Modern Defense Technology ›› 2025, Vol. 53 ›› Issue (1): 1-10.DOI: 10.3969/j.issn.1009-086x.2025.01.001
• SPECIAL COLUMN • Next Articles
Chen FEI, Liang ZHAO, Yongliang HE, Yincheng LI, Song XU
Received:2024-07-08
Revised:2025-01-22
Online:2025-02-28
Published:2025-02-27
Contact:
Yongliang HE
通讯作者:
贺拥亮
作者简介:费陈(1994-),男,安徽芜湖人。讲师,硕士,研究方向为无人集群,强化学习,机器学习,无线通信。
基金资助:CLC Number:
Chen FEI, Liang ZHAO, Yongliang HE, Yincheng LI, Song XU. Trajectory Planning for UAV Swarm Target Strikes in Urban Environments[J]. Modern Defense Technology, 2025, 53(1): 1-10.
费陈, 赵亮, 贺拥亮, 李银城, 徐嵩. 城市环境下无人机群目标打击航迹规划[J]. 现代防御技术, 2025, 53(1): 1-10.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.xdfyjs.cn/EN/10.3969/j.issn.1009-086x.2025.01.001
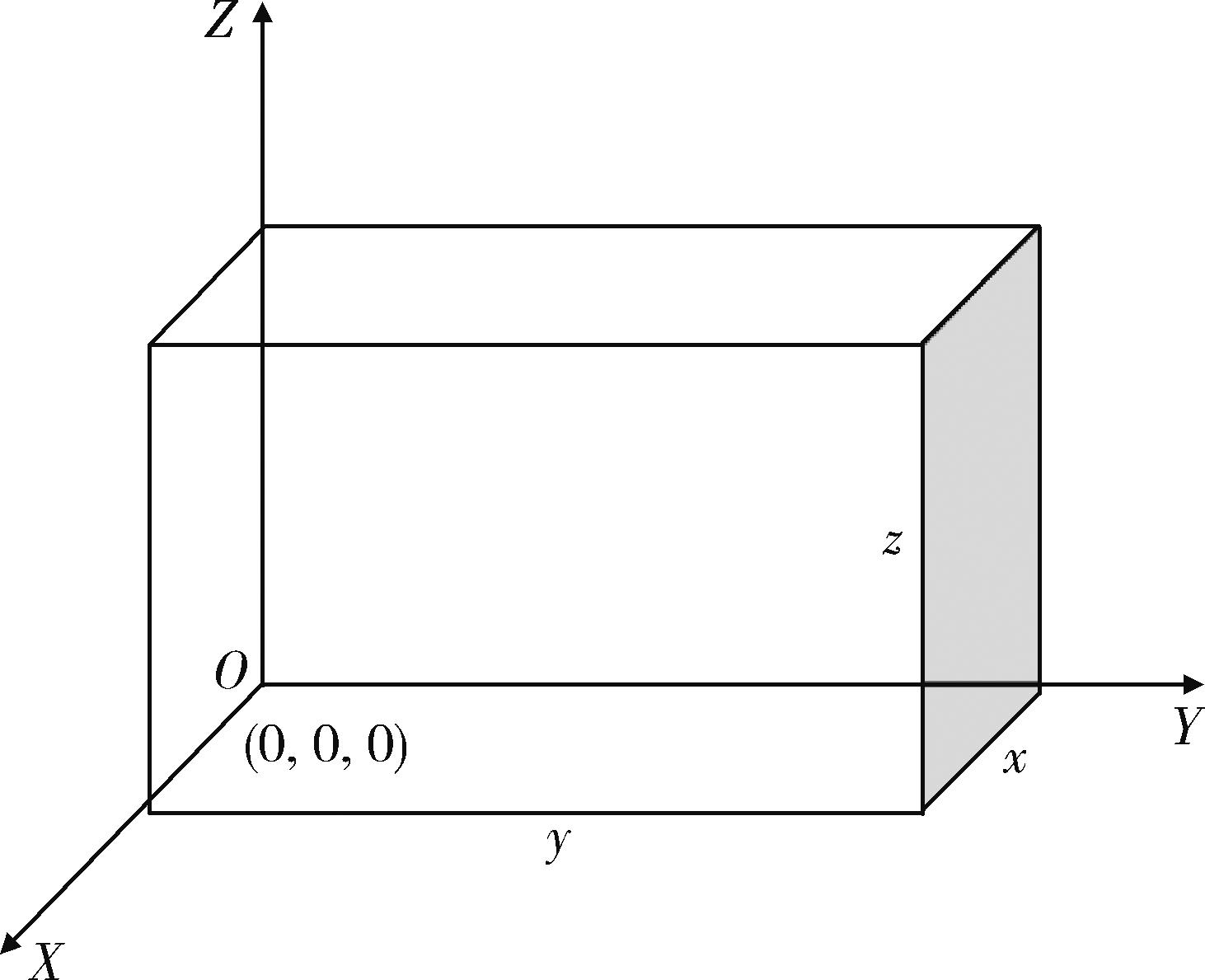
Fig. 1 3D configuration space
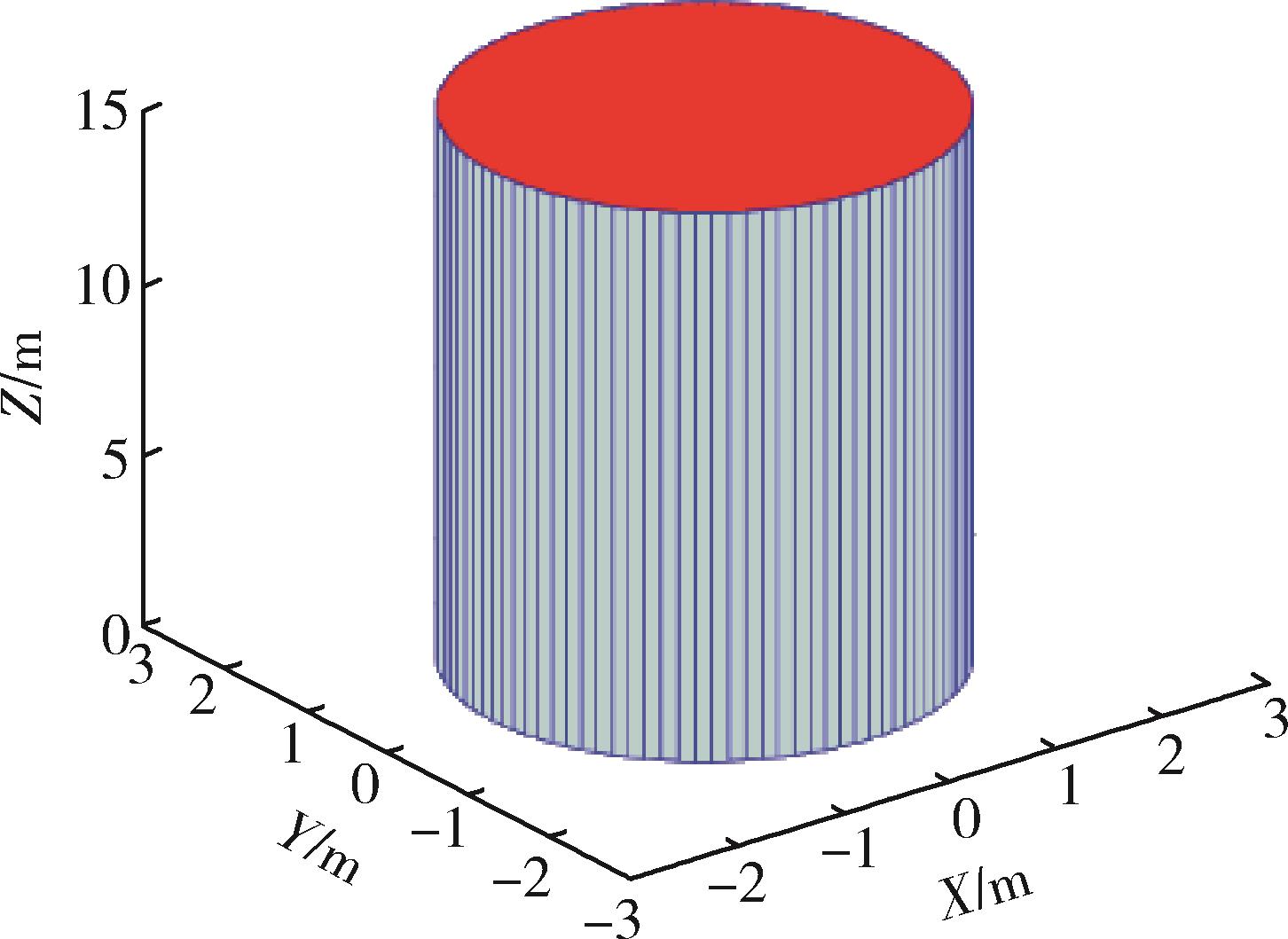
Fig. 2 Urban construction
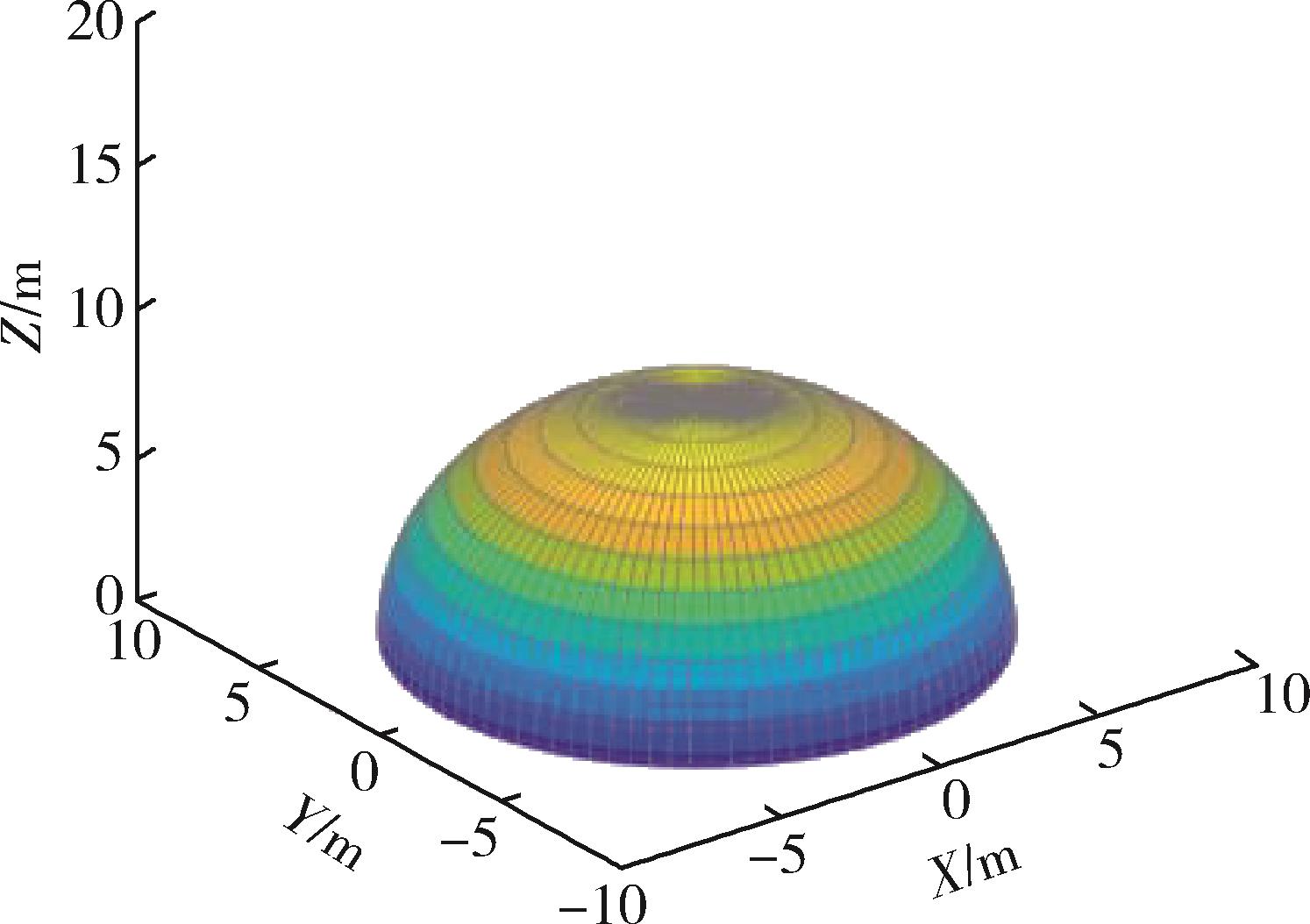
Fig. 3 Ground threat diagram
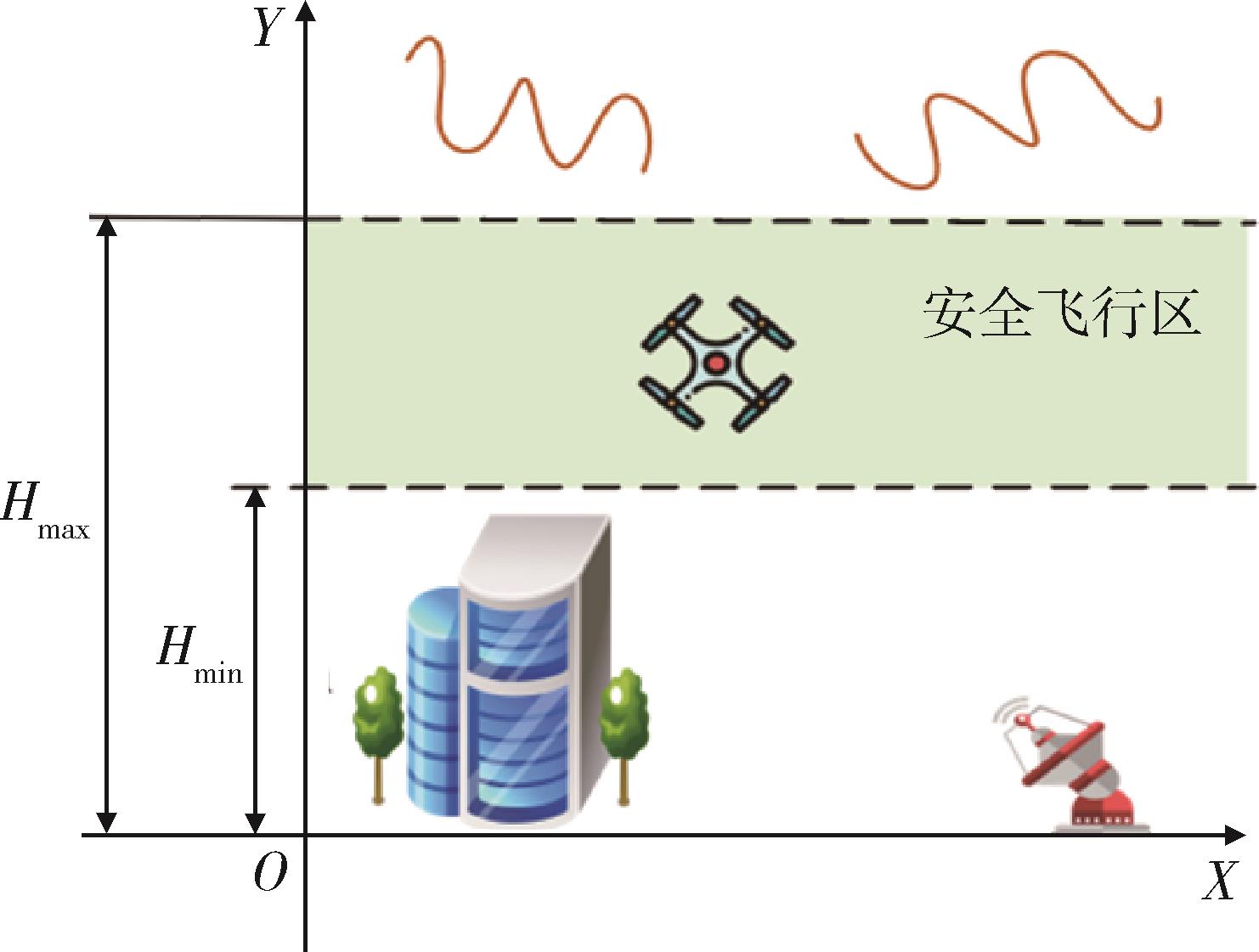
Fig. 4 Flight altitude constraints
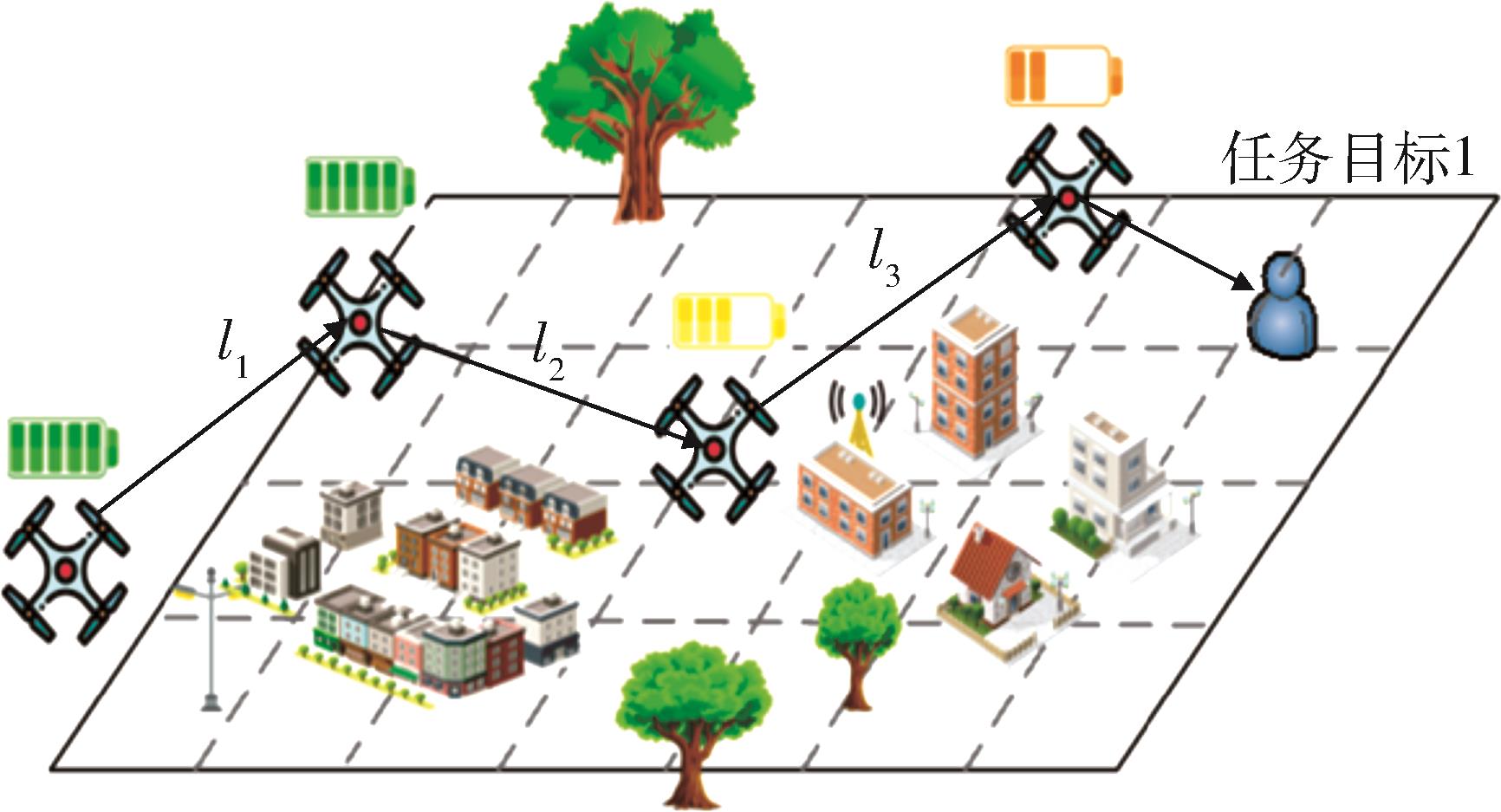
Fig. 5 Maximum range constraints
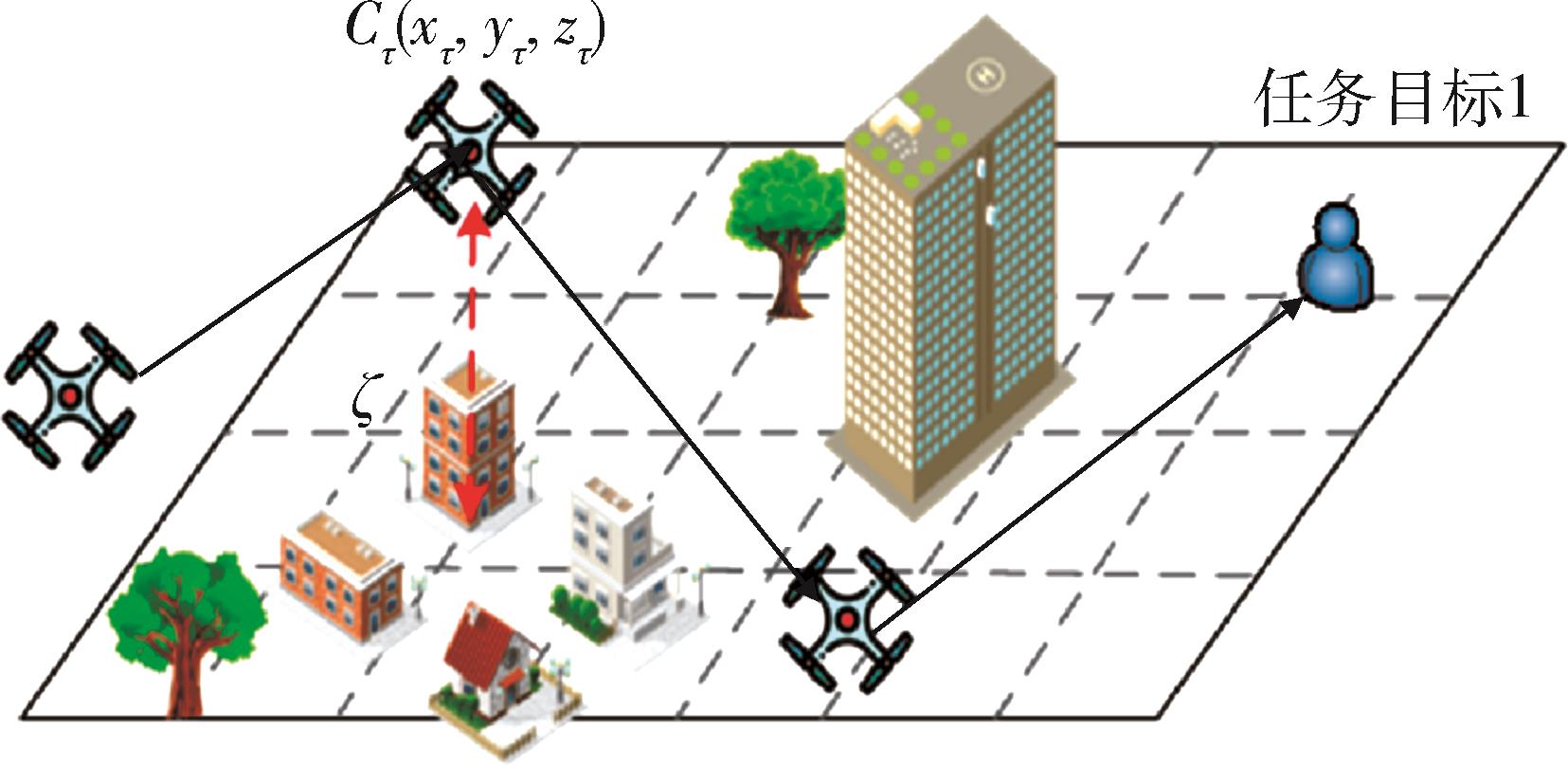
Fig. 6 Obstacle avoidance constraints navigation of oints
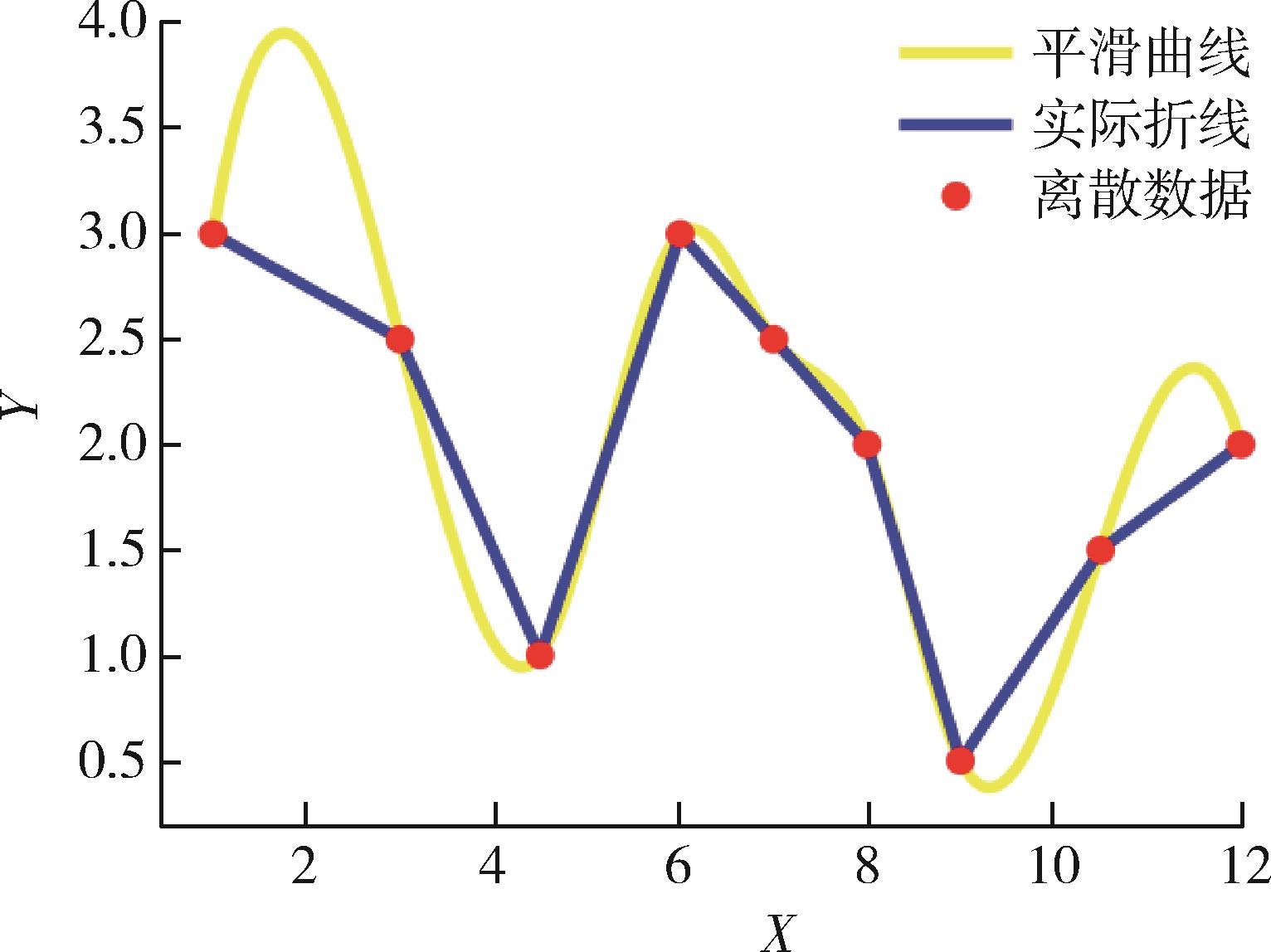
Fig. 7 Cubic B-spline smoothed curve
| 参数名称 | 仿真取值 |
|---|---|
| 规划空间大小 | 500×500 |
| 起始点位置 | (20,10,20) |
| 目标点位置 | (410,380,30) |
| 种群大小 | 30 |
| 最大航程约束 | 1 000 |
| 无人机飞行高度约束 | (0,50) |
| 航程代价权重 | 0.4 |
| 高度变化代价权重 | 0.4 |
| 转弯角代价权重 | 0.2 |
| 迭代次数 | 50 |
Table 1 Simulation parameter settings
| 参数名称 | 仿真取值 |
|---|---|
| 规划空间大小 | 500×500 |
| 起始点位置 | (20,10,20) |
| 目标点位置 | (410,380,30) |
| 种群大小 | 30 |
| 最大航程约束 | 1 000 |
| 无人机飞行高度约束 | (0,50) |
| 航程代价权重 | 0.4 |
| 高度变化代价权重 | 0.4 |
| 转弯角代价权重 | 0.2 |
| 迭代次数 | 50 |
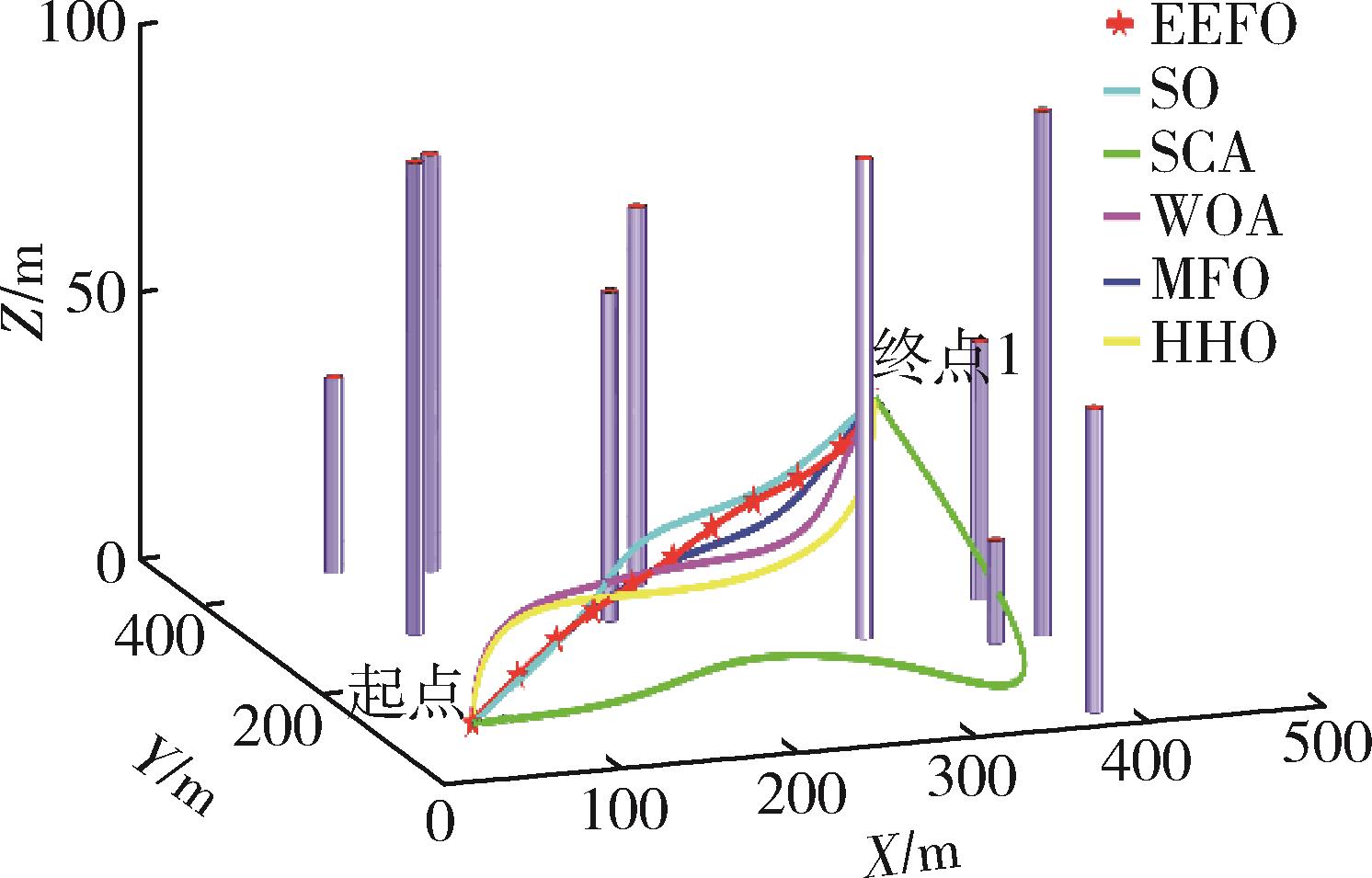
Fig. 8 Tanget strike trajectory in dense urban invincible defensive target in sparse urban 3D environment withact enemy defense
| 场景名称 | 建筑物数量 | 威胁区域数量 |
|---|---|---|
| 无敌防守 | 10 | 0 |
| 有敌防守 | 80 | 10 |
Table 2 Simulation scenario settings
| 场景名称 | 建筑物数量 | 威胁区域数量 |
|---|---|---|
| 无敌防守 | 10 | 0 |
| 有敌防守 | 80 | 10 |
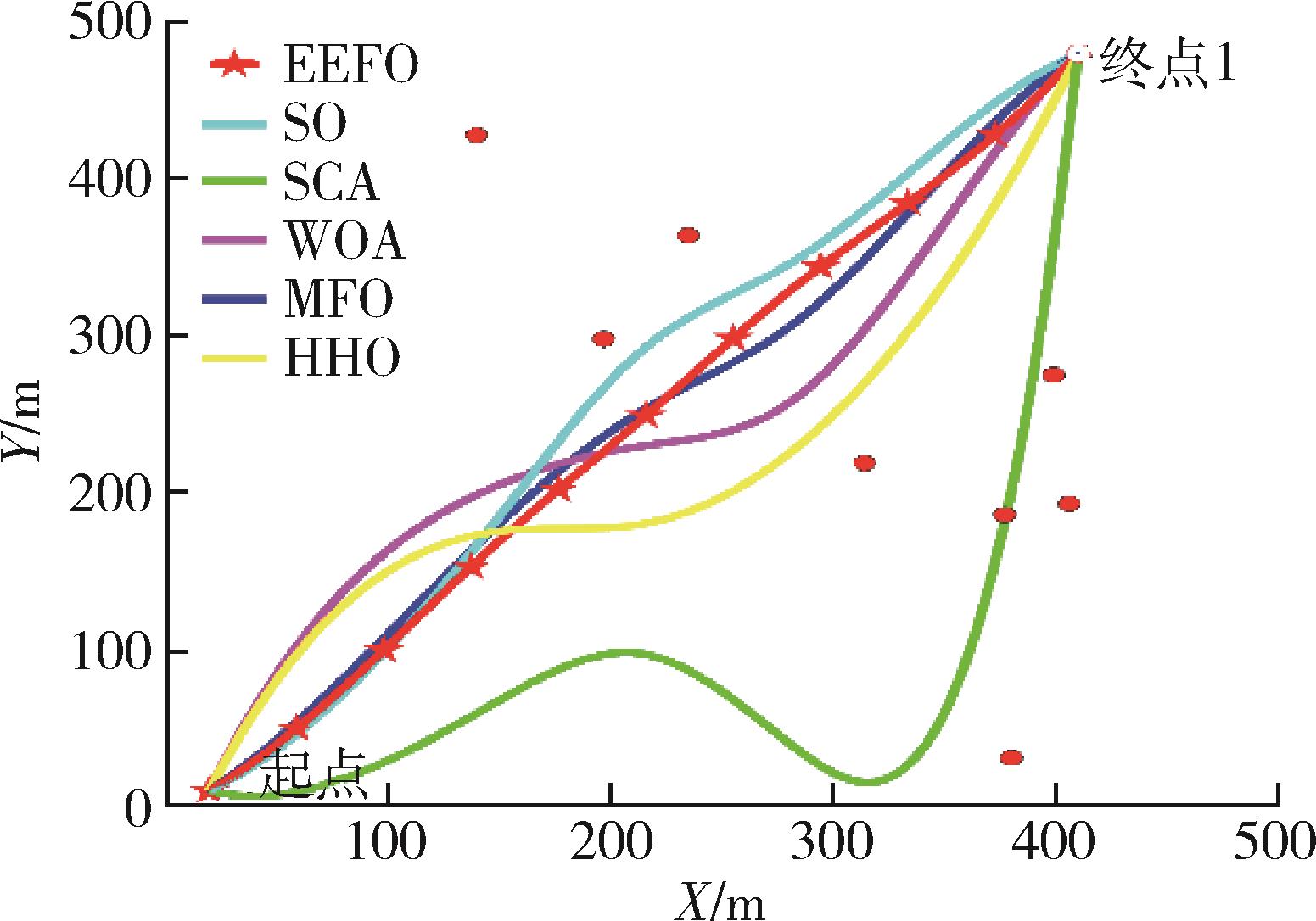
Fig. 9 Target trajectory of invincible defensive target in sparse urban 2D environment without enemy defense
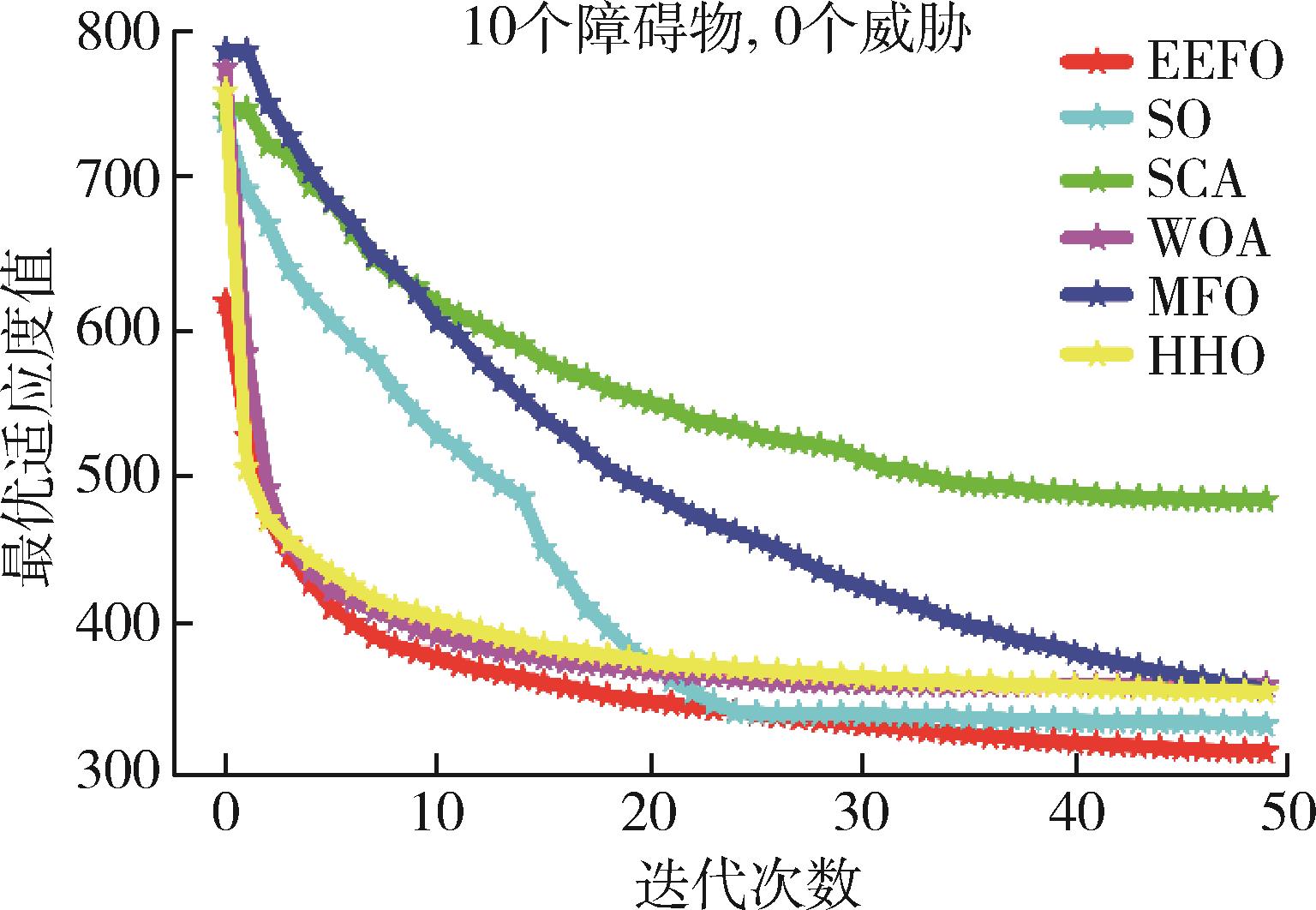
Fig. 10 Convergence for enivornment without enemy defense
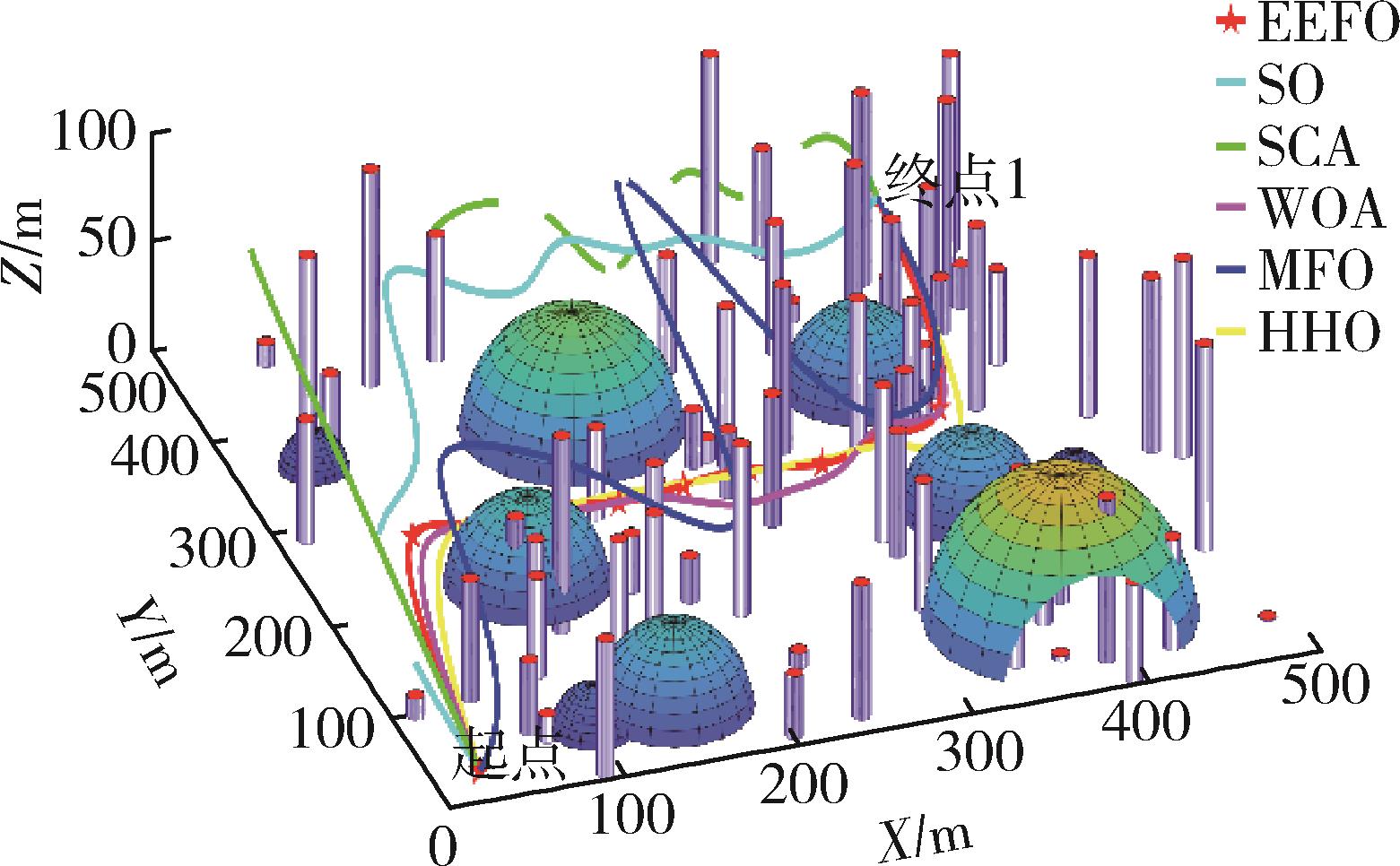
Fig. 11 Target strike trajectory in dense urban 3D environment wilk enemy defense
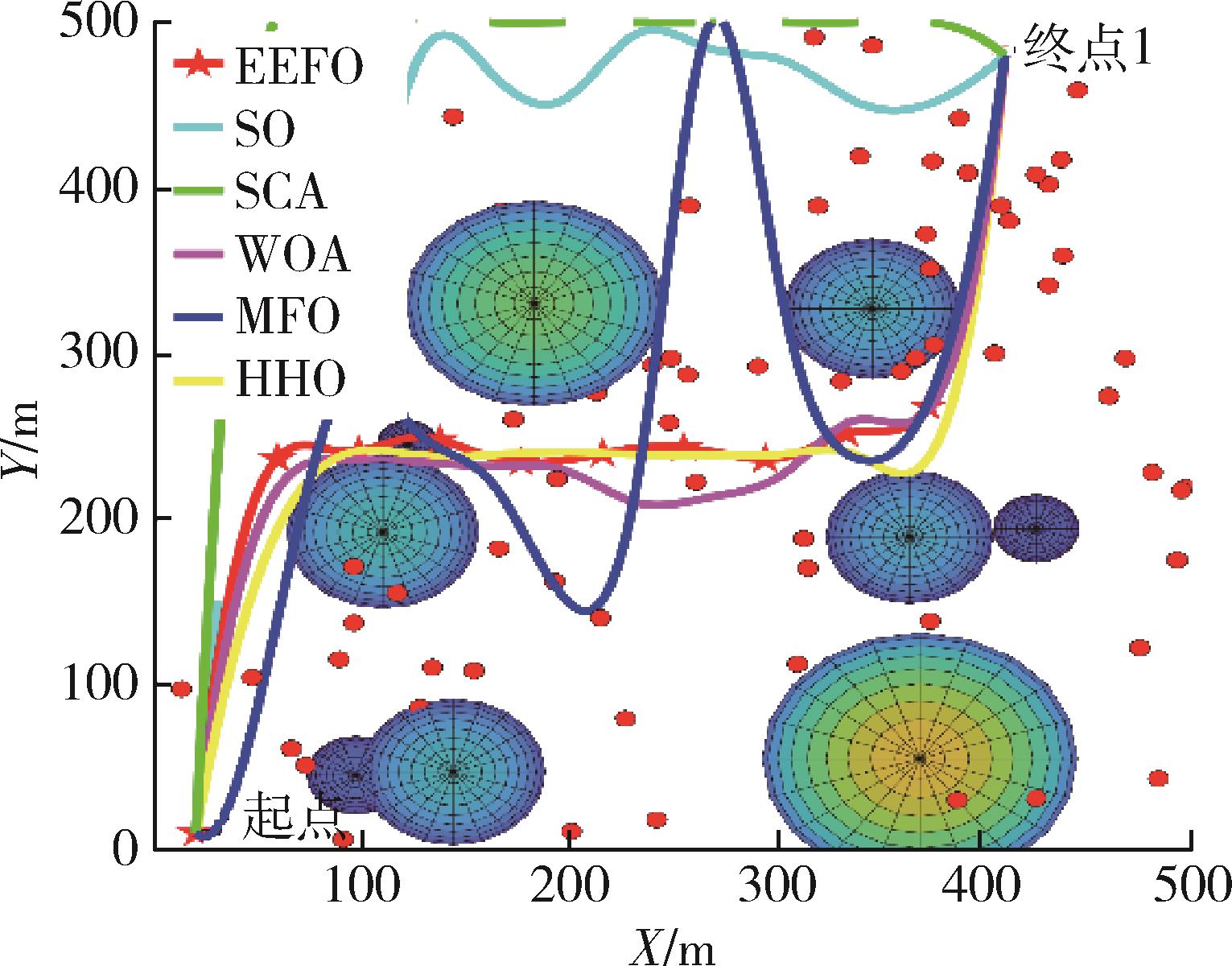
Fig. 12 Target strike trajectory in dense urban environment with enemy defense
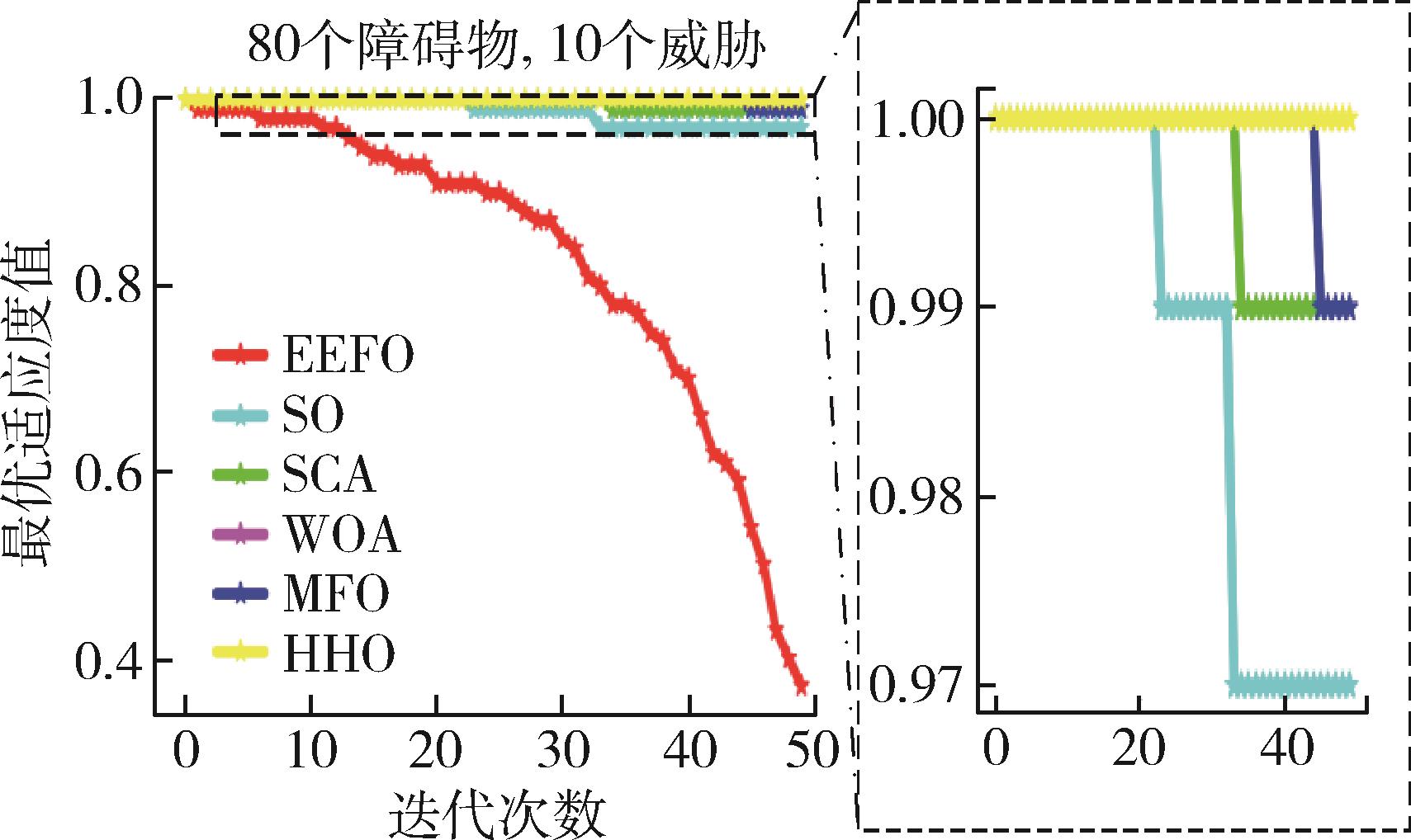
Fig. 13 Convergence for environment with enemy defense
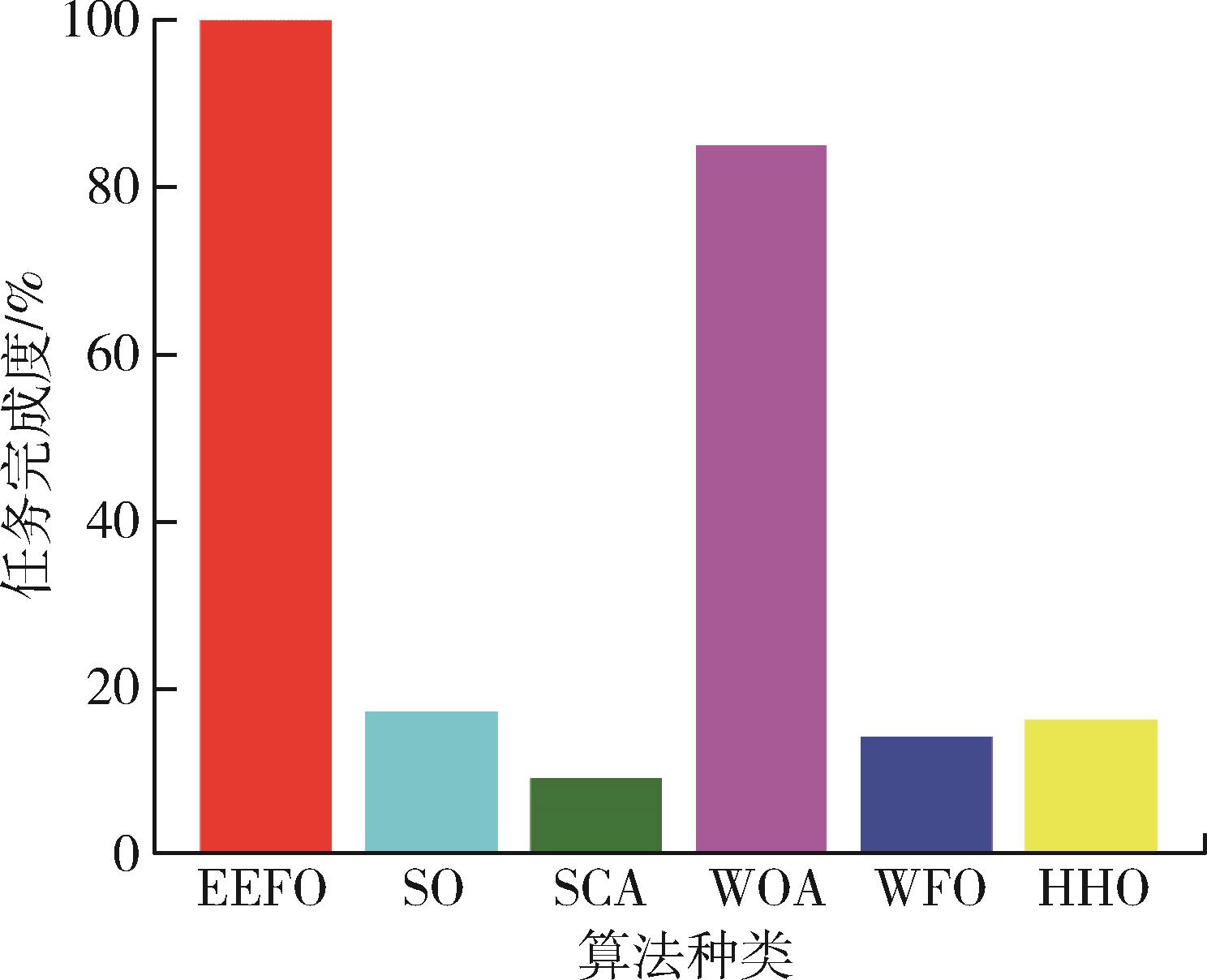
Fig. 14 Algorithm task completion degree in dense urban environment with enemy defense
| 1 | 张换然, 申凌峰, 任资卓, 等. 无人机辅助智能边缘网络技术综述[J]. 电讯技术, 2024, 64(2): 325-332. |
| ZHANG Huanran, SHEN Lingfeng, REN Zizhuo, et al. A Comprehensive Survey on Unmanned Aerial Vehicle Assisted Intelligent Edge Network[J]. Telecommunication Engineering, 2024, 64(2): 325-332. | |
| 2 | 董康生, 胡伟波, 沈雁鸣, 等. 美军无人空战装备智能化发展动态及启示[J]. 现代防御技术, 2022, 50(4): 28-37. |
| DONG Kangsheng, HU Weibo, SHEN Yanming, et al. Development and Implications of Intelligent Unmanned Combat Aerial Equipment by the US Army[J]. Modern Defence Technology, 2022, 50(4): 28-37. | |
| 3 | 杨云志. 中小型无人机AIS侦察系统应用技术[J]. 电讯技术, 2023, 63(1): 14-18. |
| YANG Yunzhi. Applied Technology of Middle and Small-Sized UAV AIS Reconnaissance System[J]. Telecommunication Engineering, 2023, 63(1): 14-18. | |
| 4 | 潘楠, 刘海石, 陈启用, 等. 多基地多目标无人机协同任务规划算法研究[J]. 现代防御技术, 2021, 49(2): 49-56. |
| PAN Nan, LIU Haishi, CHEN Qiyong, et al. Study on Cooperative Mission Planning Algorithm for Multi-Base and Multi-Target UAV[J]. Modern Defence Technology, 2021, 49(2): 49-56. | |
| 5 | RABTA B, WANKMÜLLER C, REINER G. A Drone Fleet Model for Last-Mile Distribution in Disaster Relief Operations[J]. International Journal of Disaster Risk Reduction, 2018, 28: 107-112. |
| 6 | 宋占福, 赵全习, 胡文志, 等. 无人机支援地面防空作战研究[J]. 现代防御技术, 2022, 50(5): 22-27. |
| SONG Zhanfu, ZHAO Quanxi, HU Wenzhi, et al. Research on UAV Supporting Ground Air Defense Operations[J]. Modern Defence Technology, 2022, 50(5): 22-27. | |
| 7 | MUÑOZ J, LÓPEZ B, QUEVEDO F, et al. Multi UAV Coverage Path Planning in Urban Environments[J]. Sensors, 2021, 21(21): 7365. |
| 8 | WU Jianfa, WANG Honglun, LI Na, et al. Path Planning for Solar-Powered UAV in Urban Environment[J]. Neurocomputing, 2018, 275: 2055-2065. |
| 9 | HU Xinting, PANG Bizhao, DAI Fuqing, et al. Risk Assessment Model for UAV Cost-Effective Path Planning in Urban Environments[J]. IEEE Access, 2020, 8: 150162-150173. |
| 10 | 甯洋, 郑波, 龙足腾, 等. 基于CMPSO算法的无人机复杂三维路径规划[J]. 电光与控制, 2024, 31(4): 35-42. |
| NING Yang, ZHENG Bo, LONG Zuteng, et al. Complex 3 D Path Planning for UAVs Based on CMPSO Algorithm[J]. Electronics Optics & Control, 2024, 31(4): 35-42. | |
| 11 | 胡莘婷, 吴宇. 面向城市飞行安全的无人机离散型多路径规划方法[J]. 航空学报, 2021, 42(6): 452-463. |
| HU Shenting, WU Yu. Risk-Based Discrete Multi-Path Planning Method for UAVs in Urban Environments[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(6): 452-463. | |
| 12 | 赵凯, 朱愿, 王任栋. 基于均值高程图的城市环境三维LiDAR点云地面分割方法[J]. 军事交通学院学报, 2018, 20(9): 80-84. |
| ZHAO Kai, ZHU Yuan, WANG Rendong. Mean Elevation Map-Based Ground Segmentation Method for 3D LiDAR Point Cloud Under Urban Environment[J]. Journal of Military Transportation University, 2018, 20(9): 80-84. | |
| 13 | 宋海洋. 基于深度Q网络与A*算法的城市无人机路径规划研究[D]. 成都: 四川大学, 2023. |
| SONG Haiyang. Research on Urban Unmanned Aerial Vehicle Path Planning Based on Deep Q-Network and A* Algorith[D]. Chengdu: Sichuan University, 2023. | |
| 14 | 李歆莹, 房建武. 城市环境下基于A*算法和DWA算法的无人机路径规划方法研究[J]. 无人系统技术, 2023, 6(2): 61-70. |
| LI Xinying, FANG Jianwu. Research on UAV Path Planning by A* Algorithm and DWA Method in the Urban Environment[J]. Unmanned Systems Technology, 2023, 6(2): 61-70. | |
| 15 | 谢文勋. 城市环境下基于深度强化学习的无人机多维路径规划[D]. 广汉: 中国民用航空飞行学院, 2023. |
| XIE Wenxun. Multidimensional Path Planning for UAV Based on Deep Reinforcement Learning in Urban Environments[D]. Guanghan: Civil Aviation Flight University of China, 2023. | |
| 16 | LIN Yucong, SARIPALLI S. Sampling-Based Path Planning for UAV Collision Avoidance[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(11): 3179-3192. |
| 17 | WANG Xueyuan, GURSOY M C, ERPEK T, et al. Learning-Based UAV Path Planning for Data Collection with Integrated Collision Avoidance[J]. IEEE Internet of Things Journal, 2022, 9(17): 16663-16676. |
| 18 | 许伦辉, 曾豫豪. 基于改进ACO和三次B样条曲线的路径规划[J]. 计算机仿真, 2022, 39(7): 407-411. |
| XU Lunhui, ZENG Yuhao. Path Planning Based on Improved ACO and Cubic B-Spline Curve[J]. Computer Simulation, 2022, 39(7): 407-411. | |
| 19 | ALZAKARI S A, IZCI D, EKINCI S, et al. A New Control Scheme for Temperature Adjustment of Electric Furnaces Using a Novel Modified Electric Eel Foraging Optimizer[J]. AIMS Mathematics, 2024, 9(5): 13410-13438. |
| 20 | PHONG D H T, LINH N T. Optimize Power Generation of Thermal Generating Sources in Solving the Green Energies-Based Economic Load Dispatch Using Electric Eel Foraging Optimization[J]. World Journal of Advanced Engineering Technology and Sciences, 2024, 11(2): 368-378. |
| 21 | HEIDARI A A, MIRJALILI S, FARIS H, et al. Harris Hawks Optimization: Algorithm and Applications[J]. Future Generation Computer Systems, 2019, 97: 849-872. |
| [1] | Haonan QIU, Ming HE, Wei HAN, Xin XU, Haotian CHEN, Yiran WEI. A Phase Transition Control Method for UAV Swarm Based on Birds’ Behaviors [J]. Modern Defense Technology, 2025, 53(1): 11-22. |
| [2] | Runze WU, Weishi PENG, Yixuan MA. Evaluation of Combat Effectiveness of Anti-UAV Swarm System Based on Improved TOPSIS Method [J]. Modern Defense Technology, 2025, 53(1): 63-72. |
| [3] | Yanyan MA, Qiang LIN, Chuang NIU, Haida YANG. Simulation Method of Target Track Based on Embedded Particle Swarm Optimization Algorithm [J]. Modern Defense Technology, 2024, 52(5): 51-60. |
| [4] | Jiangfeng YUE, Jinghua XIE. Research on Evaluation Method of Anti-UAV Schemes [J]. Modern Defense Technology, 2024, 52(5): 9-16. |
| [5] | Jingyu HE, Jizheng LIU, Zhichen YANG, Dongdong WANG, Ping OU. Development and Testing of Multi Rotor Unmanned Aerial Vehicle Noise Source Tracking and Positioning System [J]. Modern Defense Technology, 2024, 52(3): 1-8. |
| [6] | Zonghui WANG, Yunjun YANG, Hongrui ZHAO, Jiaxiang ZHAO. Numerical Simulation of Tilting Wing and Rotor UAV During Transition Flight [J]. Modern Defense Technology, 2024, 52(3): 9-19. |
| [7] | Linan WANG, Guanghui WEN, Xiaojian YI. Finite-time Attitude Consensus Control of Multiple Unmanned Aerial Vehicles Under State Constraints [J]. Modern Defense Technology, 2024, 52(2): 124-131. |
| [8] | Wenru FAN, Quanwei LIU, Bailing TIAN. Trajectory Tracking Control of Quadrotor UAV Based on Disturbance Compensation [J]. Modern Defense Technology, 2024, 52(2): 87-93. |
| [9] | Zhen ZHOU, Yujie CAI, Yang YANG, Chuangwei WANG, Yunfei ZHANG. Review of World Air and Missile Defense in 2022 and Enlightenment to China’s Development [J]. Modern Defense Technology, 2023, 51(6): 26-35. |
| [10] | Hanwen ZHANG, Xusheng GAN, Xiaolong WEI, Rongjia TONG. Research on Air Combat Maneuver Decision-Making of UAVs Based on Path-Game Hybrid Strategy [J]. Modern Defense Technology, 2023, 51(6): 87-96. |
| [11] | Changhong QU, Yu SONG, Kun WANG, Qingyong CUI, Jiangyang CHEN. Deployment Method of Ground-Based Tactical Laser System for UAV Swarm Defense Based on PSO Algorithm [J]. Modern Defense Technology, 2023, 51(5): 15-24. |
| [12] | Guodong YUAN, Ming HE, Wei HAN, Minggang YU, Mingyang CHENG. Research on Resilience Reconstruction of Community Network of Unmanned Aerial Vehicle Swarm [J]. Modern Defense Technology, 2023, 51(5): 50-58. |
| [13] | Ruijie WANG, Dechao WANG, Lu FENG, Zhengdang ZHAO, Zheliang CHEN. Research Progress and Countermeasures Against UAV Swarm Operations Abroad [J]. Modern Defense Technology, 2023, 51(4): 1-9. |
| [14] | Biyan LI, Shun HU. Formation Control of UAV Swarm with Bearing-Only Measurements [J]. Modern Defense Technology, 2023, 51(2): 55-61. |
| [15] | Bao-jun ZHAO, Shi-tao CHEN, Da-xi LI, Ran ZHAO. Analysis of the Sixth Generation Fighter Development and Operational Concept [J]. Modern Defense Technology, 2022, 50(6): 19-25. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||


