for Navigation of Mobile Robot[J]. Defence Technology, 2019, 15(4): 582-606. |
| [5] | DE FILIPPIS L, GUGLIERI G, QUAGLIOTTI F. Path Planning Strategies for UAVS in 3D Environments[J]. Journal of Intelligent & Robotic Systems, 2012, 65(1): 247-264. |
| [6] | ZAFAR M N, MOHANTA J C. Methodology for Path Planning and Optimization of Mobile Robots: A Review[J]. Procedia Computer Science, 2018, 133: 141-152. |
| [7] | 康凯深, 黄海龙. 基于改进的A*算法的复杂环境下路径规划研究[J]. 机械传动, 2025, 49(7): 22-30. |
| KANG Kaishen, HUANG Hailong. Research on Path Planning in Complex Environment Based on Improved A* Algorithm[J]. Journal of Mechanical Transmission, 2025, 49(7): 22-30. | |
| [8] | 翟文鹏, 刘润南, 朱承元. 基于改进Dijkstra算法的滑行路径优化[J]. 中国民航大学学报, 2022, 40(1): 1-6. |
| ZHAI Wenpeng, LIU Runnan, ZHU Chengyuan. Optimization of Taxiway Based on Improved Dijkstra Algorithm[J]. Journal of Civil Aviation University of China, 2022, 40(1): 1-6. | |
| [9] | 杨大庆, 谷侃锋. 基于快速扩展随机树的机械臂路径优化算法研究[J]. 组合机床与自动化加工技术, 2021(5): 10-12, 17. |
| YANG Daqing, GU Kanfeng. Research on Path Optimization Algorithm of Manipulator Based on Fast Expanding Random Tree in Obstacle Environment[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(5): 10-12, 17. | |
| [10] | 贾千禧, 赵旭, 蒙志君. 基于改进DWA的动态环境路径规划算法[J]. 科学技术与工程, 2024, 24(15): 6313-6319. |
| JIA Qianxi, ZHAO Xu, MENG Zhijun. Path Planning Algorithm in Dynamic Environment Based on Improved Dynamic Window Approach[J]. Science Technology and Engineering, 2024, 24(15): 6313-6319. | |
| [11] | 张弛, 魏巍. 基于改进人工势场法的移动机器人路径规划[J]. 系统仿真学报, 2025, 37(11): 2918-2926. |
| ZHANG Chi, WEI Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm[J]. Journal of System Simulation, 2025, 37(11): 2918-2926. | |
| [12] | QURESHI A H, AYAZ Y. Intelligent Bidirectional Rapidly-Exploring Random Trees for Optimal Motion Planning in Complex Cluttered Environments[J]. Robotics and Autonomous Systems, 2015, 68: 1-11. |
| [13] | AGIRREBEITIA J, AVILÉS R, DE BUSTOS I F, et al. A New APF Strategy for Path Planning in Environments with Obstacles[J]. Mechanism and Machine Theory, 2005, 40(6): 645-658. |
| [14] | 孙岩霆, 王荣杰, 蒋德松. 融合A*与DWA算法的水面船艇动态路径规划[J]. 仪器仪表学报, 2024, 45(1): 301-310. |
| SUN Yanting, WANG Rongjie, JIANG Desong. Dynamic Path Planning of Surface Ship by Combining A* and Dynamic Window Algorithm[J]. Chinese Journal of Scientific Instrument, 2024, 45(1): 301-310. | |
| [15] | BAI Xiong, JIANG Haikun, CUI Junjie, et al. UAV Path Planning Based on Improved A∗ and DWA Algorithms[J]. International Journal of Aerospace Engineering, 2021, 2021(1): 4511252. |
| [16] | SANG Wenpeng, YUE Yaoshun, ZHAI Kaiwei, et al. Research on AGV Path Planning Integrating an Improved A* Algorithm and DWA Algorithm[J]. Applied Sciences, 2024, 14(17): 7551. |
| [17] | 贺勇, 侯体成, 曾子望. 融合改进A*和动态窗口法的无人机路径规划[J]. 机械科学与技术, 2025, 44(9): 1668-1676. |
| HE Yong, HOU Ticheng, ZENG Ziwang. UAV Path Planning Algorithm Based on Improved A* and Dynamic Window Approach[J]. Mechanical Science and Technology for Aerospace Engineering, 2025, 44(9): 1668-1676. | |
| [18] | YANG Haixu, XU Xiaoming, HONG Jichao. Automatic Parking Path Planning of Tracked Vehicle Based on Improved A* and DWA Algorithms[J]. IEEE Transactions on Transportation Electrification, 2023, 9(1): 283-292. |
| [19] | CHANG Xucheng, WANG Jingyu, LI Kang, et al. Design of UAV Fusion Obstacle Avoidance Algorithm Based on DWA Algorithm[C]∥Proceedings of 4th 2024 International Conference on Autonomous Unmanned Systems (4th ICAUS 2024). Singapore: Springer Nature Singapore, 2025: 521-533. |
| [20] | ZHONG Xunyu, TIAN Jun, HU Huosheng, et al. Hybrid Path Planning Based on Safe A* Algorithm and Adaptive Window Approach for Mobile Robot in Large-Scale Dynamic Environment[J]. Journal of Intelligent & Robotic Systems, 2020, 99(1): 65-77. |
| [21] | CAO Liling, TANG Lei, CAO Shouqi, et al. Smooth Optimised A*-Guided DWA for Mobile Robot Path Planning[J]. Applied Sciences, 2025, 15(13): 6956. |
| [22] | AHMAD F, KUMAR P, PATIL P P. Modeling and Simulation of a Quadcopter UAV[J]. Nonlinear Studies, 2018, 25(2): 287-299. |
| [23] | 李昱东. 基于RRT-DWA算法的无人机三维动态航迹规划方法研究[D]. 成都: 电子科技大学, 2024. |
| LI Yudong. Research on Three-Dimensional Dynamic Trajectory Planning Method for UAV Based on RRT-DWA Algorithm[D]. Chengdu: University of Electronic Science and Technology of China, 2024. | |
| [24] | CHANG Xucheng, WANG Jingyu, LI Kang, et al. Research on Multi-UAV Autonomous Obstacle Avoidance Algorithm Integrating Improved Dynamic Window Approach and ORCA[J]. Scientific Reports, 2025, 15(1): 14646. |
| [25] | FOX D, BURGARD W, THRUN S. The Dynamic Window Approach to Collision Avoidance[J]. IEEE Robotics & Automation Magazine, 1997, 4(1): 23-33. |
| [26] | CHEN Jiagui, ZHAO Yun, XU Xing. Improved RRT-Connect Based Path Planning Algorithm for Mobile Robots[J]. IEEE Access, 2021, 9: 145988-145999. |
| [27] | WU Yuhang, WANG Qiang, XIAO Yao, et al. Path Planning of Quadruped Robot for Urban Natural Gas Pipe Leakage Inspection Based on Optimized RRT* and DWA Algorithms[J]. International Journal of Metrology and Quality Engineering, 2024, 15: 18. |
| [28] | HU Jinwen, CHENG Changwei, WANG Ce, et al. An Improved Artificial Potential Field Method Based on DWA and Path Optimization[C]∥2019 IEEE International Conference on Unmanned Systems (ICUS). Piscataway: IEEE, 2019: 809-814. |
| [29] | LI Peng, WANG Yuchen, GAO Zhenyan. Path Planning of Mobile Robot Based on Improved TD3 Algorithm[C]∥2022 IEEE International Conference on Mechatronics and Automation (ICMA). Piscataway: IEEE, 2022: 715-720. |
| [1] | Xiaowen CHEN, Qing YANG, Junmin WANG. Survival Strategies for Unmanned Aerial Vehicle Systems Under Strong Denial Conditions [J]. Modern Defense Technology, 2026, 54(1): 1-13. |
| [2] | Xuejian FENG, Yifei LI, Yiqi TONG, Yanjin ZHANG. An Improved ARA*-Based Path Planning Algorithm for UAV [J]. Modern Defense Technology, 2025, 53(6): 101-110. |
| [3] | Junbiao ZHANG, Jing WU, Fei ZHAO, Li FANG. Application and Enlightenment of UAV in the Russia-Ukraine Conflict [J]. Modern Defense Technology, 2025, 53(6): 37-45. |
| [4] | Hongxin LI, Xiaojia ZHAO, Zhenxin HONG, Lifeng GAN, Guoxu FENG. Optimization Method for Cost Reduction in Design and Development of Unmanned Aerial Vehicles [J]. Modern Defense Technology, 2025, 53(5): 11-20. |
| [5] | Zhenhan WEI, Hui TANG, Yu YANG, Zhihong LIAO, Qihui LAI, Chen LU. Multi-UAV Path Planning Based on Reinforcement Learning [J]. Modern Defense Technology, 2025, 53(5): 136-144. |
| [6] | Qing CHEN, Chun ZHOU, Xinjun LIU, Ruijun LUO. Stationary Finite-time Formation Control of UAVs Under Bearing Constraints [J]. Modern Defense Technology, 2025, 53(5): 197-205. |
| [7] | Nan LIU. UAV Swarm Threat Assessment Method Based on Improved PROMETHEE [J]. Modern Defense Technology, 2025, 53(5): 92-98. |
| [8] | Jiaheng TANG, Boyi XIAO, Chenbo DING, Hengzhi FAN, Maolong LÜ. Research on Target Allocation and Path Planning Methods for Manned/Unmanned Aerial Vehicle Cooperative Ground Attack [J]. Modern Defense Technology, 2025, 53(4): 27-35. |
| [9] | Wenbiao HE, Yongjiang HU, Wenguang LI. Review of Optimization Algorithms for UAV Routes [J]. Modern Defense Technology, 2024, 52(4): 24-32. |
| [10] | Zonghui WANG, Yunjun YANG, Hongrui ZHAO, Jiaxiang ZHAO. Numerical Simulation of Tilting Wing and Rotor UAV During Transition Flight [J]. Modern Defense Technology, 2024, 52(3): 9-19. |
| [11] | Jingyu HE, Jizheng LIU, Zhichen YANG, Dongdong WANG, Ping OU. Development and Testing of Multi Rotor Unmanned Aerial Vehicle Noise Source Tracking and Positioning System [J]. Modern Defense Technology, 2024, 52(3): 1-8. |
| [12] | Ruijie WANG, Dechao WANG, Lu FENG, Zhengdang ZHAO, Zheliang CHEN. Research Progress and Countermeasures Against UAV Swarm Operations Abroad [J]. Modern Defense Technology, 2023, 51(4): 1-9. |
| [13] | Biyan LI, Shun HU. Formation Control of UAV Swarm with Bearing-Only Measurements [J]. Modern Defense Technology, 2023, 51(2): 55-61. |
| [14] | Zhan-fu SONG, Quan-xi ZHAO, Wen-zhi HU, Yi HUANG. Research on UAV Supporting Ground Air Defense Operations [J]. Modern Defense Technology, 2022, 50(5): 22-27. |
| [15] | Kang-sheng DONG, Wei-bo HU, Yan-ming SHEN, Shang-qin TANG. Development and Implications of Intelligent Unmanned Combat Aerial Equipment by the US Army [J]. Modern Defense Technology, 2022, 50(4): 28-37. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||


